ROS实验笔记之——EVO
Posted gwpscut
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了ROS实验笔记之——EVO相关的知识,希望对你有一定的参考价值。
Error while processing "dvs_tracking flyingroom" · Issue #4 · uzh-rpg/rpg_dvs_evo_open · GitHub之前博客《ROS仿真笔记之——基于gazebo的event camera仿真(dvs gazebo)》介绍了DVS的gazebo仿真。博客《ROS学习笔记之——ESVO复现及DAVIS346测试》介绍了ESVO以及事件相机的驱动。本博文介绍一下EVO。
首先看看其framework
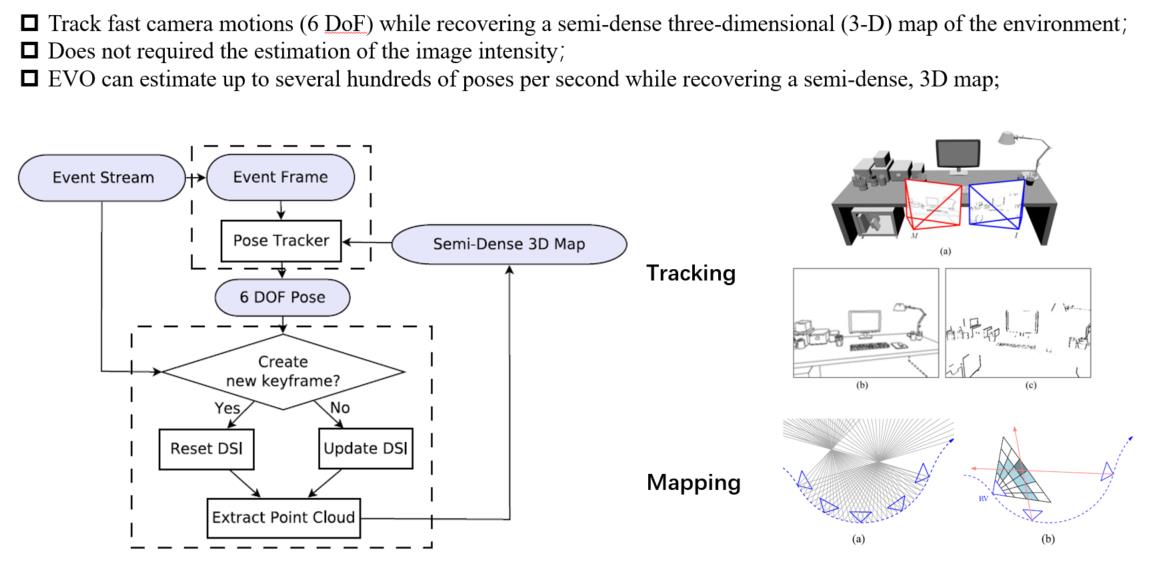
其框架分为tracking与mapping。
Tracking是基于环境半稠密的3D map来估算事件相机的6 DoF。通过image-to-model alignment。同样需要将event stream累积成为edge map。通过光流来计算增量位姿。
而mapping部分则是基于pose通过event数据流构成的。
两个模块平行进行。分别基于各自的output,算是比较传统的SLAM framework。但是缺点就是需要进行3D reconstruction才可以实现。
配置如下:
首先先进入工作空间的src然后克隆工程
git clone https://github.com/uzh-rpg/rpg_dvs_evo_open.git
然后安装依赖
./rpg_dvs_evo_open/install.sh melodic发现会报错,修改对应的dependencies.yaml里面的文件,好像也不行。。。先跳过
然后再编译这个包
catkin build dvs_tracking发现编译不了。感觉本质上就是出现的问题
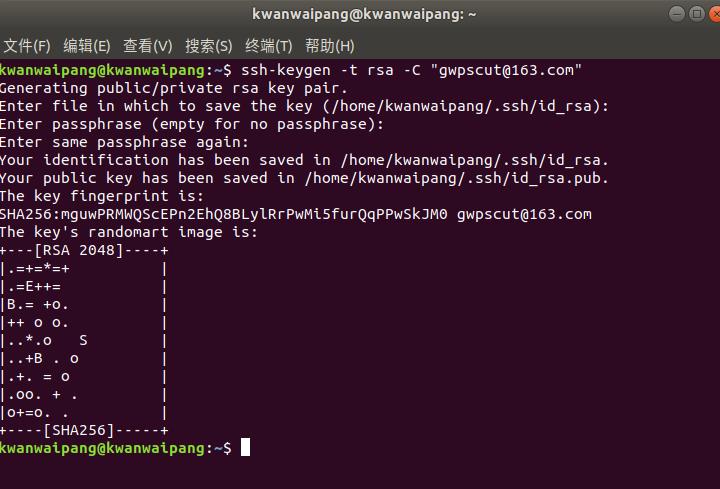
git@github.com: Permission denied (publickey)先执行命令
ssh-keygen -t rsa -C "gwpscut@163.com"
ssh -v git@github.com
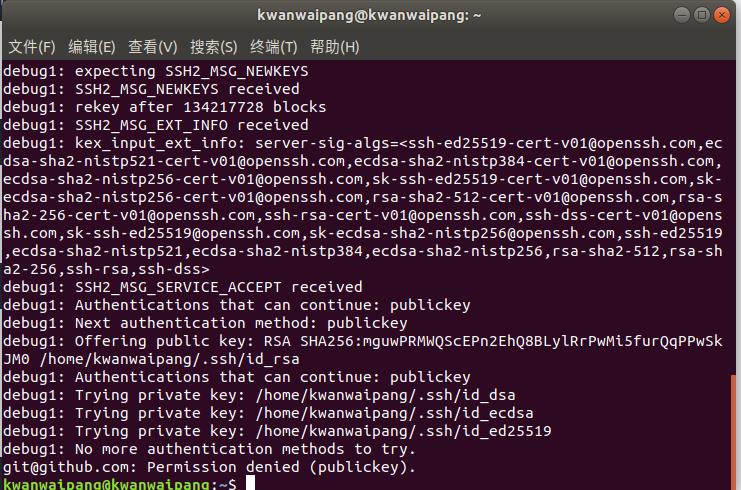
最后两句会出现
No more authentication methods to try.
Permission denied (publickey).
再执行
ssh-agent -s 
然后执行
ssh-add ~/.ssh/id_rsa
打开你刚刚生成的id_rsa.pub,将里面的内容复制,进入你的github账号,在settings下,SSH and GPG keys下new SSH key,然后将id_rsa.pub里的内容复制到Key中,完成后Add SSH Key。
验证Key
ssh -T git@github.com 
即可。然后将项目中的.git文件删除
然后再运行一次,还是不行,那么就在桌面新建一个文件夹,然后把东西都下载下来,再拉回去。好像还是有点问题。。。。
double check之后发现,应该是之前已经安装好的了,编译后发现除了dvs_renderer是安装过的,不再安装,其他应该都弄好了~
catkin build dvs_tracking
catkin build dvs_reconstruction
catkin build dvs_mapping接下来下载数据集。然后运行
roscore
rosrun davis_ros_driver davis_ros_driver
roslaunch dvs_tracking desk.launch auto_trigger:=true
rosbag play -r 0.7 /home/kwanwaipang/dataset/evo/evo_desk.bag
roslaunch dvs_tracking live.launch auto_trigger:=false camera_name:=DAVIS-ijrr events_topic:=/dvs/events
roslaunch dvs_tracking live.launch bootstrap_image_topic:=[topic raw frames] auto_trigger:=false
好像都不行。。。试试新建一个工作空间
mkdir -p ~/catkin_evo/src && cd ~/catkin_evo/
catkin config \\
--init --mkdirs --extend /opt/ros/melodic \\
--merge-devel --cmake-args \\
-DCMAKE_BUILD_TYPE=Release
还是报错,根issue里面的一样:Error while processing "dvs_tracking flyingroom" · Issue #4 · uzh-rpg/rpg_dvs_evo_open · GitHub
有配置成功的小伙伴指点一下吧~~~
参考资料:
https://github.com/uzh-rpg/rpg_dvs_evo_open
https://github.com/uzh-rpg/rpg_emvs解决git@github.com: Permission denied (publickey). Could not read from remote repository_ywl470812087的博客-CSDN博客https://github.com/uzh-rpg/rpg_emvs
以上是关于ROS实验笔记之——EVO的主要内容,如果未能解决你的问题,请参考以下文章