ROS实验笔记之——无人机在VICON下定点飞行
Posted gwpscut
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了ROS实验笔记之——无人机在VICON下定点飞行相关的知识,希望对你有一定的参考价值。
首先需要安装mavros
sudo apt-get install ros-neotic-mavros ros-neotic-mavros-extras
wget https://raw.githubusercontent.com/mavlink/mavros/master/mavros/scripts/install_geographiclib_datasets.sh
sudo ./install_geographiclib_datasets.sh然后编译实验室内部的飞行控制代码。里面包含了飞控代码以及修改的vicon的驱动(ubuntu20.04)
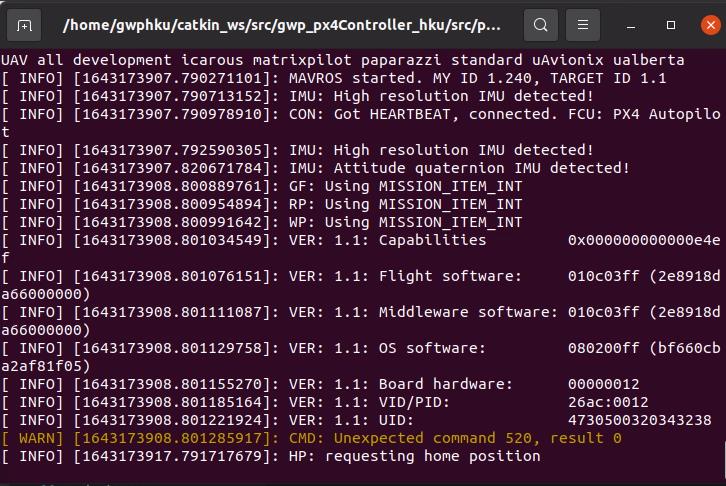
编译完成后,先看看mavros运行是否正常(注意飞控与机载电脑通过usb连接)。运行launch
roslaunch px4ctrl mavros.launch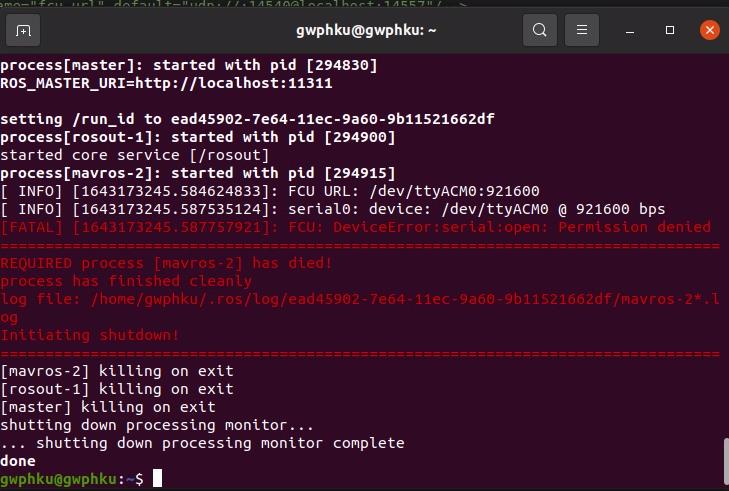
报错如上图,没有权限
注意fcu_url的修改。通过下面命令来查看设备
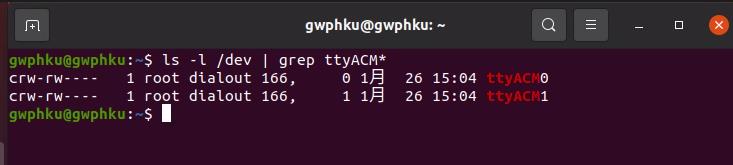
dmesg | grep tty
ls /dev然后给与串口权限
sudo chmod 777 /dev/ttyACM0
即可。
但是这样还是需要每次给予串口权限,通过下面操作来永久给予权限
sudo gedit /etc/udev/rules.d/XXXX.rules
这里的这个 .rules 的文件名 XXX 可以随意自己定义
输入:
KERNEL=="ttyUSB*", ATTRSidVendor=="10c4", ATTRSidProduct=="ea60", MODE:="0777", SYMLINK+="rename" 其中,udev的规则为:
$kernel, %k:设备的内核设备名称,例如:sda、cdrom。
这个 kernel 的名称就是你的设备在 /dev/ 路径下的名称(可以使用通配符)
例如相机是可能 /dev/video0 & /dev/video1
那么就可以写 KERNEL=="video*"
假如是某个 usb 模块,在 dev 下面为:/dev/ttyUSB1
那么就应该写成 KERNEL==“ttyUSB1”
--
保存文件即生效,然后需要重新插拔USB串口模块
以上是关于ROS实验笔记之——无人机在VICON下定点飞行的主要内容,如果未能解决你的问题,请参考以下文章