ROS实验笔记之——JCV-450无人机初入门
Posted gwpscut
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了ROS实验笔记之——JCV-450无人机初入门相关的知识,希望对你有一定的参考价值。
最近购买了阿木实验室的JCV-450无人机。本博文记录本人使用及实验的过程
目录
关于遥控器,请参考下面的教程
富斯i6s遥控器操作基本介绍
基本设置
首先开箱后发现里面的东西好像并不多。。。如下所示

无人机上面圆圆的是GPS模块,然后需要把螺旋桨都安装上去。注意螺旋桨有两个白色的和两个黑色的,对应的安装上去。

然后通过数据先链接无人机和电脑,打开QGC。注意此处先使用windows版本的
(链接:https://pan.baidu.com/s/1dBEVSqlIpuy4lNAdgo6DFQ
提取码:3rd7
--来自百度网盘超级会员V5的分享)
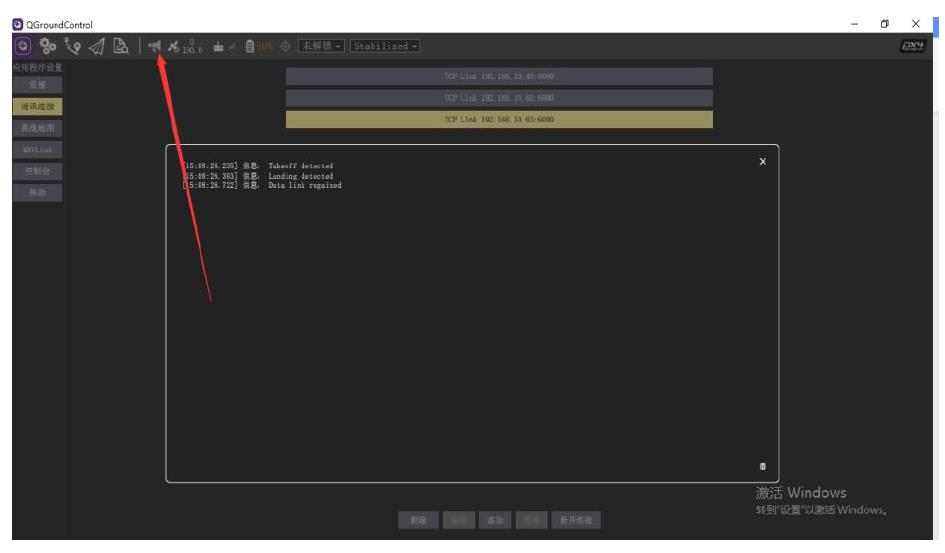
通过数传连接无人机
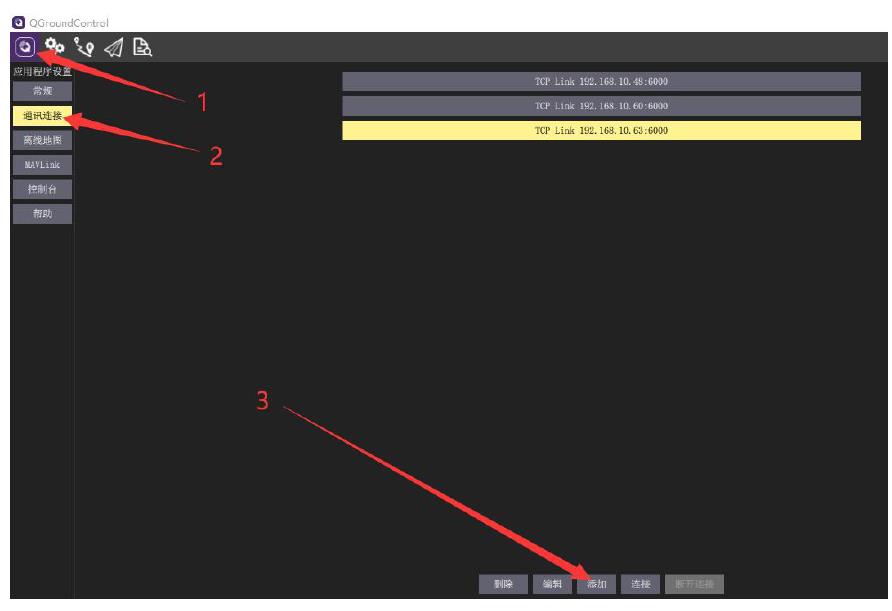
选择TCP,IP 地址,波特率,(根据飞机上填写)填好之后点击下方确认。
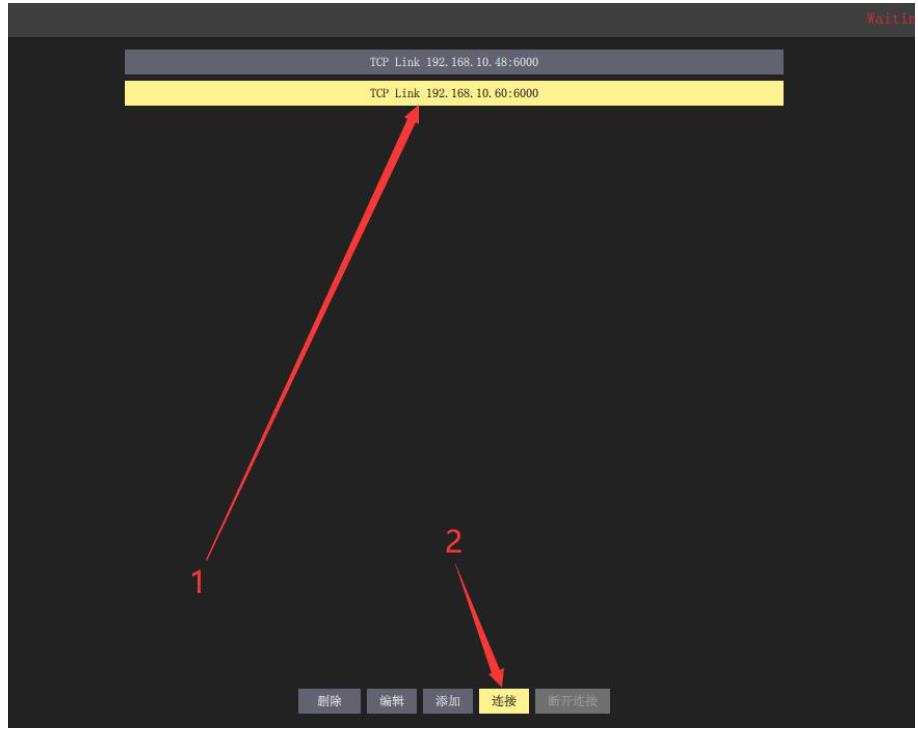 绿色读条表示正在载入数据。
绿色读条表示正在载入数据。
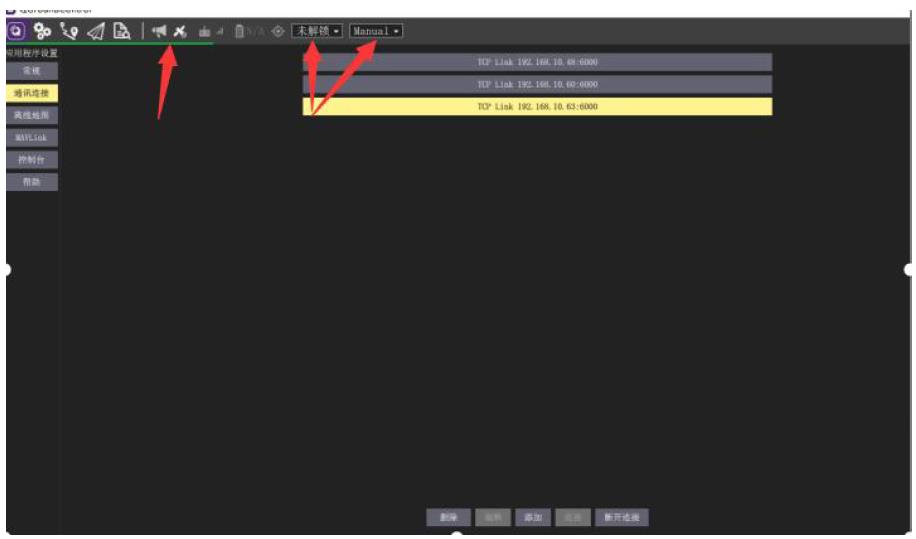
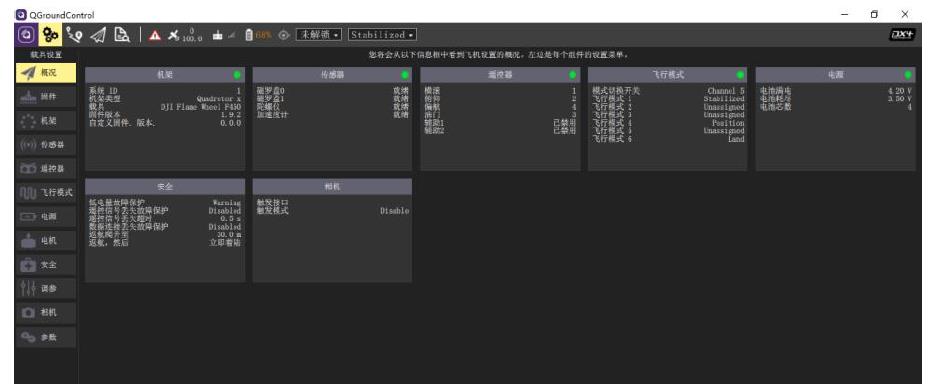
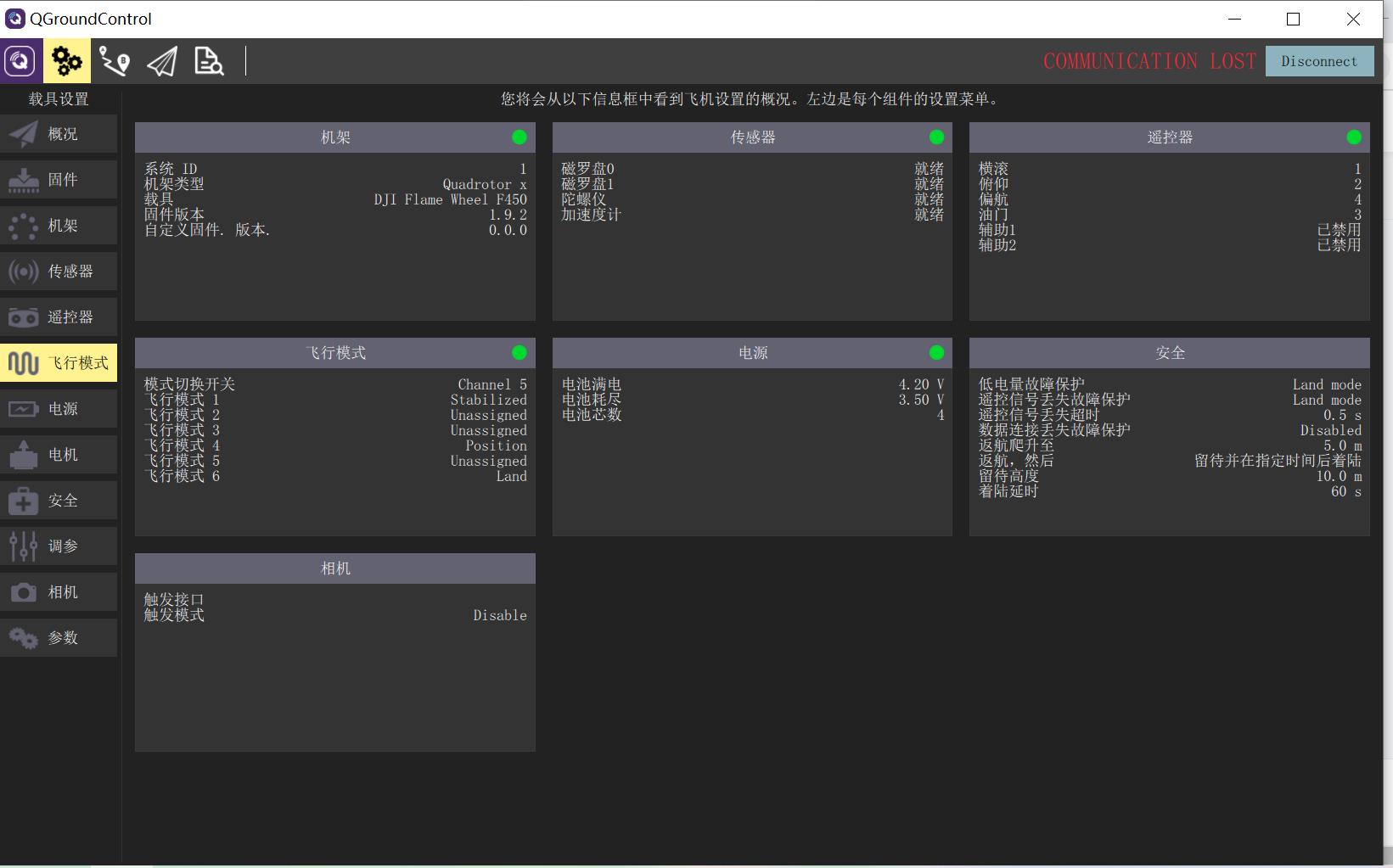
成功连接后查看概况,绿色表示正常,红色表示错误,无红色错误则测试无人机是否能解锁。(测试是否能解锁时请勿安装螺旋桨)
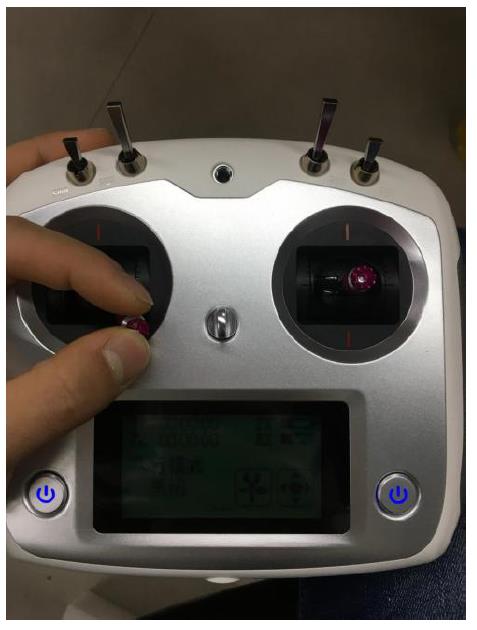
将左手拨杆拉到右下角,即为内八解锁无人机(测试是否能解锁时请勿安装螺旋桨)
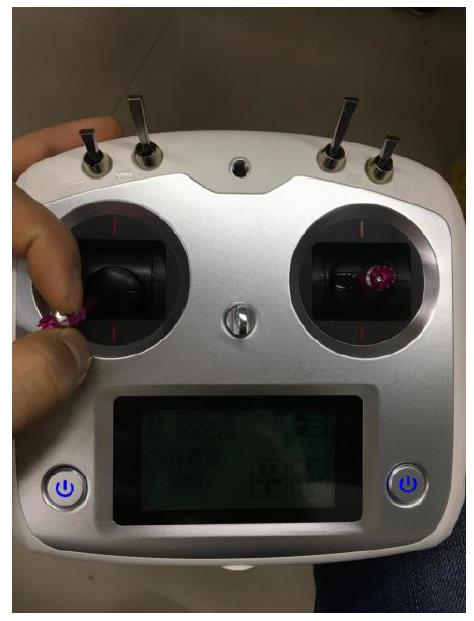
将左手拨杆拉到左下角,即为外八上锁
如不能解锁,点击这里查看飞控报错内容,并根据报错内容,校准或设置
能解锁之后则进行试飞,飞行前一定检查当前模式是否是我们要使用的模式。遥控器上我们默认SWC拨杆为飞行模式开关,1、最上面为自稳飞行模式(自稳飞行模式难度较高,不建议没有开源飞控飞行经验人士使用),2、中间为定点飞行模式(定点模式需要GPS 的支持,需要在室外开阔,GPS 信号良好的情况下使用,飞行前查看飞行模式是否能成功进入position 飞行模式),3、最下面为降落飞行模式,(在有GPS定位信息情况下,进入该模式无人机会立即自动降落,建议新手尽量在定点模式下飞行。飞行前需要了解无人机飞行基础控制原理)试飞时请合理使用我们配备的安全绳。
一些测试的截图~
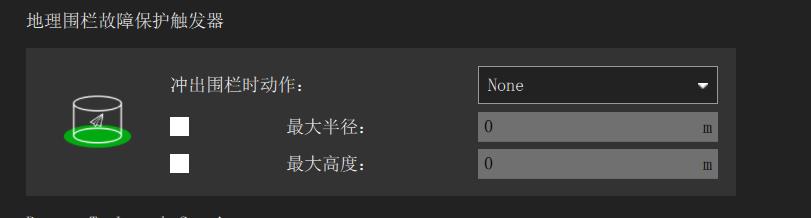
注意,在室内飞的时候,需要有GPS,故此需要把地理围栏删掉。否则就会报错。室内环境下解锁无人机,报错:Not arming:geofence RTL requiers valid home
然后就可以解锁成功了,但是当解锁完后,会发现飞机飞得特别的猛hhh,绑在椅子上瑟瑟发抖。。。。接下来找时间到室外去飞一下看看
注意:请确保通读所有设置,不然直接飞行可能会造成事故,以及飞行期间,尽量往人少的地方,安全第一!!!
注意点
1、电池只能通过插拔来断电
2、遥控器尽量不要恢复出厂设置,不然需要重新跟接收器进行对码
3、飞行前,请先按下一个section的设置
飞行前调试
一、加载固件
打开电脑QGroundControl

将飞控通过USB线连上电脑,右边会检测出飞控根据提示选择自定义固件。也就是加载电脑上的本地固件。固件也可以在PX4官网下载。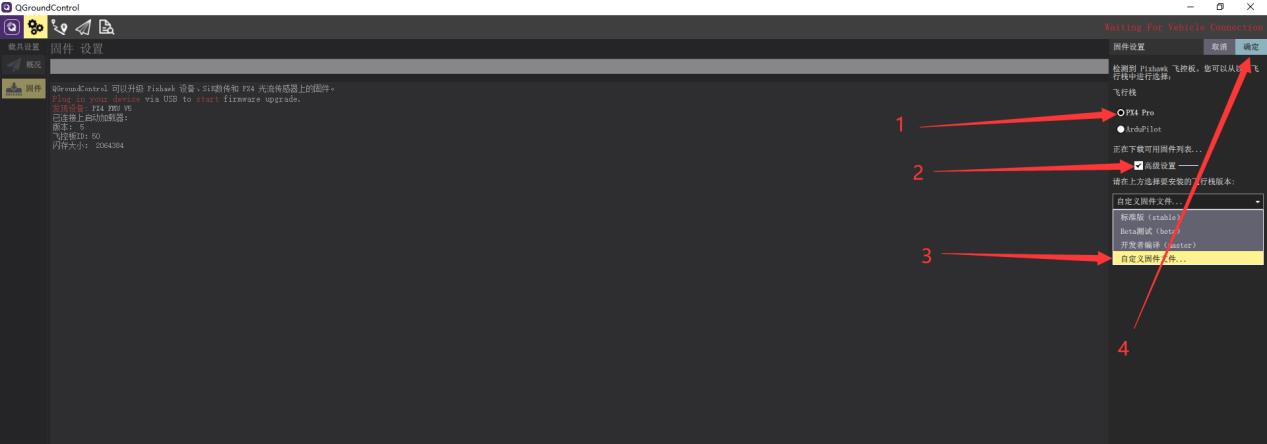
点击确定后会弹出选择文件。根据路径选择打开,(固件都在桌面的固件文件夹内)
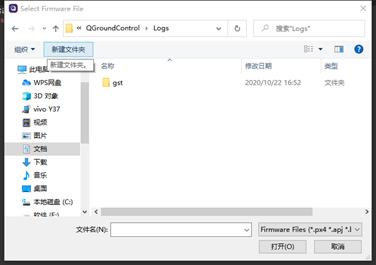
直接点击确定下载,软件会为您下载最新固件(根据客户需要来选择)
加载固件完成后会提示升级完成,等待音乐播放完成后,飞控会自动连上电脑QGC,如不能连上则可能是飞控固件加载错误。则重新加载,(也有可能是飞控上搭载设备太多导致飞控供电不足无法正常启动)
二、加载参数
飞控连上QGC后根据如图步骤加载相应的参数。
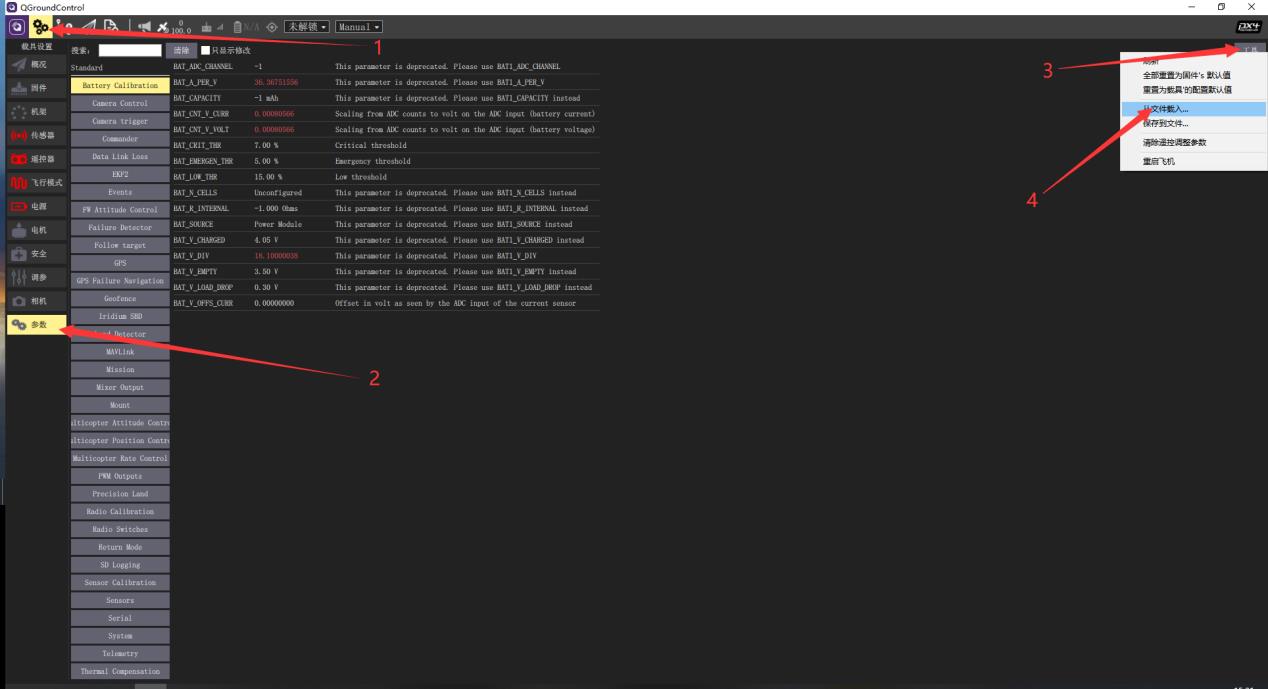
加载之后由于飞控差异可能会出现些参数错误。多导入一两次,保证参数导入成功。
然后查看概况,查看机型,固件版本,飞行模式电源是否有报错,无报错则进行下一步。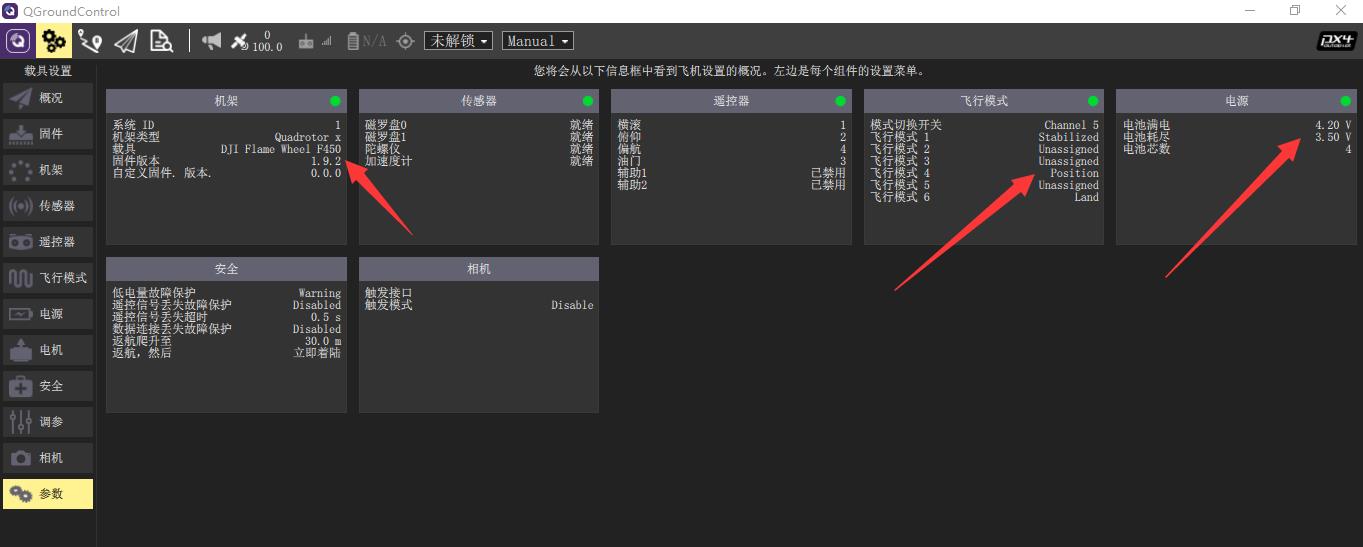
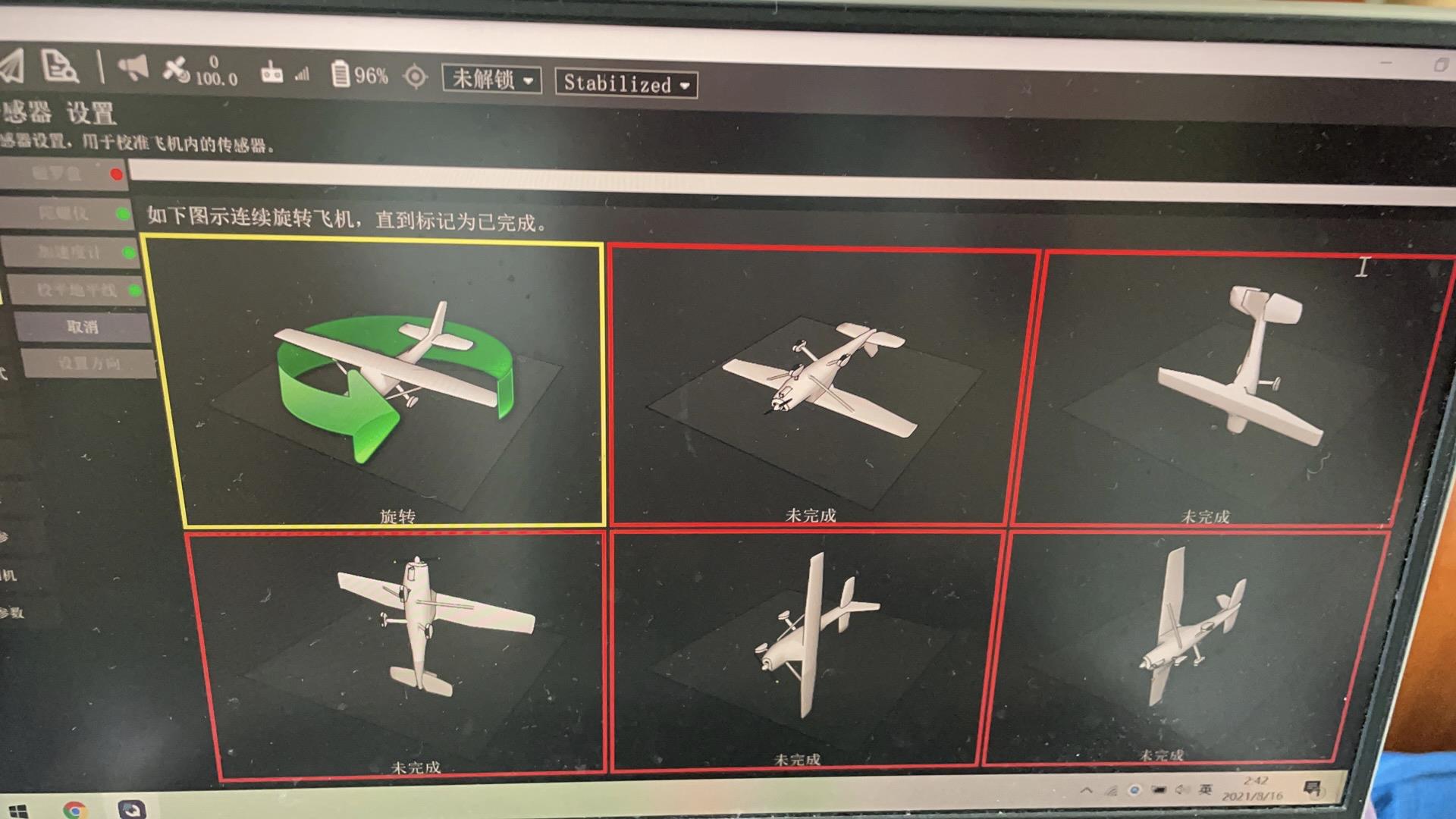
三、校准传感器
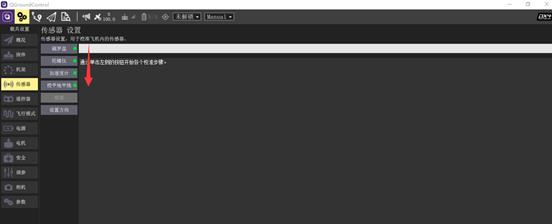
从上到下依次按图所示校准磁罗盘、陀螺仪、加速度计、地平线。(注意陀螺仪校准时飞控应保持静止)
四、遥控器校准
将遥控器中系统设置→输出模式设置为PPM,功能设置→辅助通道将5通道设置到SWC,6通道设置到SWD(如果不改成PPM模式的话QGC里就接受不到遥控器的通道反馈)



接收机短接后上电,接收机会进入对码模式,然后将遥控器进入对码模式,遥控器搜索到处于对码模式的接收机就会进行对码,成功后提示对码成功,对码成功后拔掉短截线。


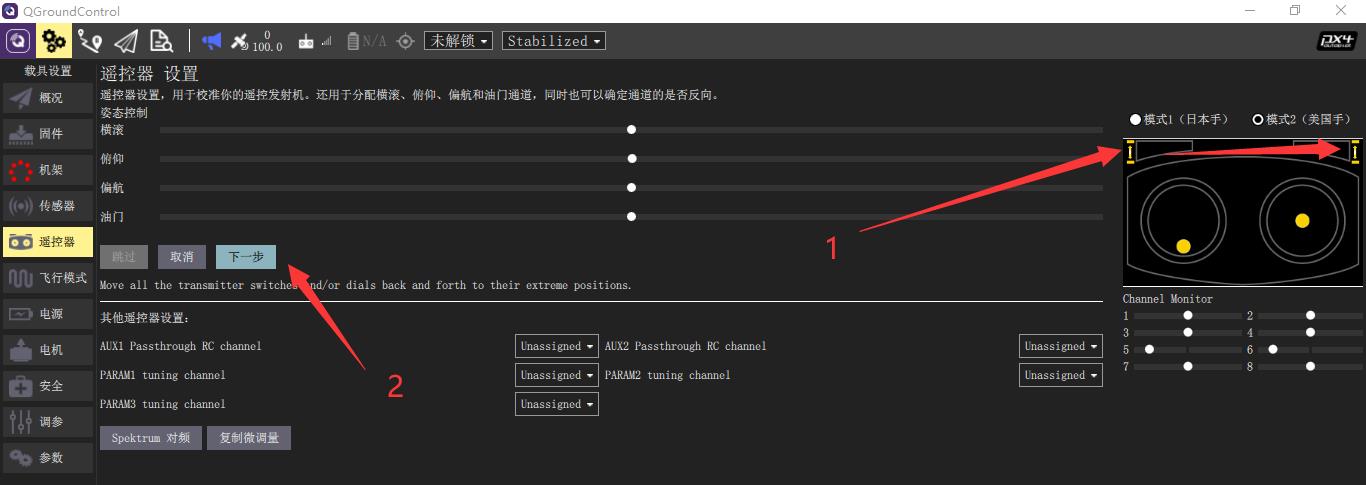
然后点击校准,然后点击右上角确认(注意这里还要点击下一步,看到 2所指摇杆到上方便可根据图示波动遥控器拨杆完成校准。
看到1所致图示出现,波动上面设置的5通道SWC ,6通道SWD开关查看反馈是否正常。没问题则点击下一步,直到完成
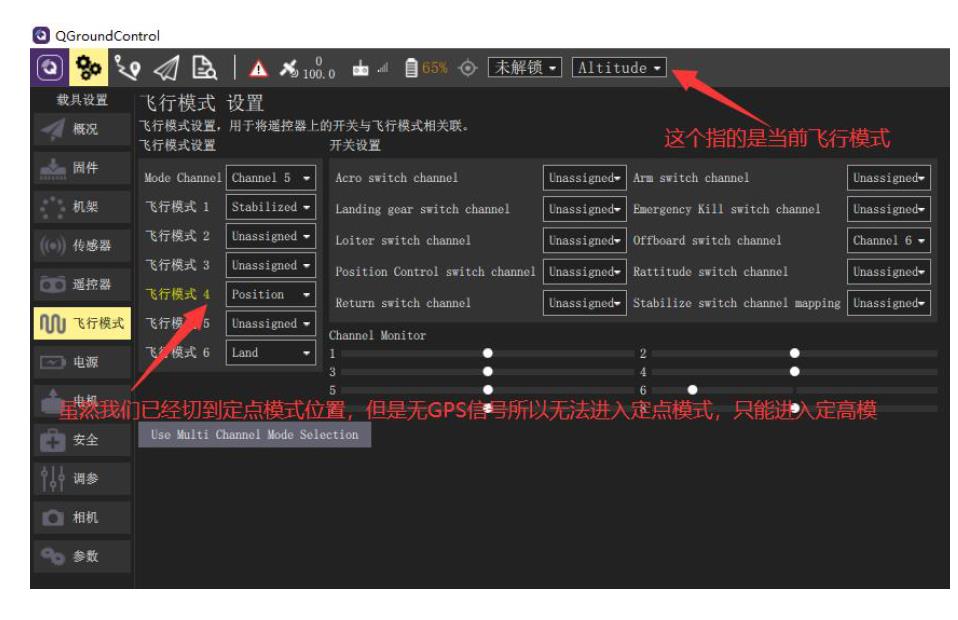
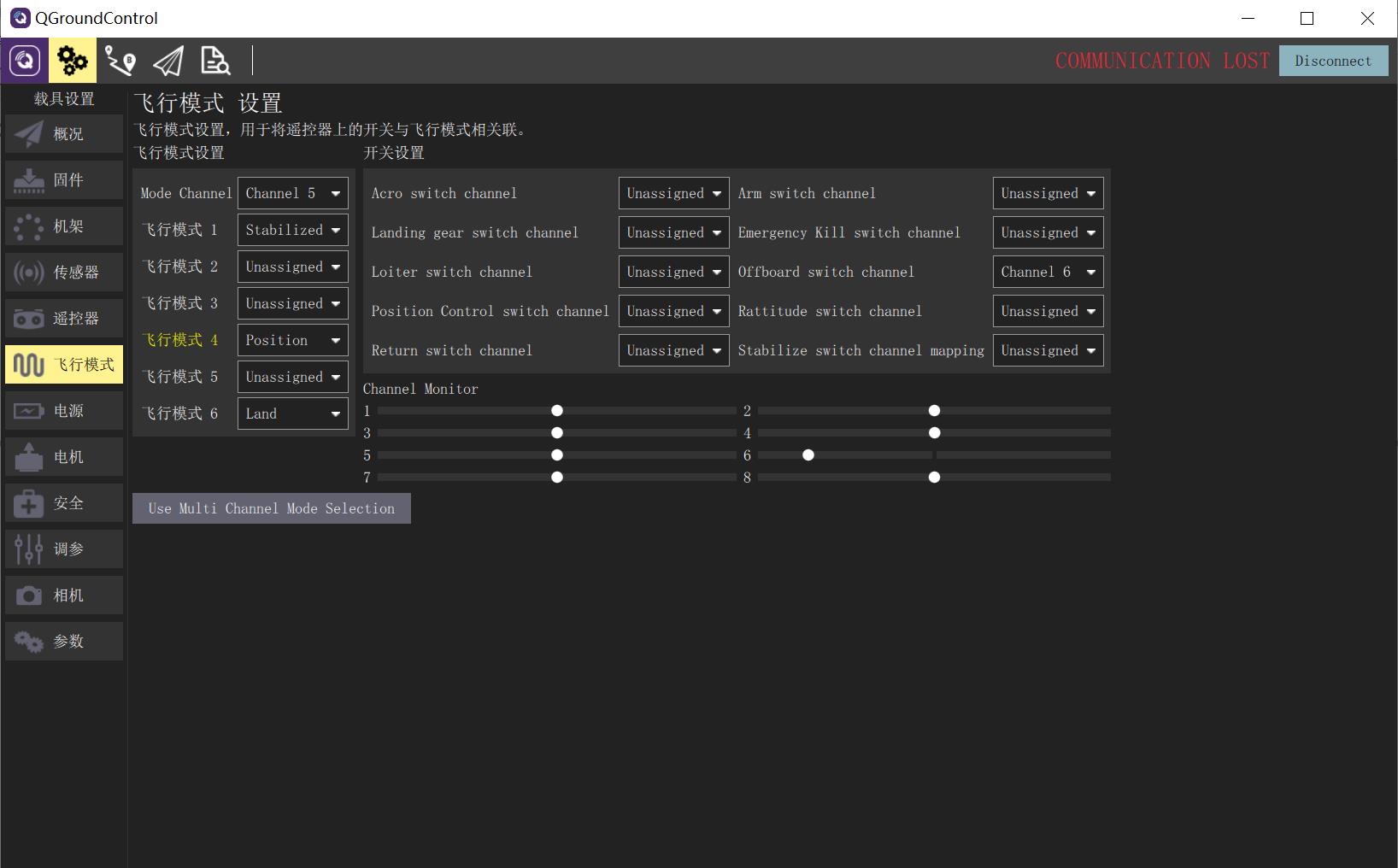
五、飞行模式
查看箭头的位置是否和下图相同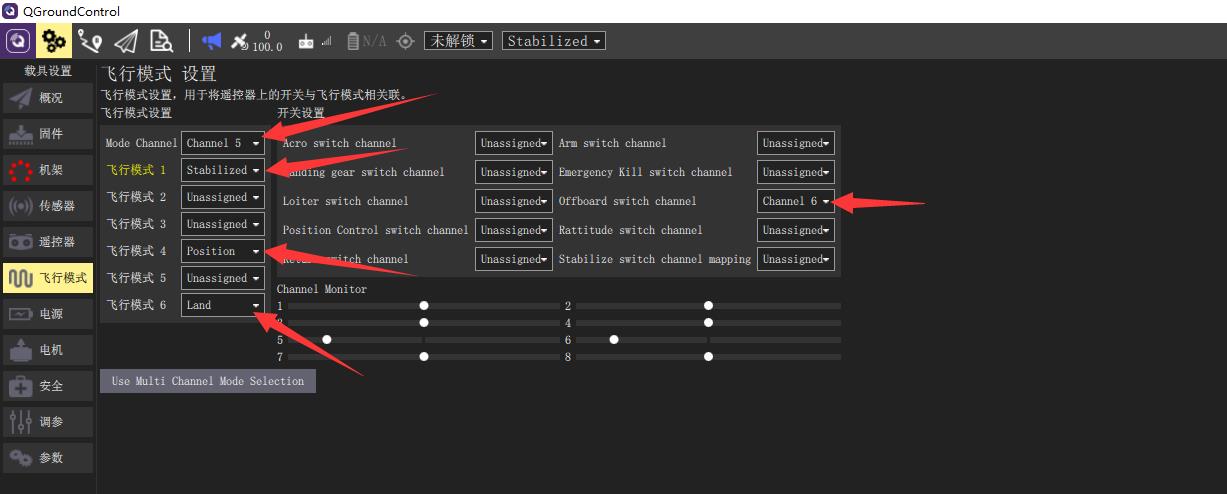
六、电调校准
根据提示连接电池,开始校准电调,待音乐播放完后点击ok,完成电调校准。(注意校准电调时一定取下螺旋桨)

重启飞机保存刚刚校准参数,尝试解锁无人机查看电机转向和转速时候正确正常, 如不能解锁,则点击1 查看报错信息,找到相应解决办法。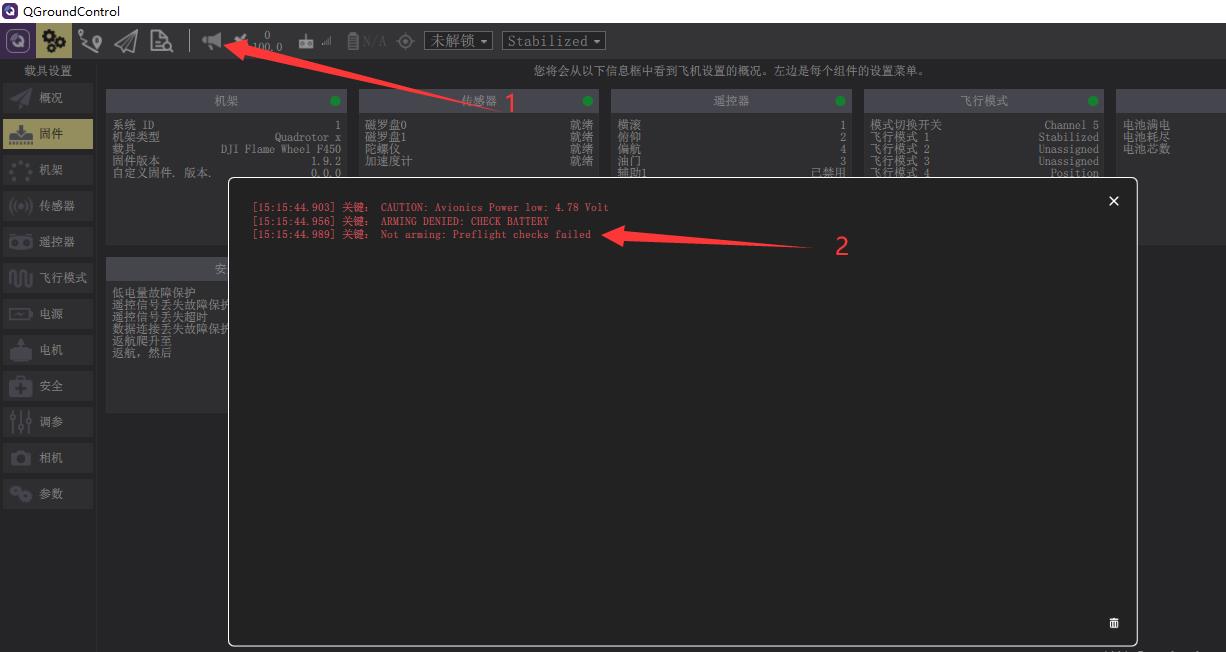
七、检查参数
这
个参数为定位来源,用雷达或者T265进行室内定位时需要勾选
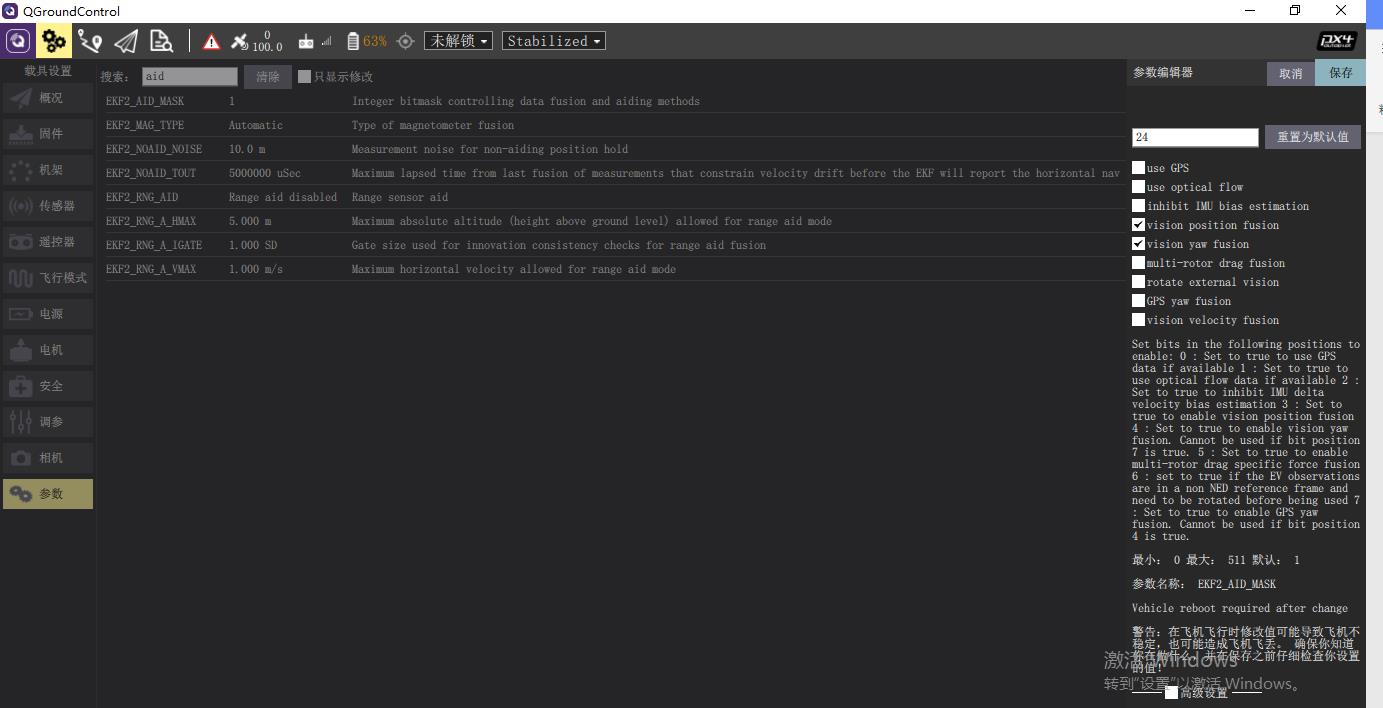
如在室外用GPS定位则勾选上图use GPS
(这个参数没有更改可能出现的问题为T265运行成功,所有节点不报错,但是任然不能切入定点模式。)
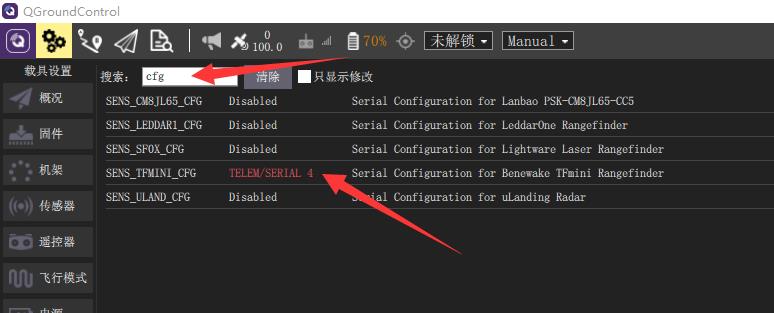
该参数为高度来源,飞行情况来选择气压计,GPS,激光雷达,视觉,(如有TFmini,默认选择激光雷达)
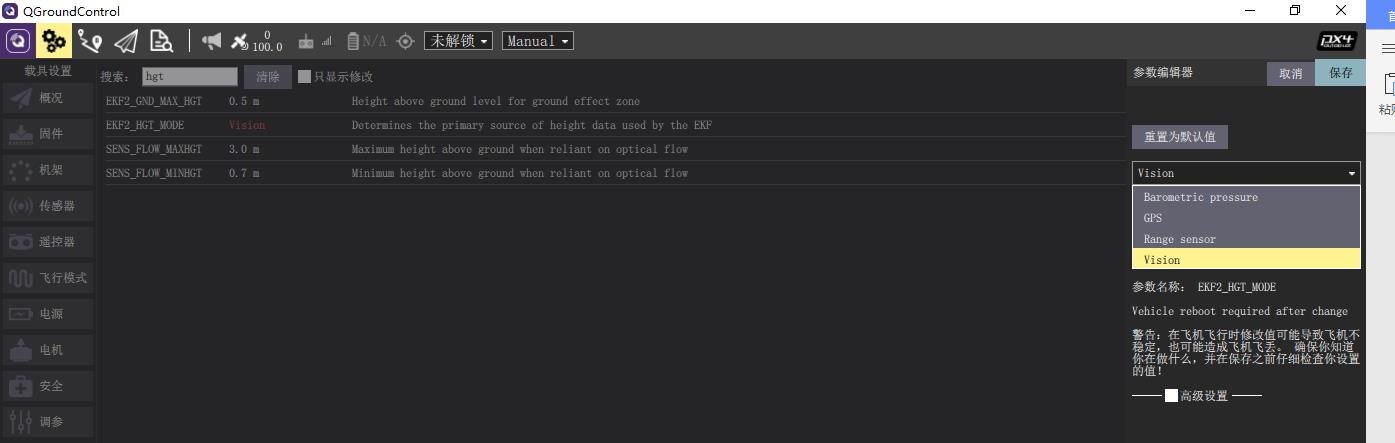
这个参数为TFmini连接的串口,我们一般默认为Telem4
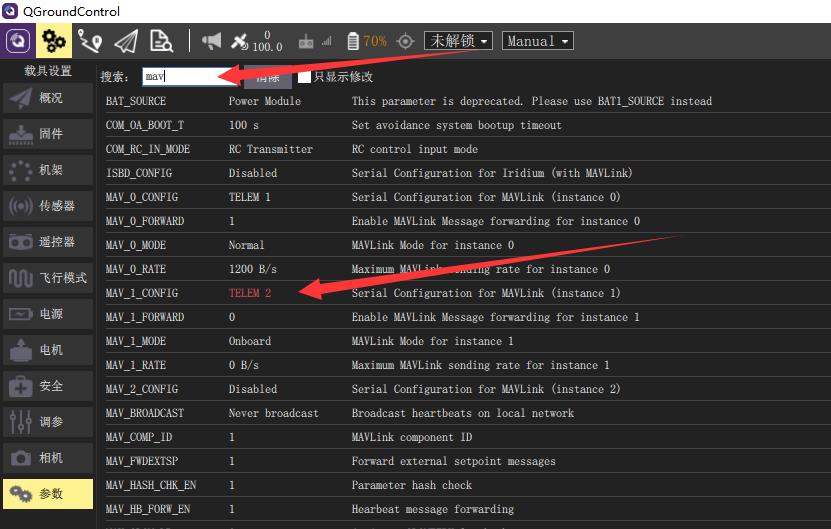
这个参数为飞控和板载电脑的通讯串口,我们一般默认插在T2,
到此,无人机的配置基本完成~
QGC的使用
教程可参考:https://docs.qgroundcontrol.com/master/en/index.html
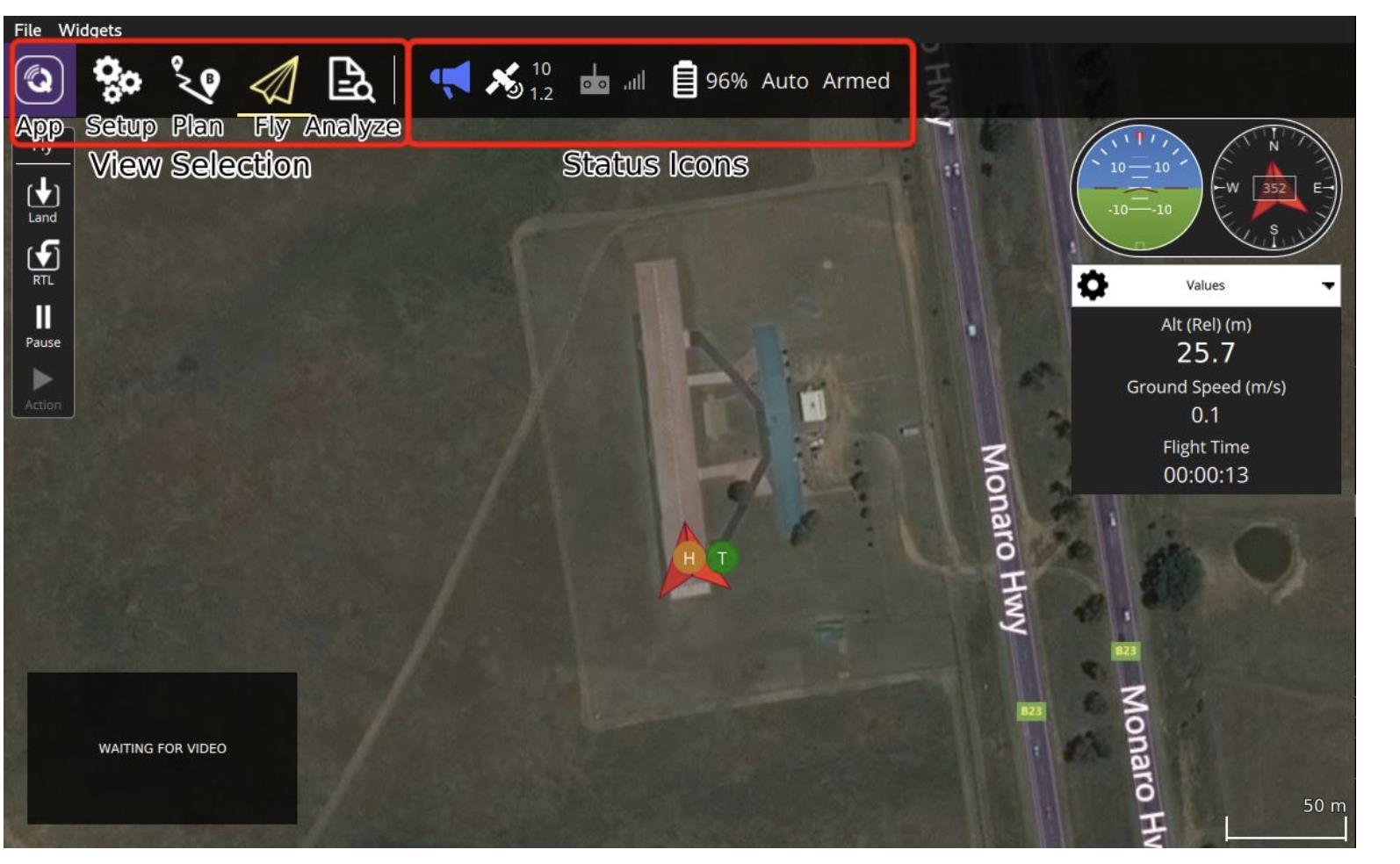
各个图标的意义如下:
 Settings
Settings
Configure the QGroundControl application.
 Setup
Setup
Configure and tune your vehicle.
 Plan
Plan
Create autonomous missions.
 Fly
Fly
Monitor you vehicle(s) while flying, including streaming video.
 Analyze
Analyze
Download logs, geotag images from a survey mission, access the MAVLink console.
Status icons
Status icons are displayed when QGroundControl is connected to a vehicle. These show the high level status of the vehicle, and can be clicked to see more detailed information.
 Vehicle Messages
Vehicle Messages
Click to show a dropdown of messages from the vehicle. This will change to a Yield sign if there are critical messages.
 GPS Status
GPS Status
Shows you satellite count and curent hdop.
 RC RSSI
RC RSSI
RS signal strength information.
 Telemetry RSSI
Telemetry RSSI
Telemetry signals strength information.
 Battery
Battery
Remaining battery percent.
 Flight Mode
Flight Mode
Current flight mode. Click to change flight mode.
 RTK GPS Survey-In Status
RTK GPS Survey-In Status
Shows you progress of RTK GPS Survey-In process
点击进入setup即可设置遥控器与飞机的控制方式
参考资料:
https://bbs.amovlab.com/plugin.php?id=zhanmishu_video:video&mod=video&cid=47&vid=999
https://www.amovlab.com/document
https://blog.csdn.net/qq_43115954/article/details/117731267?utm_source=app&app_version=4.13.0
以上是关于ROS实验笔记之——JCV-450无人机初入门的主要内容,如果未能解决你的问题,请参考以下文章