ROS实验笔记之——无人机在VICION下试飞
Posted gwpscut
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了ROS实验笔记之——无人机在VICION下试飞相关的知识,希望对你有一定的参考价值。
之前博《ROS实验笔记之——自主搭建四旋翼无人机》、《ROS实验笔记之——JCV-450无人机初入门》、《ROS实验笔记之——基于Prometheus自主无人机开源项目的学习与仿真》已经介绍过一些无人机的仿真,试飞。本博文基于vicion实现一下无人机的试飞。
先上图看看我们的无人机长啥样,这是购买阿木实验室的。但是一到货之后,先是发现螺丝都是生锈的,都是二手产品,其次发现TX2机载电脑是坏的。。。。无耐之下只能向阿木实验室再买了一台机载电脑。。。。。。。

电脑软件准备工作
首先需要安装QGC(连接到飞机,监控飞机本身的状态,如传感器是否正常,参数配置是否正常)和nomachine(用作远程连接到板载计算机,简单来说就是控制用的)
安装的连接在阿木的官网。
QGC的安装这里就不介绍了,之前博客也有介绍过了。
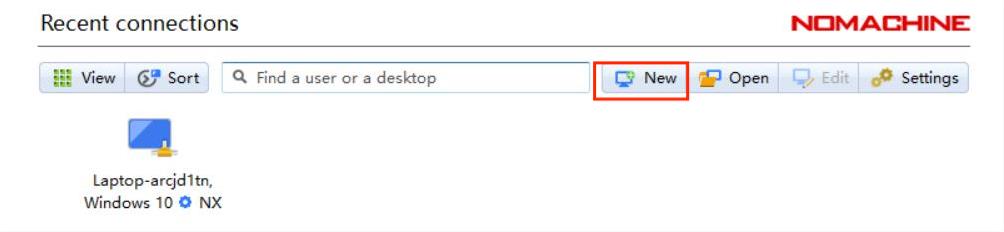
正常安装按完成之后,打开nomachine。
首先连接到飞机的wifi,点击New
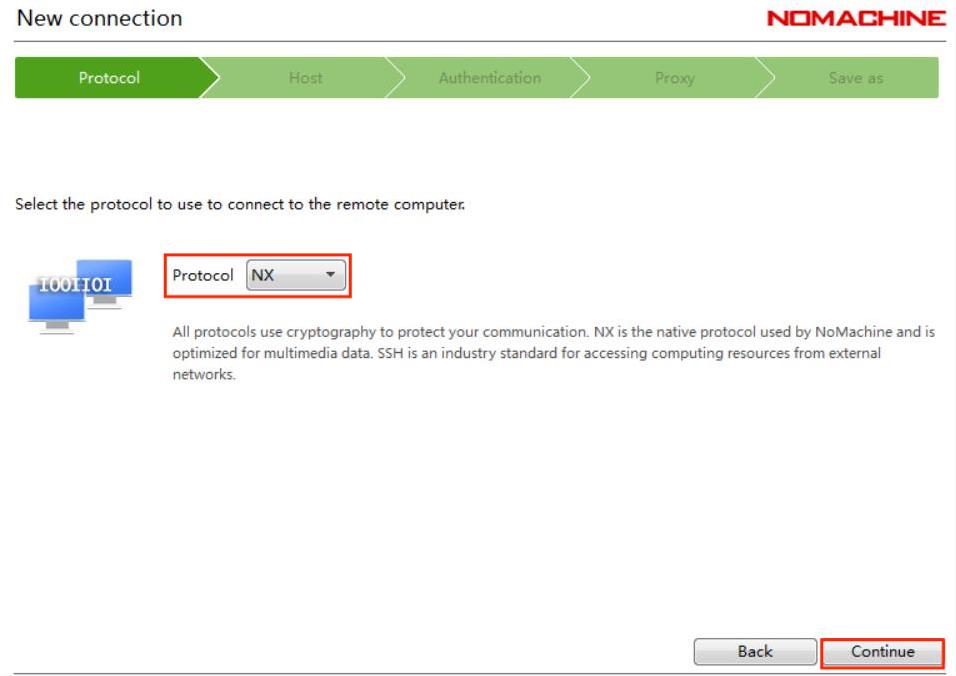
在Protocol下选择NX,点击Continue。
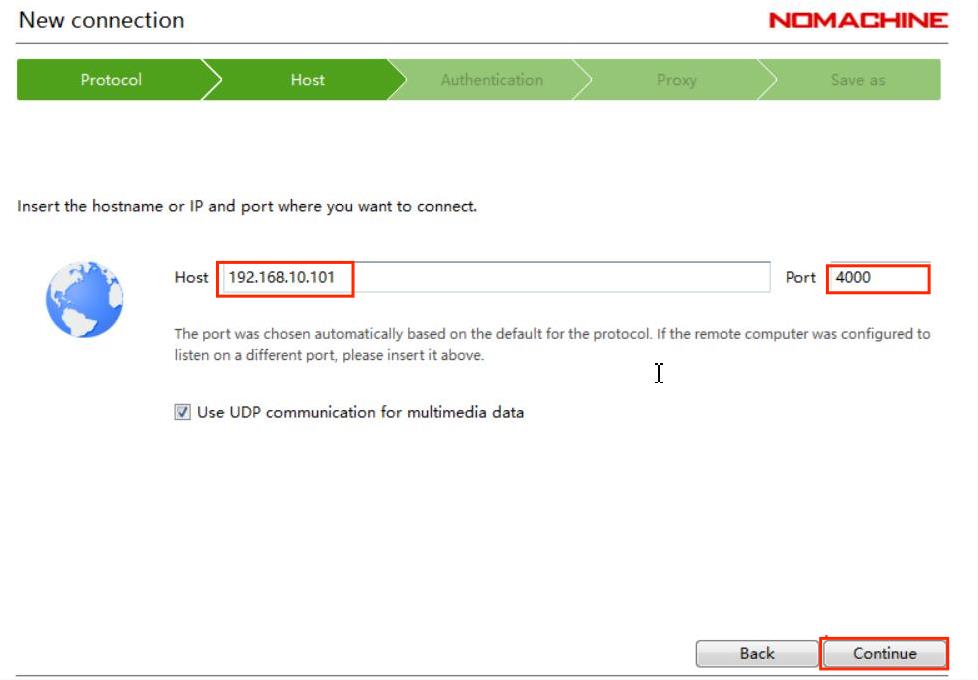
在“Host”下填写板载计算机的ip地址,板载计算机地址参考步骤2,“Port”下默认4000。
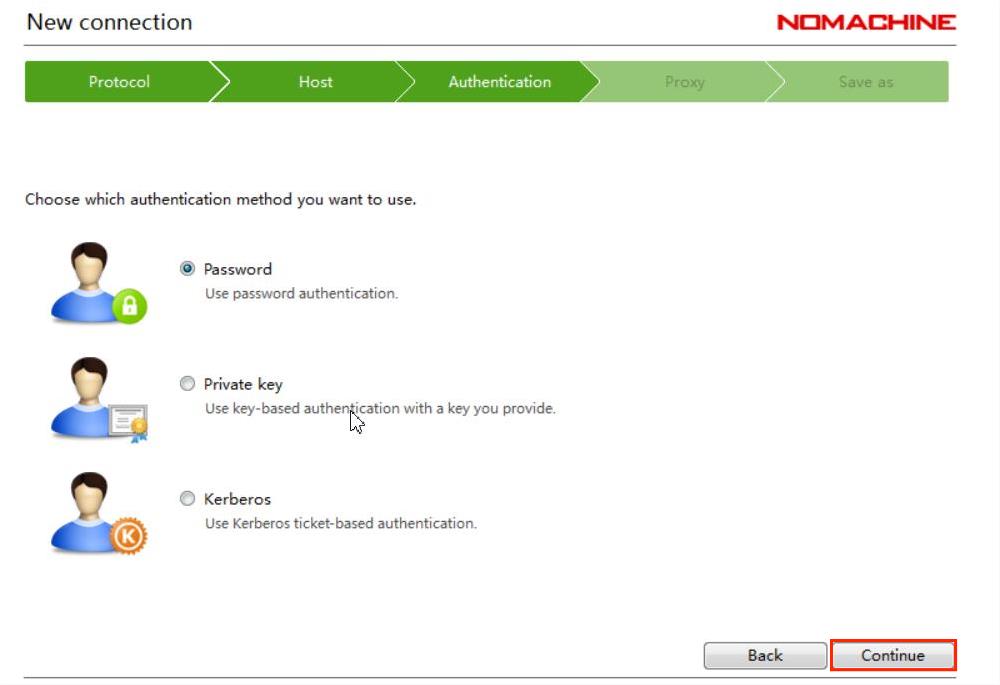
在Authentication下默认是Password,点击“Continue”。
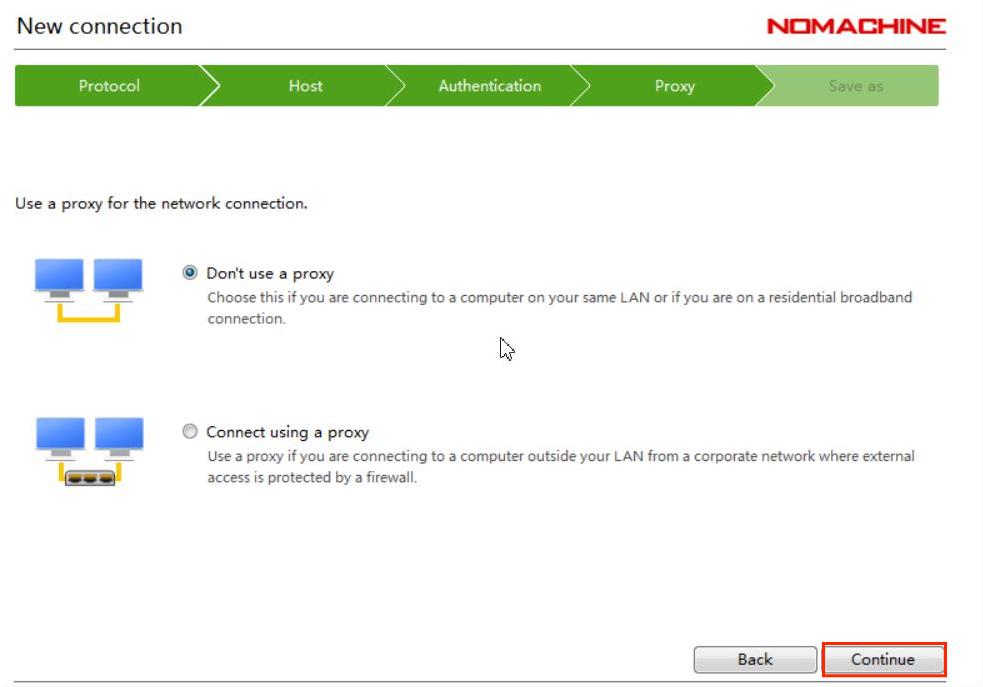
在Proxy下默认是“Don’t use a proxy”,点击“Continue”。
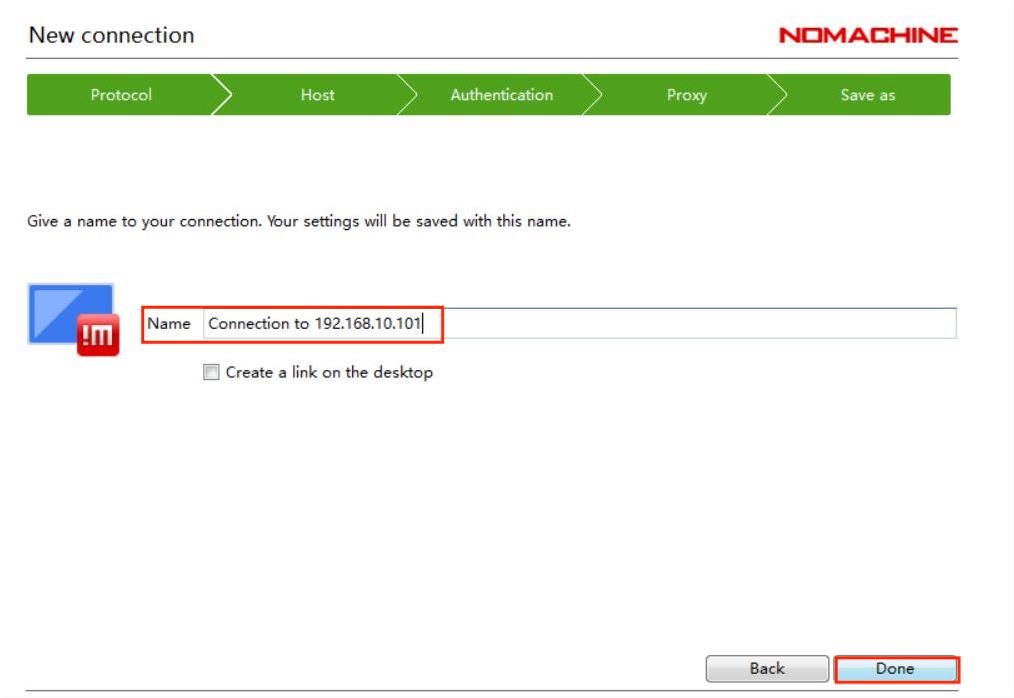
在Save as下会生成默认的name,可以不做更改,点击“Done”。
按照上述步骤操作,会自动生成如下图所示用红框标起的链接,点击“Connect”。
在“Username”和“Password”下输入“amov”
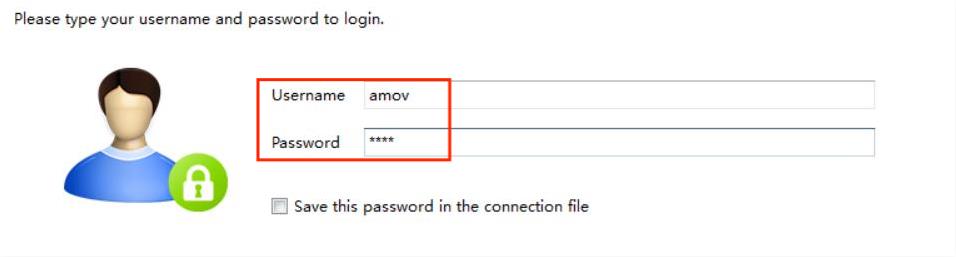
把其配置好后如下
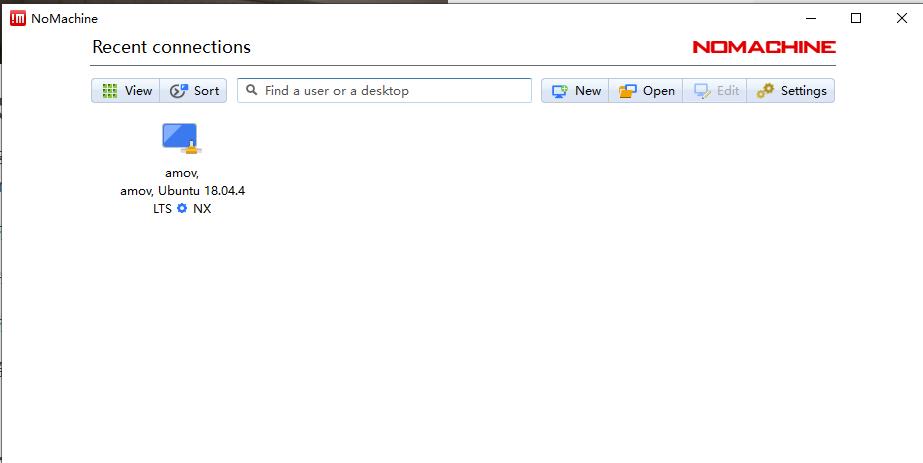
Nomachine成功连接板载计算机后会显示如下界面

基于QGC进行校准
基于QGC的校准之前博客已经提过,这里重点把关键点记录一下
烧写固件时,应将飞控断电,仅用USB连接到电脑。若地面站为识别飞控,可多次插拔USB。
在“机架”界面选择标准四旋翼机架,选择DJI F450,然后在右上角点击“应用并重启”
电池校准需要认真看看(电池校准 — P系列无人机-wiki 1.0 文档 https://prometheus-wiki.readthedocs.io/zh_CN/main/docs/baseconfig_for_px4/7-%E7%94%B5%E6%B1%A0%E6%A0%A1%E5%87%86.html)
https://prometheus-wiki.readthedocs.io/zh_CN/main/docs/baseconfig_for_px4/7-%E7%94%B5%E6%B1%A0%E6%A0%A1%E5%87%86.html)
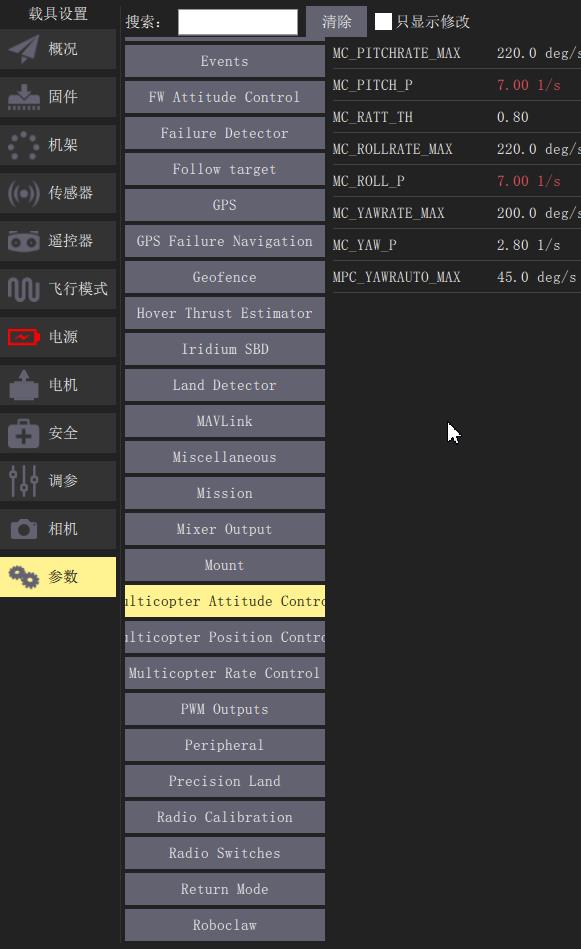
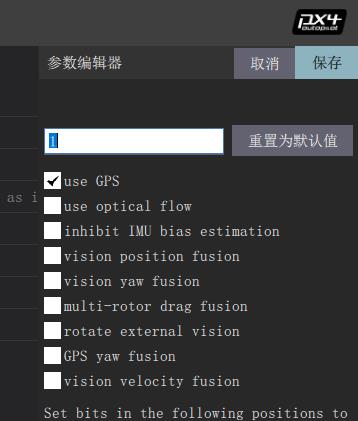
在参数设置下面的搜索界面,搜索关键字即可调整参数。
aid_mask:位置估计来源选择
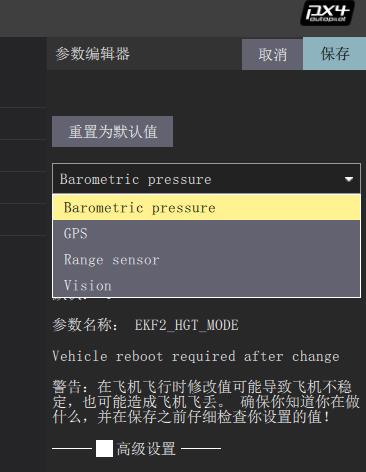
hgt_mode:高度估计来源选择
基本的飞行代码回顾
先可以参考之前的博客,将代码再配一次~
ROS实验笔记之——基于Prometheus自主无人机开源项目的学习与仿真_gwpscut的博客-CSDN博客
但是本博文决定不使用这个代码,改用实验室的内部代码
其他
把TX2上的风扇开启
安装一下jtop
sudo -H pip install -U jetson-stats然后按5,然后按p,风扇就开启了(开到60%)应该就可以了吧
日NVIDIA Jetson Xavier NX设备上使用jtop监控GPU、CPU、内存等的使用_星空-CSDN博客
参考资料
GitHub - amov-lab/Prometheus: Open source software for autonomous drones.
https://github.com/amov-lab/Prometheus/wiki
以上是关于ROS实验笔记之——无人机在VICION下试飞的主要内容,如果未能解决你的问题,请参考以下文章