matlab simulink四旋翼无人机模糊PID控制姿态
Posted studyer_domi
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了matlab simulink四旋翼无人机模糊PID控制姿态相关的知识,希望对你有一定的参考价值。
1、内容简介
略
532-可以交流、咨询、答疑
2、内容说明
四旋翼无人机控制灵活、安全性能较高,能够实现空中悬停、翻滚、任意角度横 向飞行,常常替代人们从事高空危险作业,给我们的生活与工作带来了很多便利。本 文主要对四旋翼的姿态控制现状进行了研究,结合四旋翼的飞行环境与控制特征,建 立一种串级的模糊 PID 控制模型,并对四旋翼无人机的串级模糊 PID 姿态控制算法 进行验证。
四旋翼是一个多变量、欠驱动、强耦合的非线性控制系统,而一种控制方法又不 能满足四旋翼的控制需求,通常采用多种控制方法相结合,相互弥补四旋翼在姿态中 之中的不足,尽可能使四旋翼在稳定性、准确性和抗干扰能力等方面都有一定的提升。 针对经典 PID 控制参数整定困难,参数不能自适应的改变和四旋翼飞行中易受外界环 境干扰等问题,采用串级控制与 PID 控制器相结合,组成四旋翼姿态控制中最常用的 串级 PID 控制方法来控制四旋翼,再把模糊控制与串级 PID 控制相结合组成一种改 进的串级模糊自适应 PID 控制模型。
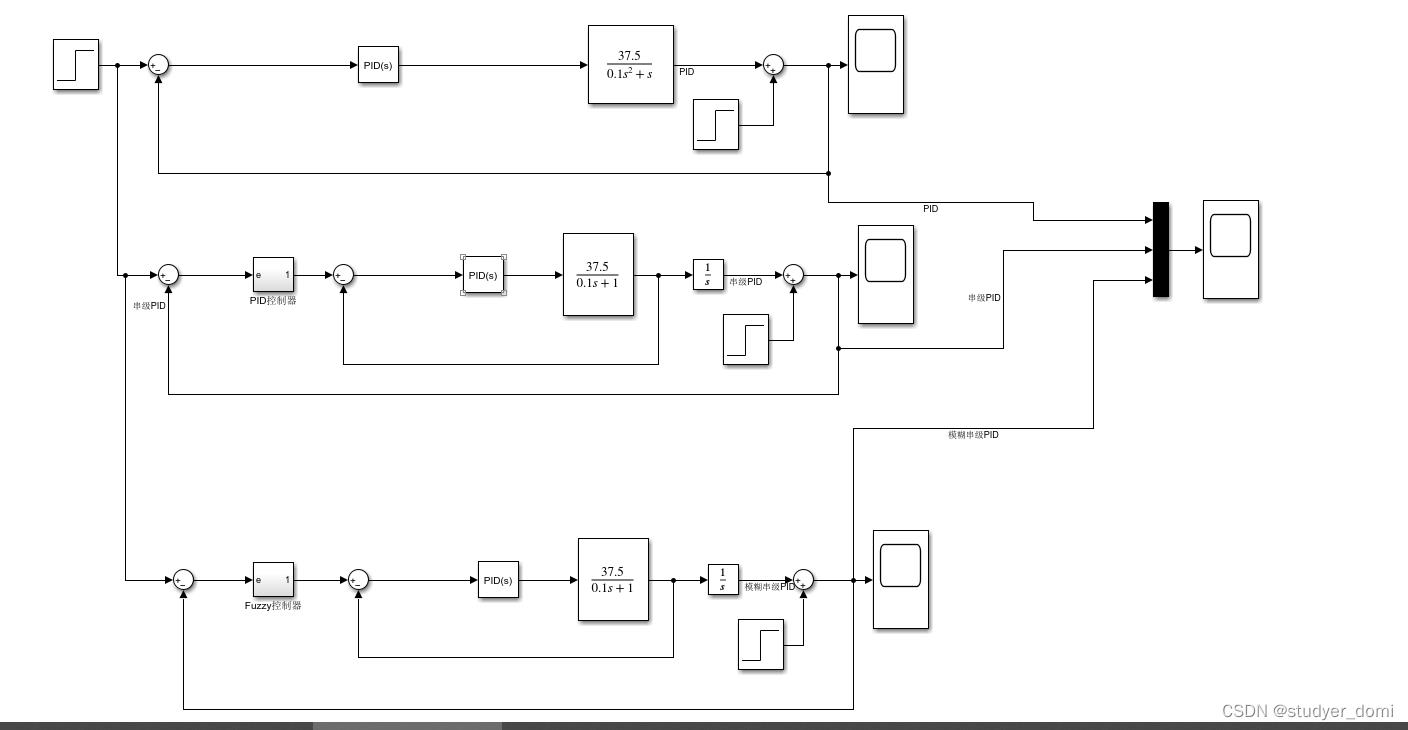
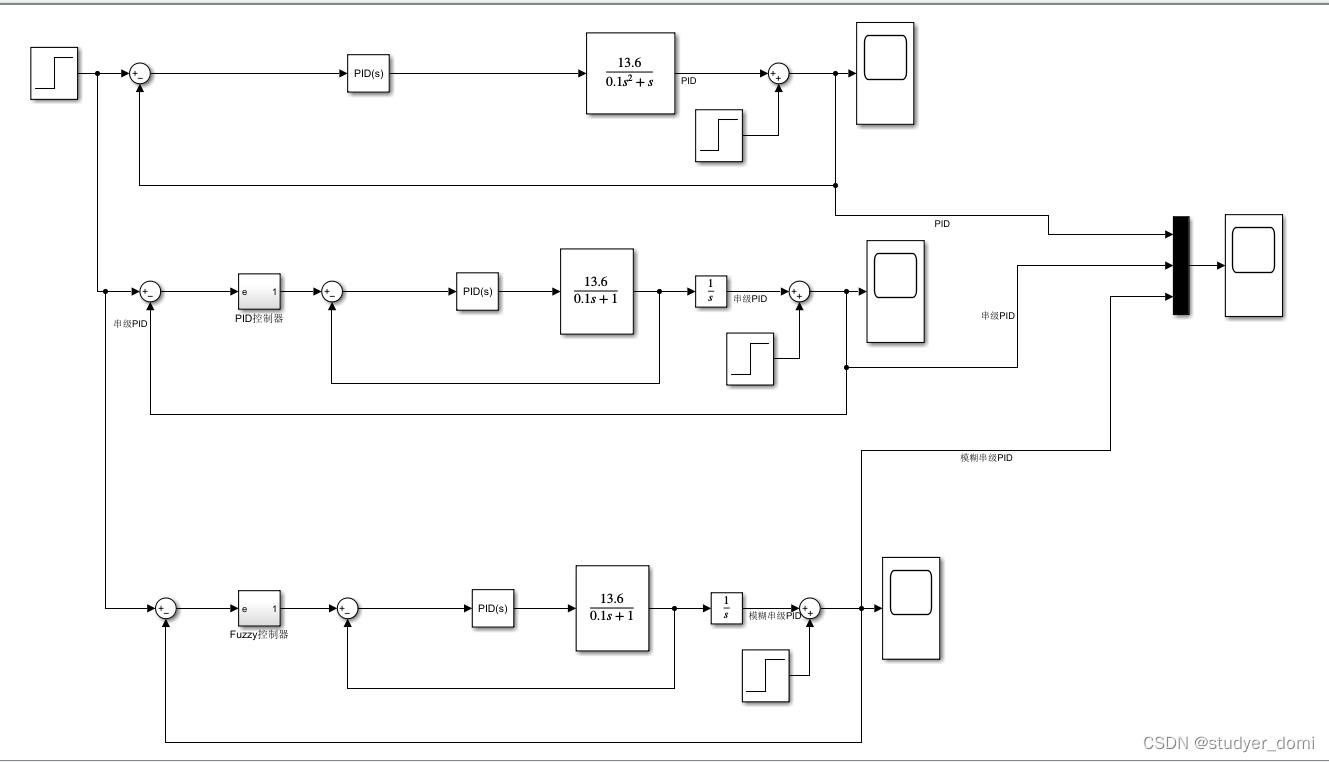
该方法以模糊数学为理论依据,通过建立四旋翼控制系统数学模型,经过四旋翼 姿态解算,在经典 PID 控制和串级角度 - 角速度控制的基础上设计串级模糊 PID 控制 器,实现对四旋翼 PID 控制系统参数的自我修正与在线调整。为了确定控制方法是否 可行,分别对经典 PID 控制方式下、串级 PID 控制方式下与串级模糊 PID 控制方式 下的四旋翼的稳定性、响应性与抗干扰能力进行 Simulink 软件仿真与实验。通过仿 真显示,三种控制方式各有其优缺点,在图像与数据综合比较下,串级调解下的模糊 PID 控制优于 PID 控制与串级 PID 控制,四旋翼控制系统的响应时间、稳定性、准确 性和抗干扰能力等方面均有所提升。
关键词:四旋翼;姿态控制;串级 PID 控制;模糊控制;自适应
3、仿真分析
4、参考论文
四旋翼无人机模糊PID姿态控制研究
四旋翼无人机姿态控制研究
以上是关于matlab simulink四旋翼无人机模糊PID控制姿态的主要内容,如果未能解决你的问题,请参考以下文章