实验笔记之——四旋翼无人机的制作&试飞
Posted gwpscut
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了实验笔记之——四旋翼无人机的制作&试飞相关的知识,希望对你有一定的参考价值。
最近搭建了一台小的四旋翼无人机,本博文记录一下搭建的过程以及一些问题。
目录
组装
首先是一系列的散装原件。

到最后搭建出来的无人机模型
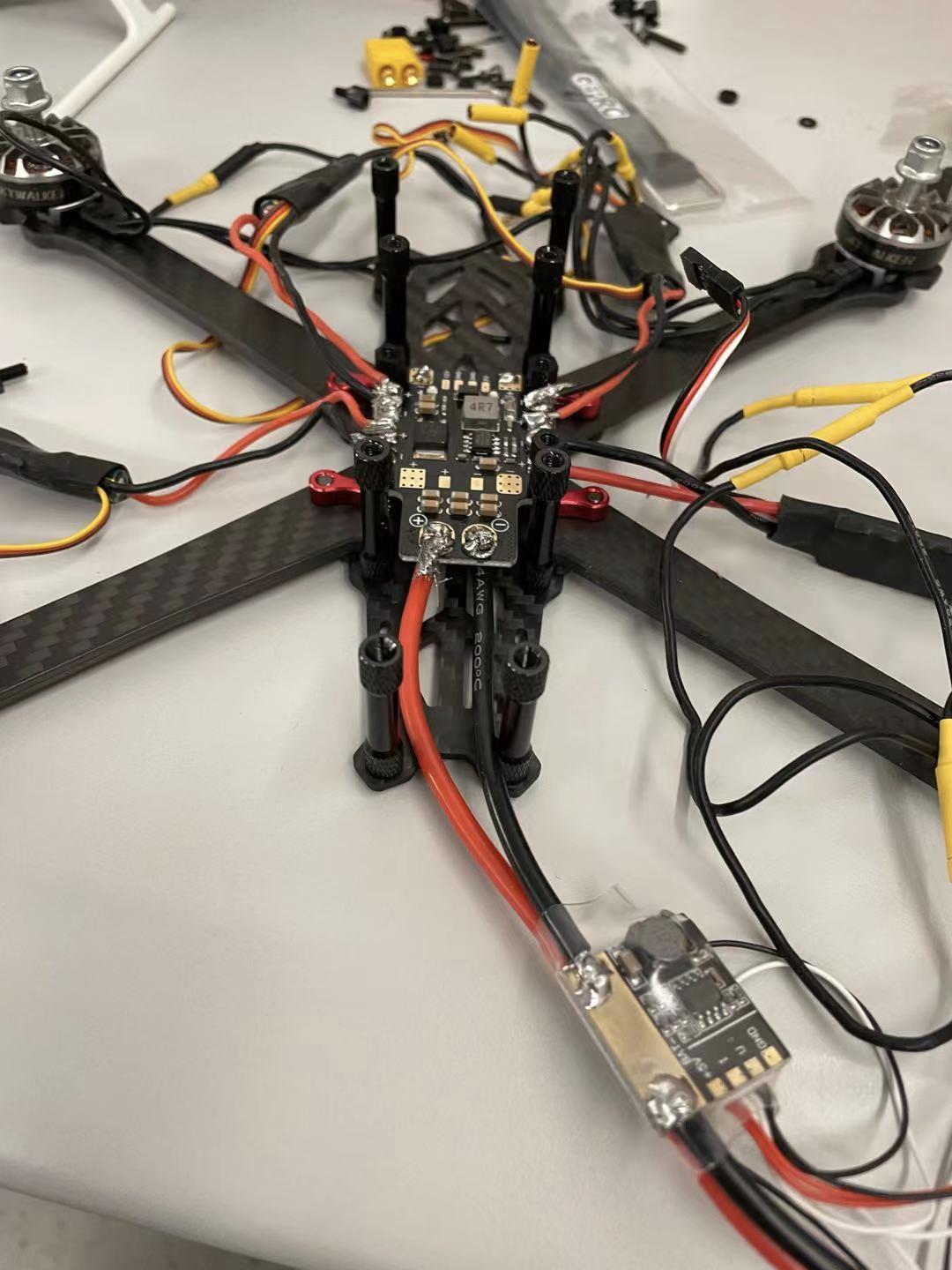
注意需要的东西有:
机架
首先拼好机架底盘,装上分电板-电源输入&分配板。至于降落架,可以用胶粘在底座上。
电调&分电板
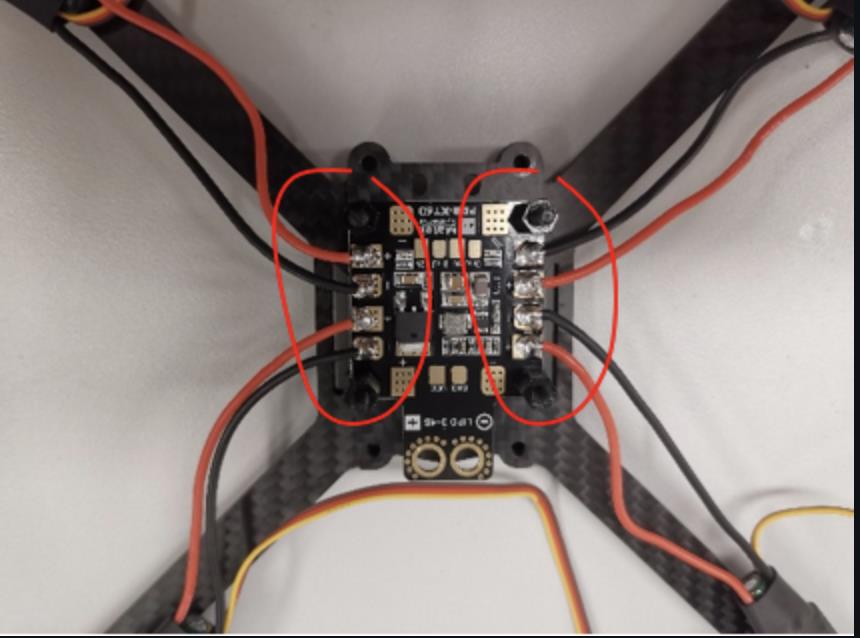
将四个分体电调电源输入线(红黑两条的)焊在分电板的图中的指定位置 。
红线(正极)焊在+处;黑线(负极)焊在-处
注意电调的大小要适配,不然就可能出现有些桨叶力比其他的小的情况~~~
电调是指下面这个东东
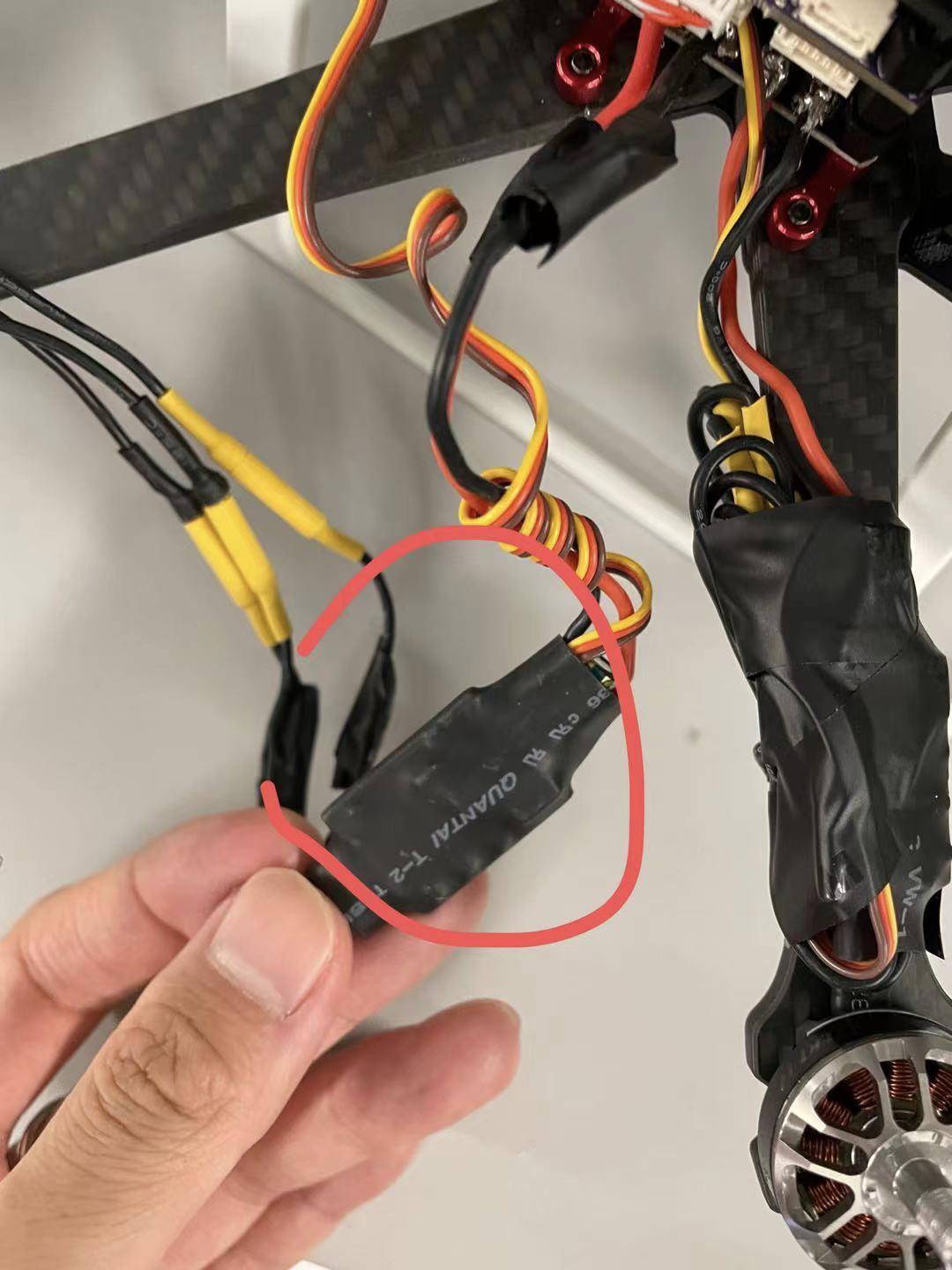
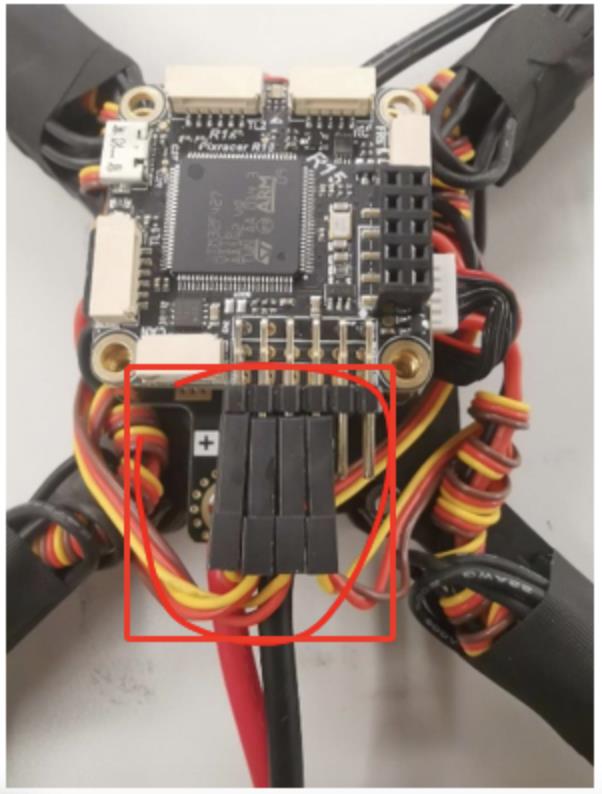
电调信号线接到pixracer的输出口(图中从左到右顺序为1-2-3-4),根据机头方向确定每个电机的电调信号线应该接到哪个输出口上
电池
电源线(电流计)焊接在上图下面电两个孔。
电流计接6-pins线到pixracer上,供电并提供实时测量的电压电流 这里可以把电流计的原装电源线去掉,换上两根细的电源线(正负要按照电流输入方向焊在近电池处),再焊在分电板的vcc+gnd(12v)上
飞控
安装飞控pixracer在分电板上层,注意要用尼龙柱安装
桨叶
陀机
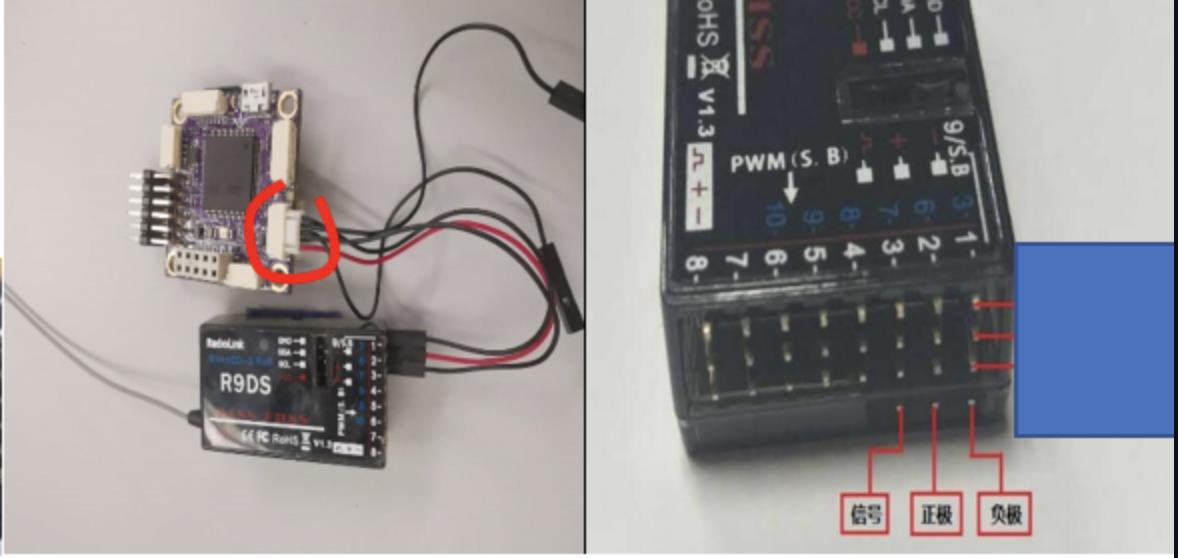
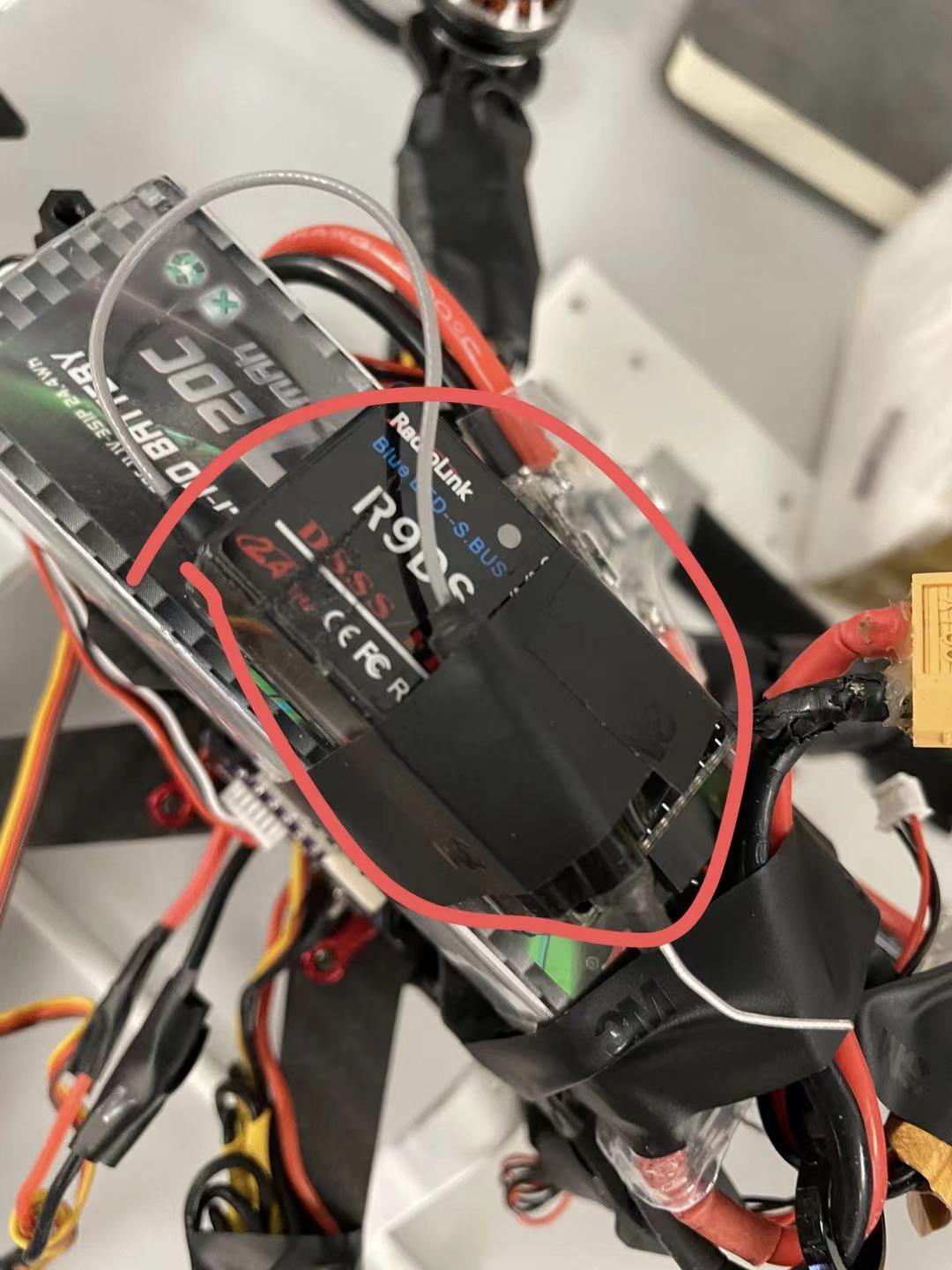
遥控接收机
R9DS遥控器接收机(SBUS模式-三根线),并接到飞控RC口处。
遥控
采用的遥控器比之前用的更加简单一些。详情请见下面的飞行前遥控器配置。
飞行前准备
遥控器的配置
采用的遥控器与之前博客使用的不太一样。长下面这样的:

唯一不一样的是,油门杆不会自动跳,就是需要没有弹性,其他设置都差不多。
- Arm:左边推杆打到最右下角,保持2s,启动电机,此时是最小转速
- Disarm:左边推杆打到最左下角,保持2s,关闭电机
- Kill Switch:在QGC里设置的按键,最左上角的拨杆,有紧急关闭电机的作用
- 方向角控制:右边推杆分别控制Pitch、Roll角度,左边推杆的左右方向控制Yaw角度
至于遥控与发射机的对码则简单多了。
和遥控器对码:每个发射机都有独立的 ID 编码。开始使用设备前,接收机必须与发射机对码。
对码完成后,ID 编码 则储存在接收机内,且不需要再次对码。
a、将发射机和接收机放在一起,两者距离在一米以内。
b、打开发射机电源开关。R9DS 接收机将寻找与之最近的的遥控器进行对码。
c、按下接收机侧面的(ID SET)开关 1 秒钟以上,LED 灯闪烁,指示开始对码。
d、当指示灯停止闪烁,对码完成
然后需要保证陀机的转向是对的。通过遥控器解锁飞机,然后观察转向。
无桨叶下,调试飞机的陀机
注意,其转向需要符合下图所示的规则
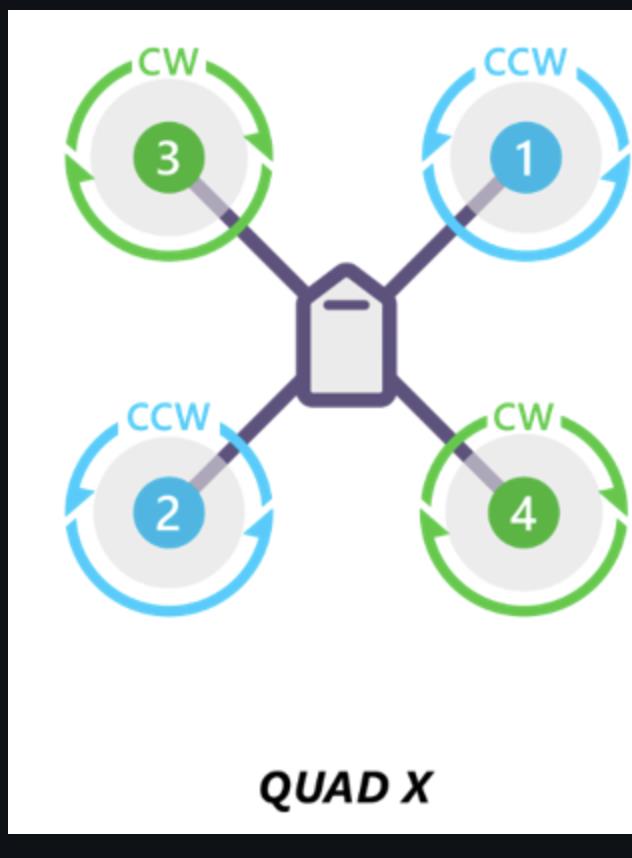
若方向不一,只需要将对应陀机与电调中的两根线换一下即可。(三相电机,更换其中两根线,即可改变电机的旋转方向)
然后进行QGC上位机调试飞控与校准。具体可以参考博客《ROS实验笔记之——JCV-450无人机初入门》
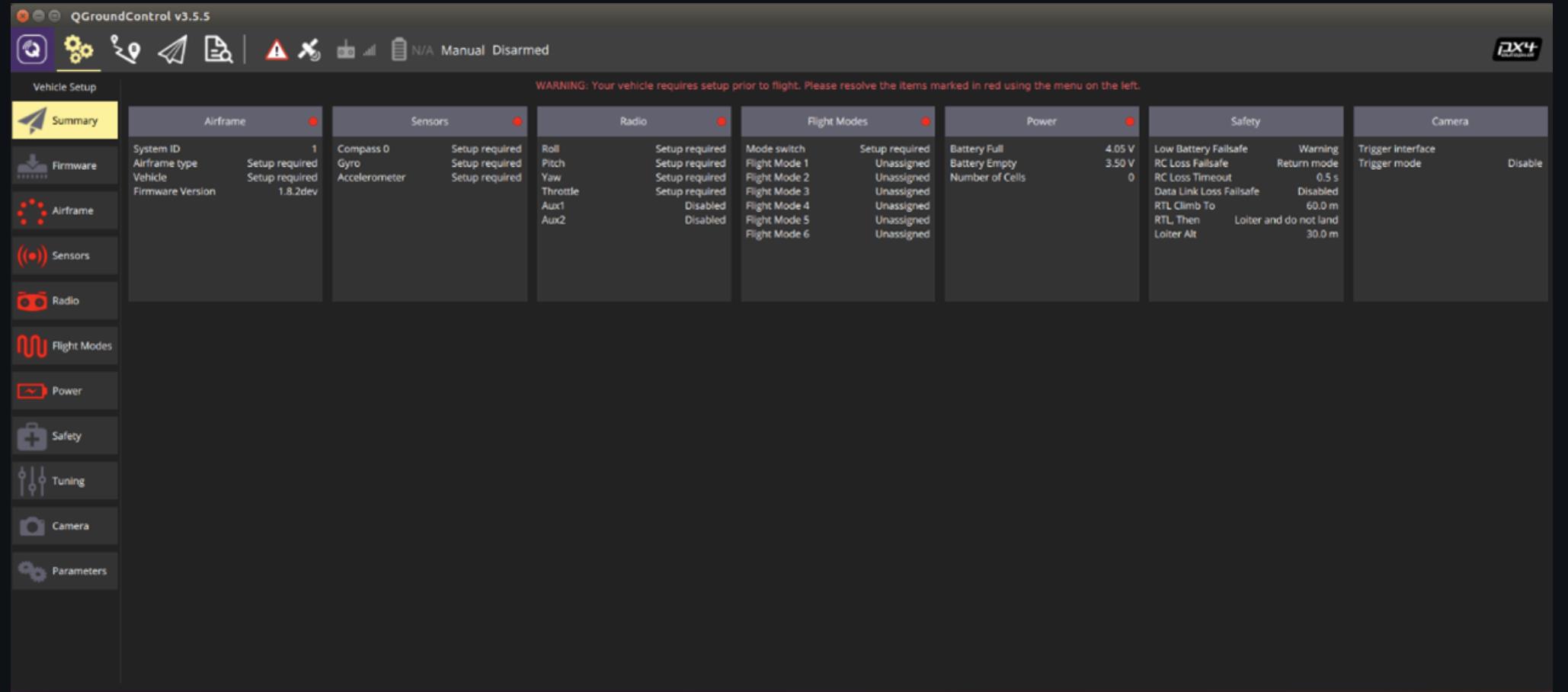
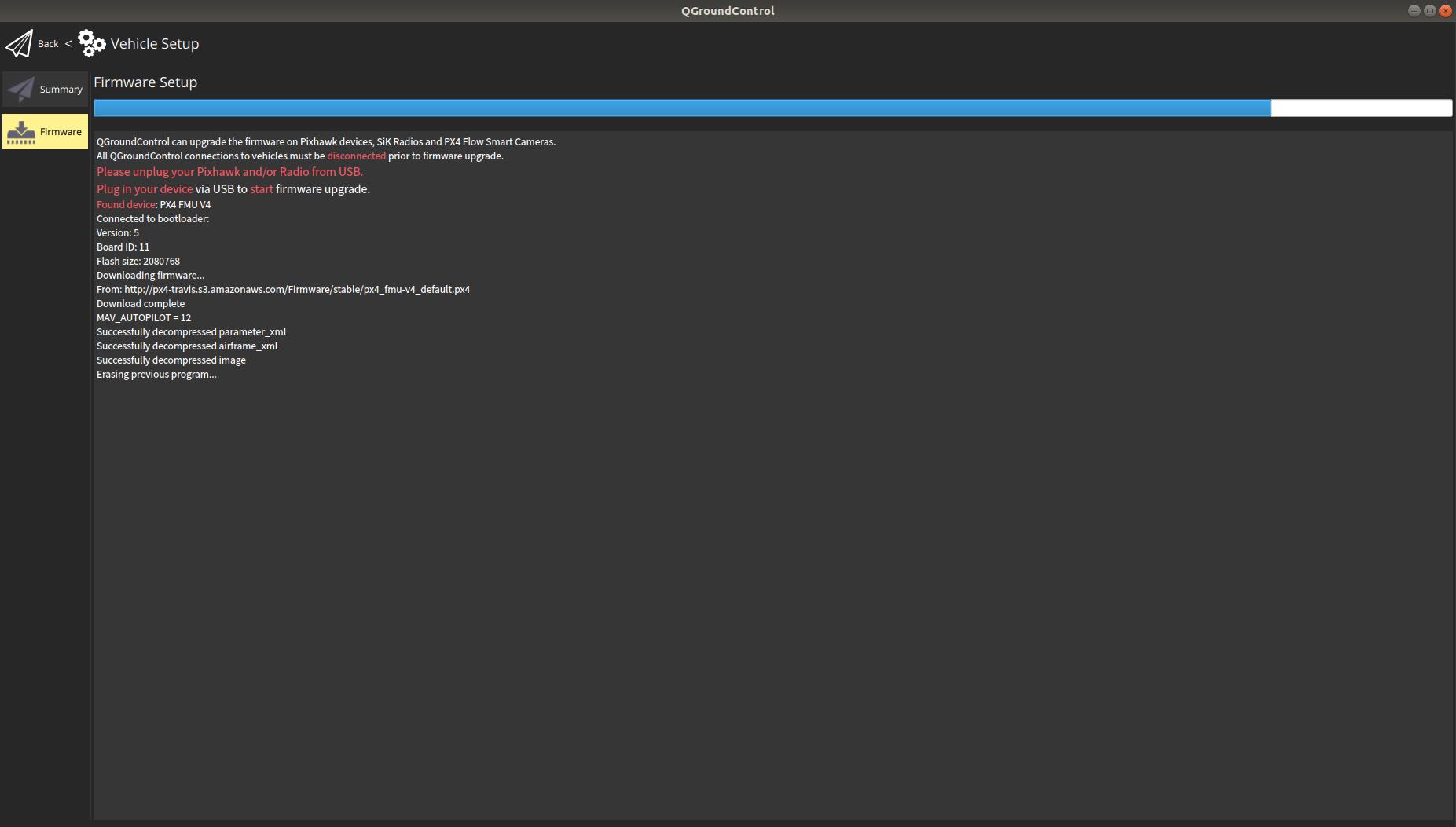
1.接好USB线,电脑和飞控
2.进入Firmware,下载飞控固件代码,拔掉USB线再插上,出现下载栏并点击ok
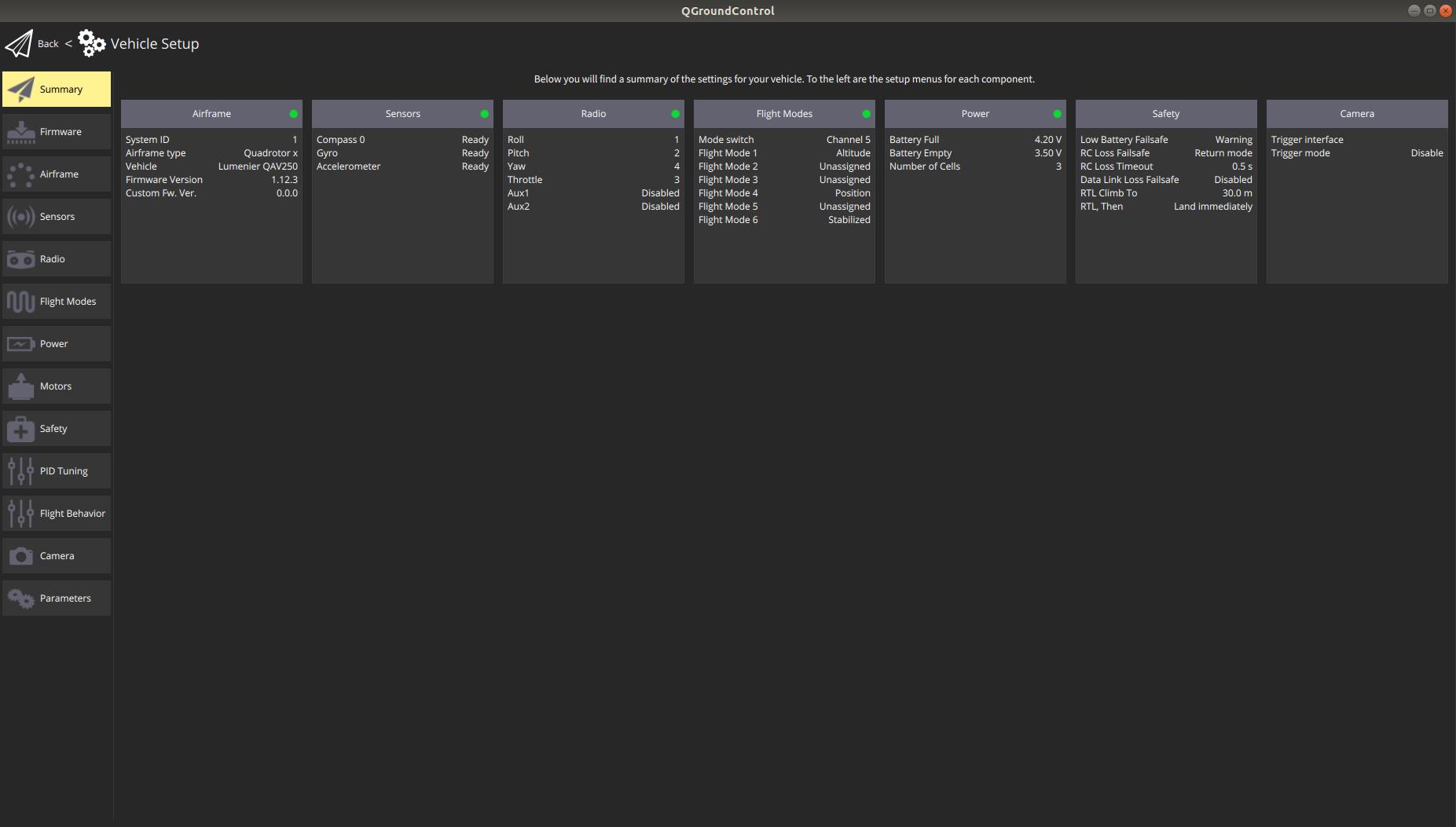
3.选择机型,这里本人选择了LumenierQAV250,需要根据实际情况设置
4.传感器校准。这个在博文 《ROS实验笔记之——JCV-450无人机初入门》 已经介绍过。按照QGC里面的步骤进行即可
5.调试遥控器,直接点击calibrate,然后按照提示操作即可
6.设置飞行模式,注意确保有kill的功能以及降落的功能
7..接入电池,校准电池电压,点击calculate,然后等待其自动完成
8.校准电调,先拔掉电池,点击ESC PWM下面的calculate
最终调试完就可以开始试飞了~
试飞
试飞的话比较讲究对飞机的精准控制,本人目前控制还不是很好,在炸机边缘疯狂试探中hhh
飞行时必须要注意安全。
以上是关于实验笔记之——四旋翼无人机的制作&试飞的主要内容,如果未能解决你的问题,请参考以下文章
matlab simulink四旋翼无人机模糊PID控制姿态