ROS实验笔记之——PX4仿真
Posted gwpscut
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了ROS实验笔记之——PX4仿真相关的知识,希望对你有一定的参考价值。
之前博文《ROS学习笔记之——PX4开发初入门》《ROS学习笔记之——PX4生态系统》已经对PX4做了一些基本的学习,并且在mac上搭建了px4开发环境。本博文在ubuntu下对PX4进行一些基本的仿真学习~
之前在做无人机仿真开发时《ROS实验笔记之——基于Prometheus自主无人机开源项目的学习与仿真》,已经安装了px4了~为此不需要重复安装配置步骤
先编译一下px4 gazebo环境
好像缺乏一些依赖~感觉是有些model没有加载下来
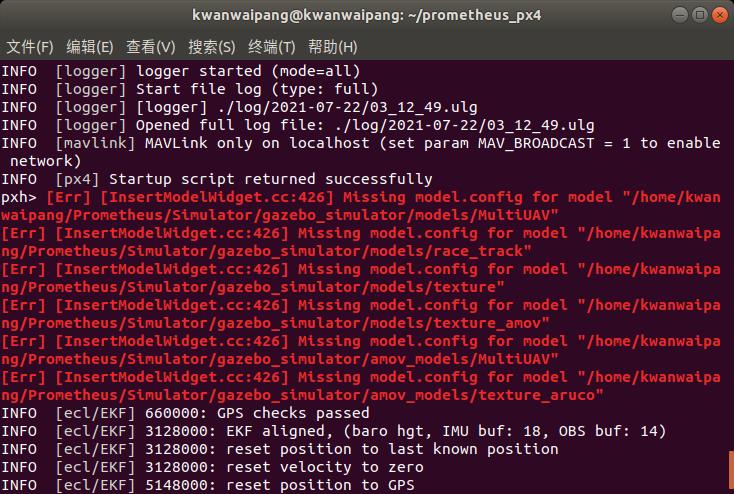
输入命令运行
然后下载qgc(http://qgroundcontrol.com/downloads/)

通过vscode打开px4文件,然后cmake选择px4 default以及sitl然后build
但是编译起来好像有点问题,感觉像是版本不支持?
参考资料
以上是关于ROS实验笔记之——PX4仿真的主要内容,如果未能解决你的问题,请参考以下文章