背景数学知识简述
Posted 大饼博士X
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了背景数学知识简述相关的知识,希望对你有一定的参考价值。
文章目录
第2章 背景数学知识简述
主要参考是[1]和[2]的内容。特别是[2],比较简明又全面的介绍了需要的数学背景知识。主要需要数学分析(主要是实分析,Real analysis), 微积分(calculus), 以及线性代数(linear algebra)的最基础数学背景知识。
2.1 数学分析和微积分基础
函数性质
-
极限:

-
连续:

一个函数 f f f在 x x x点连续(dom表示定义域),说明一定存在一个点 y y y,当和 x x x足够近的时候,他们的函数值也一定足够近。 -
可微:

一个函数 f f f在点 x x x上可微的定义如上,看起来比较复杂。其中 D f ( x ) Df(x) Df(x)叫做函数在 x x x的微分(也叫Jacobian矩阵,一元变量的时候一般叫导数,但是很多时候说导数其实就是说微分,混着用),记成:

函数 f f f在点 x x x的一阶近似,称为affine function,形式如下。当 z z z非常接近 x x x的时候,affine function非常接近 f f f.
f ( x ) + D f ( x ) ( z − x ) f(x) + Df(x)(z-x) f(x)+Df(x)(z−x) -
光滑: f f f is smooth if the derivatives of f f f are continuous over all of dom f f f
-
Lipschitz连续:A function f f f is Lipschitz with Lipschitz constant L L L if
∥ f ( x ) − f ( y ) ∥ ≤ L ∥ x − y ∥ , ∀ x , y ∈ d o m f \\| f(x) - f(y)\\| \\leq L\\|x-y\\|, \\forall x,y \\in domf ∥f(x)−f(y)∥≤L∥x−y∥,∀x,y∈domf
If we refer to a function f as Lipschitz, we are making a stronger statement about the continuity of f. A Lipschitz function is not only continuous, but it does not change value very rapidly, either. -
泰勒展开Taylor Expansion:一个函数的一阶泰勒展开,是函数的线性近似
f ( y ) ≈ f ( x ) + ▽ f ( x ) ( y − x ) f(y) \\approx f(x)+\\triangledown f(x)(y-x) f(y)≈f(x)+▽f(x)(y−x)
可以看成是函数 f ( x + ( y − x ) ) f(x + (y-x)) f(x+(y−x))在 x x x处展开。二阶泰勒展开形式是
f ( y ) ≈ f ( x ) + ▽ f ( x ) ( y − x ) + 1 2 ( y − x ) T ▽ 2 f ( x ) ( y − x ) f(y) \\approx f(x)+\\triangledown f(x)(y-x) + \\frac12(y-x)^T \\triangledown^2 f(x)(y-x) f(y)≈f(x)+▽f(x)(y−x)+21(y−x)T▽2f(x)(y−x)
集合Sets
-
Interior内点集:

意思是说,以x为中心,存在一个球全部在集合C中,那么x就是集合C的一个内点。虽然上面是用欧氏距离来定义距离的,实际上所有的norm形式都可以同样的内点集合。所有集合C的内点集合叫做C的interior,记为 int C \\textintC intC. -
补集:The complement of the set C ⊆ R n C \\subseteq R^n C⊆Rn is denoted by R n ∖ C R^n \\setminus C Rn∖C. It is the set of all points not in C.
-
开集:A set C is open if int C = C \\textintC = C intC=C, i.e., every point in C is an interior point.
-
闭集:A set C ⊆ R n C \\subseteq R^n C⊆Rn is closed if its complement R n ∖ C = x ∈ R n ∣ x ∉ C R^n \\setminus C = \\x \\in R^n | x \\notin C\\ Rn∖C=x∈Rn∣x∈/C is open.
-
闭包Closure:

理解有点复杂,后半句是说,如果 x x x属于集合C的闭包中,那么就是说集合C中存在着和 x x x点无限接近的点( y y y)。 -
边界:

很形象,如果一个C上的点 x x x,存在和它无限接近的点 y y y在C中,也存在和它无限接近的点 z z z不在集合C中,那么 x x x就是一个边界点。边界的概念也可以用来区分开集和闭集——如果一个集合C包含了它的边界,那么是闭集;如果C和它的边界点集合的交集为空,那么它是开集。
Norms
- 内积、欧氏距离、项链夹角

- 常见的例子: l 0 , l 1 , l 2 , l ∞ l_0,l_1,l_2,l_\\infty l0,l1,l2,l∞



- Frobenius norm:

- Dual norm:这个概念在优化理论推导的时候貌似是很重要的,但是目前我还不能体会精华,就先放一下截图,不详细展开。以后如果能更理解透彻,再来补充。

线性函数、仿射函数

函数的微分(导数)
这一块在[2]中的附录讲的比较详细,这里不展开特别多的。

-
矩阵乘积和矩阵逆的微分

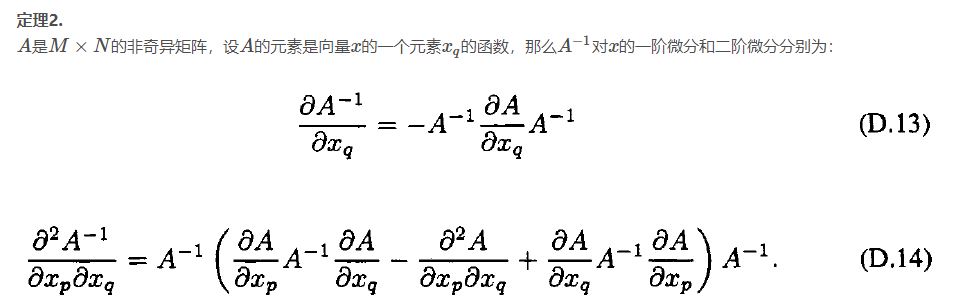
-
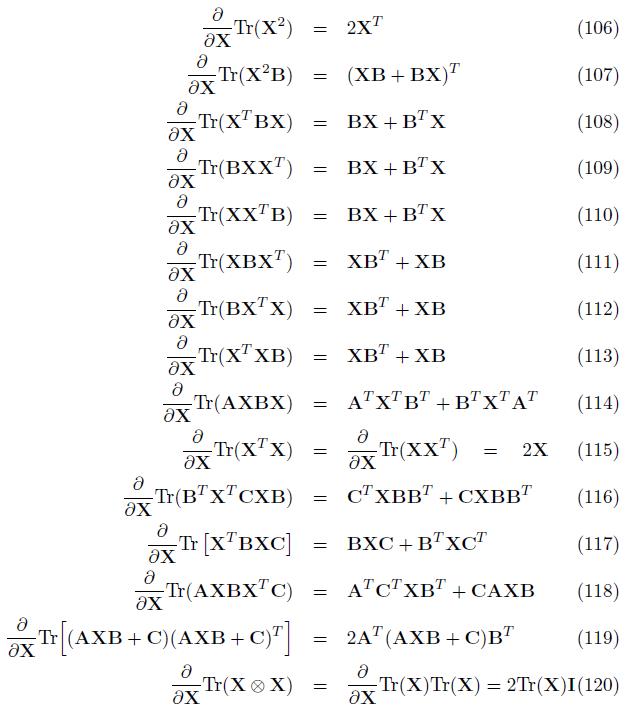
矩阵迹的微分(Derivative of Traces)
在机器学习中,有时候需要对一个矩阵的F模进行微分,而矩阵的F是可以转换为矩阵的迹,矩阵的迹的微分的计算可以帮助我们计算矩阵的F模的微分。比如在线性回归模型中,输出不是0和1,而是一个向量,这时整个输出矩阵就不是向量而是矩阵的。这会在最后的例子中具体说明。[3] -
矩阵的F模和迹的关系:

其中 A ∗ A^* A∗是 A A A的共轭转置。矩阵的迹的性质

Matrix Cookbook中给出了矩阵迹的微分的一般表达式:
∂
∂
x
t
r
(
F
(
x
)
)
=
f
(
x
)
T
\\frac \\partial \\partial xtr(F(x))=f(x)^T
∂x∂tr(F(x))=f(x)T。其中,
f
(
)
f()
f()是
F
(
)
F()
F()的微分。
给一下常用的求矩阵微分的公式:


2.2 线性代数基础
Matrix Subspaces
- 矩阵值域Range: 矩阵 A ∈ R m × n A \\in R^m \\times n A∈Rm×n,A的值域Range的含义: x x x是一个任意的n维向量,经过矩阵A(m*n的矩阵)变换后,得到的所有可能的n维向量的集合就是A的值域。或者说,the set of all vectors in R m R^m Rm that can be written as linear combinations of the columns of A. 记成:
R ( A ) = A x ∣ x ∈ R n R(A) = \\Ax | x \\in R^n\\ R(A)=Ax∣x∈Rn
- 行空间Row Space: The row space of a matrix A is the subspace spanned of the rows of A.
- 列空间Column Space: The column space of a matrix A is the subspace spanned of the columns of A.
- 零空间Null Space: The null space of a matrix A is the set of all x such that A x = 0 Ax = 0 Ax=0.
- 矩阵的秩Rank:线性无关的列数(或者行数),
r
a
n
k
A
≤
m
i
n
m
,
n
rankA \\leq min\\m,n\\
rankA≤minm,n,满秩的时候取等号。如果矩阵A是方阵并且满秩,那么A是可逆的。

- 正交子空间Orthogonal Subspaces:

正定和半正定矩阵

下面给出最最基本的矩阵特征分解以及SVD分解的形式,具体应用就需要大家自己再去理解了。
特征分解
一般写成下面这样的形式: 以上是关于背景数学知识简述的主要内容,如果未能解决你的问题,请参考以下文章
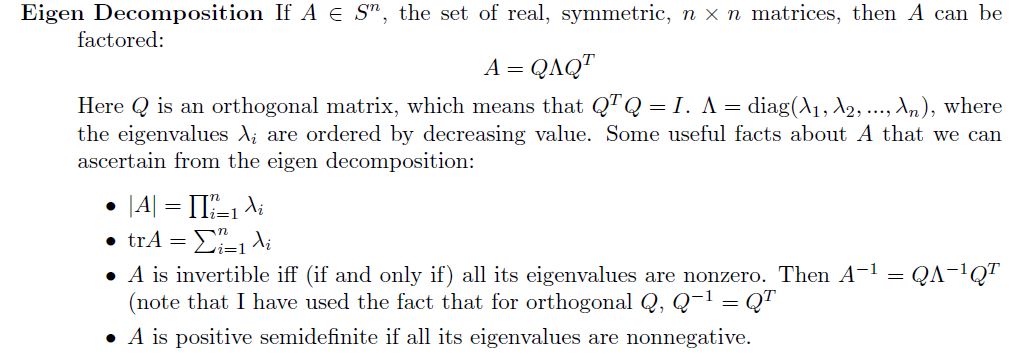
特征值全部非零 <==>那么矩阵A可逆,是等价的两个条件。而且很重要的是,可以直接对特征值逐个求逆就行了。特征值一般习惯用降序排列,也就是说
λ
1
\\lambda_1
λ1是最大特征值。这里的大小是用数值比较的,也就是正的大于负的,而不是看绝对值大小。

下面两种Norm的定义,可以用特征值来表示。F-norm稍微说下,很容易理解,用特征分解:
∣
∣
A
∣
∣
F
2
=
t
r
a
c
e
(
A
T
A
)
=
t