ROS学习笔记之——PX4生态系统
Posted gwpscut
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了ROS学习笔记之——PX4生态系统相关的知识,希望对你有一定的参考价值。
之前博客已经初步学习了PX4《ROS学习笔记之——PX4开发初入门》,本博文进一步的学习PX4的相关知识,部分资料来源于购买的阿木实验室的课程《PX4智能无人机二次开发》与《Prometheus自主无人机二次开发课程》
目录
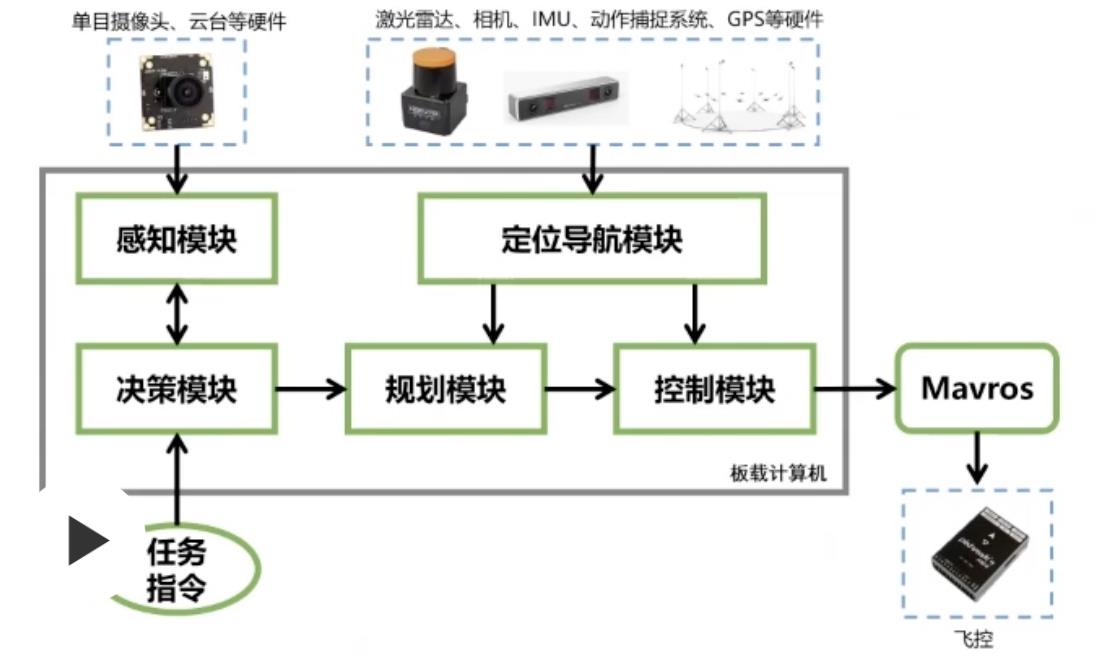
自主无人机的框架(下面以自主导航定位及目标识别为例)
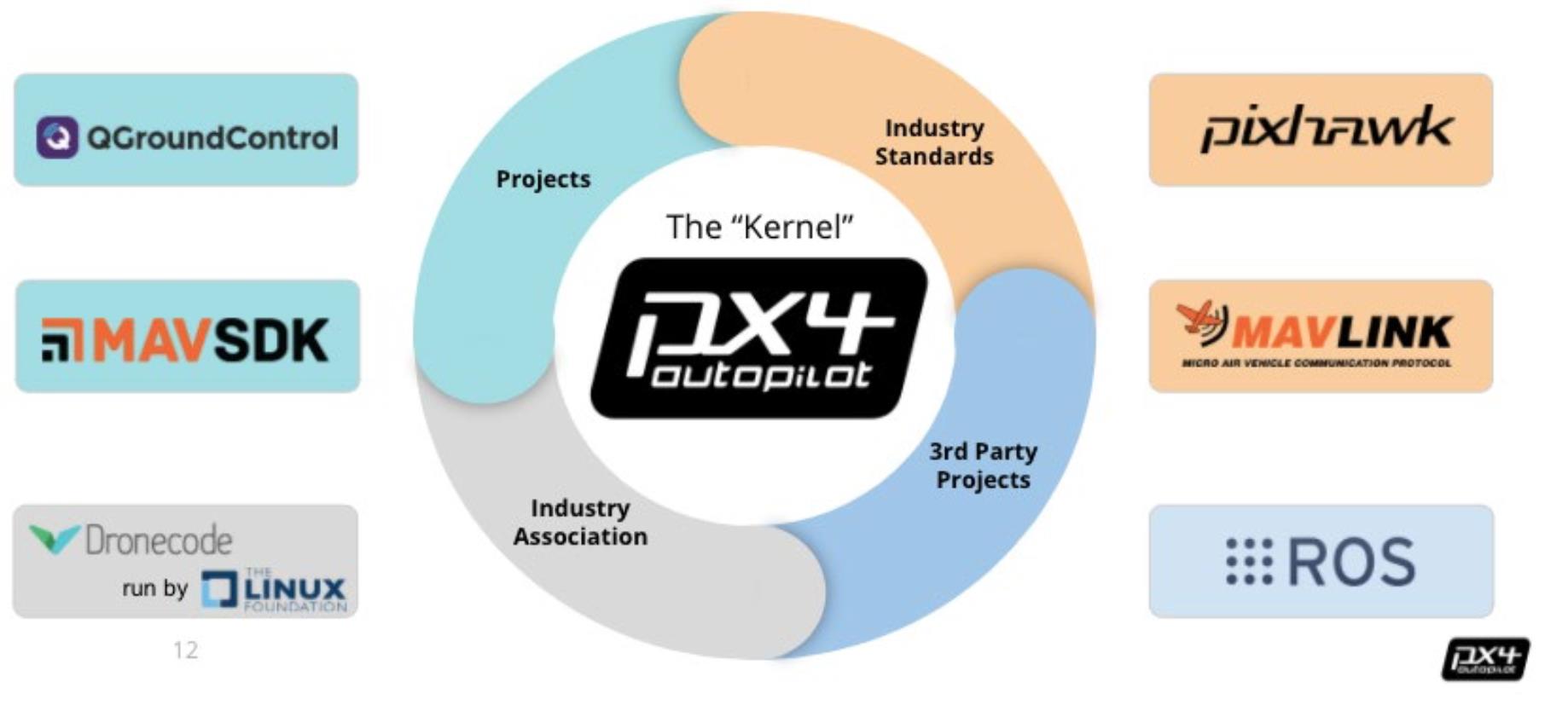
PX4的生态
PX4不仅仅只是飞控代码库,更是一个庞大的生态系统。它的优势在于 维护团队、学界/工业界共同参与、 配套的软/硬件等等。
Dronecode 基金会
PX4飞控硬件 - Pixhawk

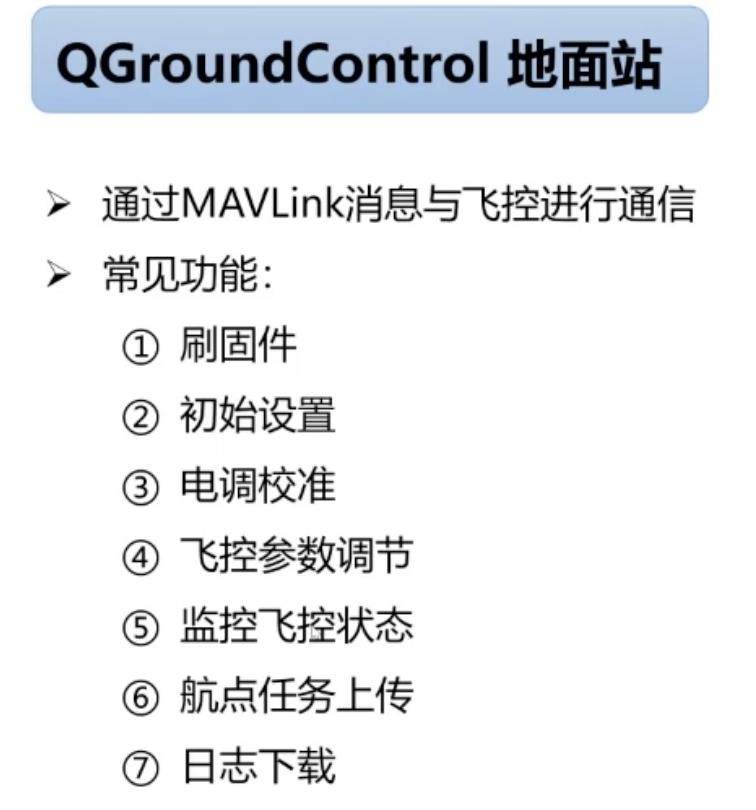
QGC
地面站的基本功能
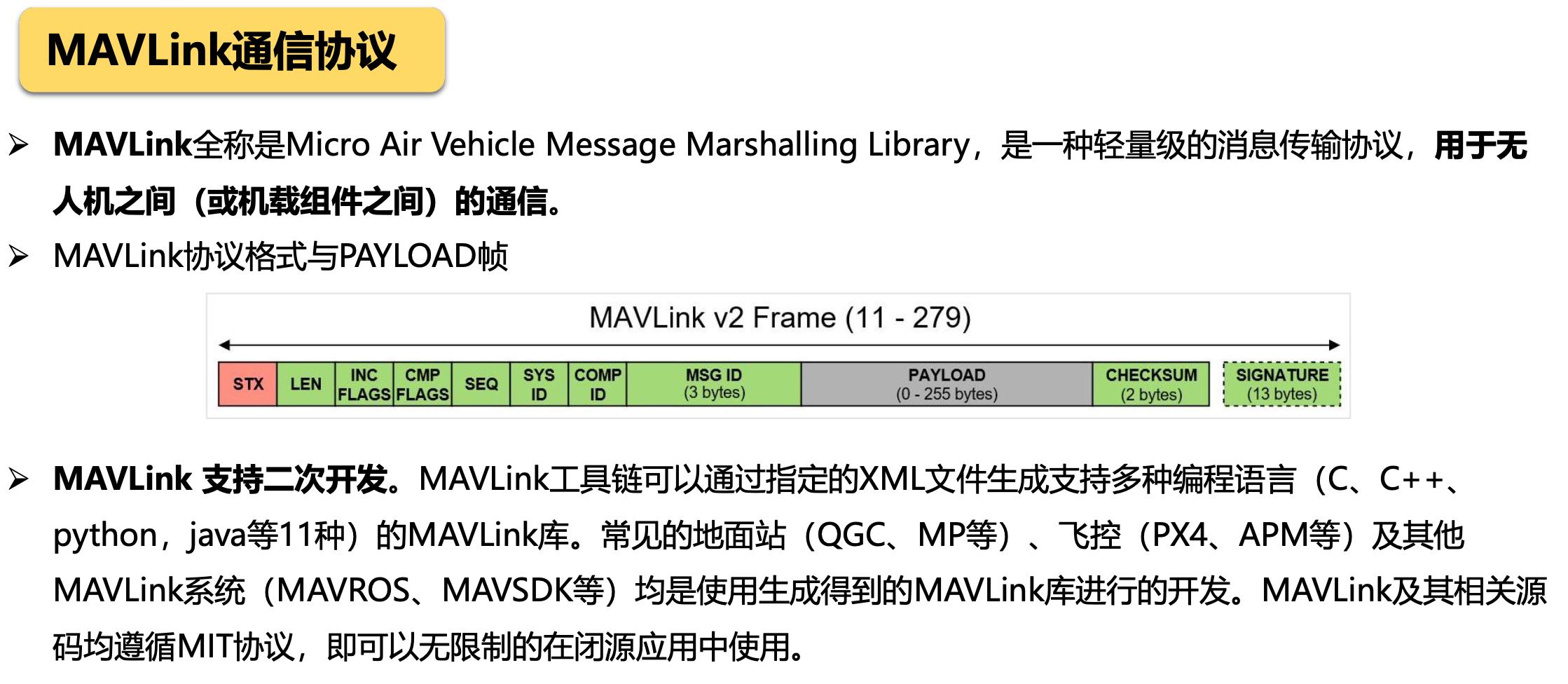
MAVLink通信协议
 Mavros 功能包
Mavros 功能包

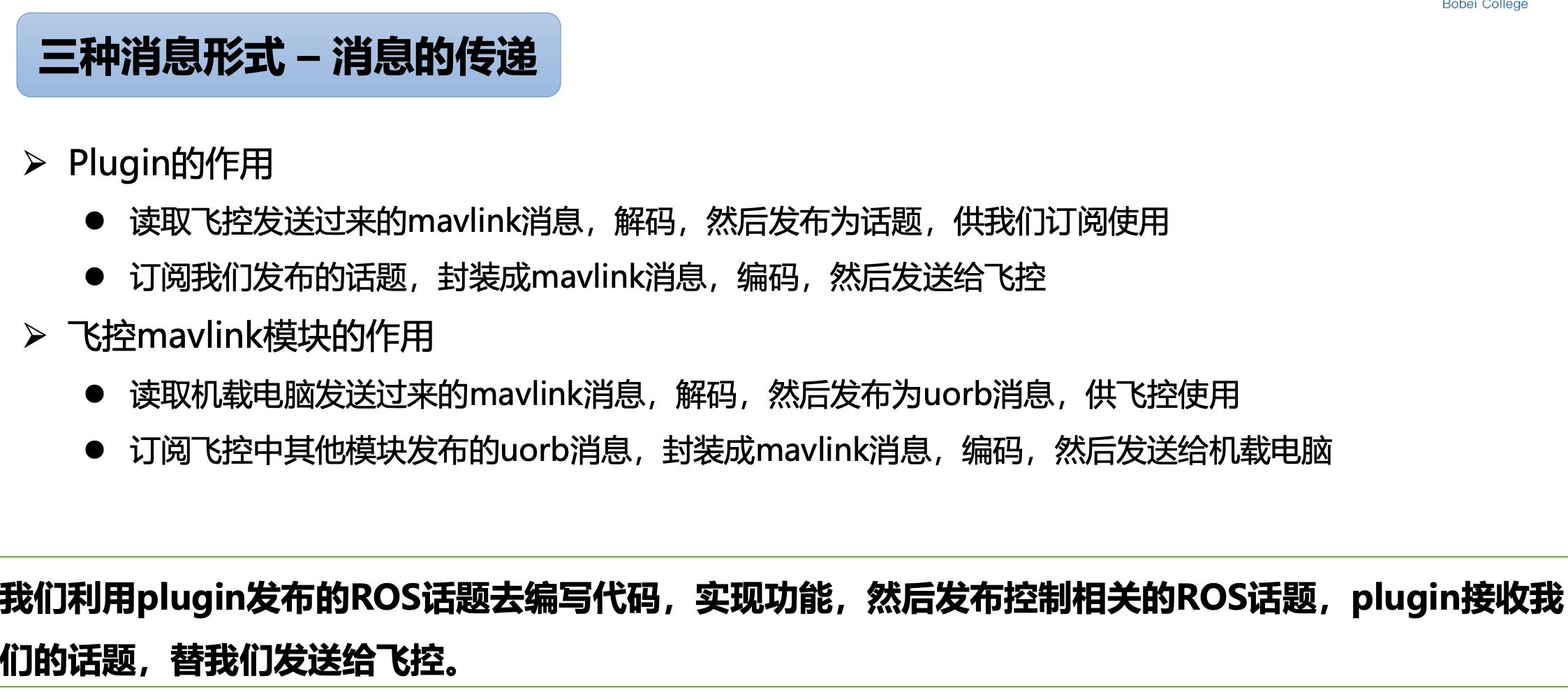
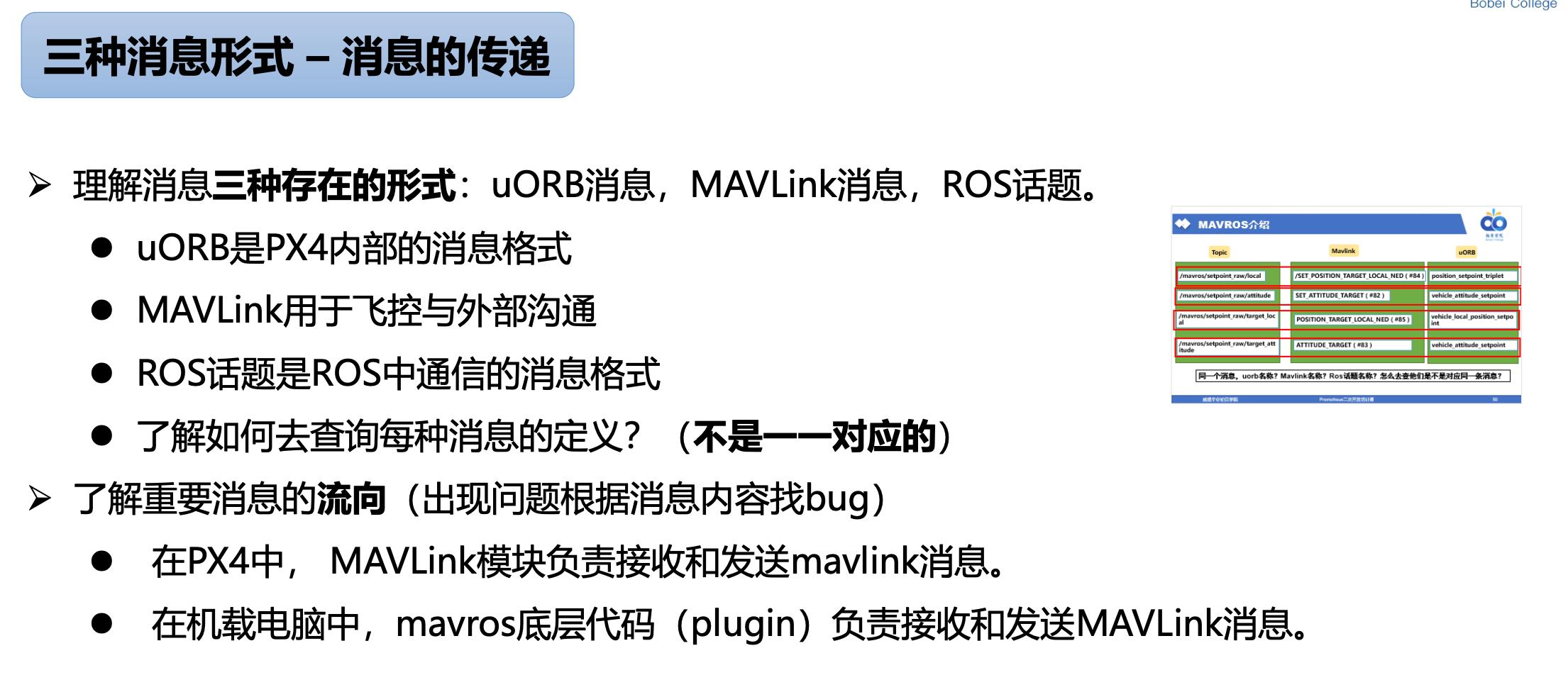
无人机中三种消息传递的机制
参考资料
https://dev.px4.io/v1.11_noredirect/zh/concept/dronecode_architecture.html
以上是关于ROS学习笔记之——PX4生态系统的主要内容,如果未能解决你的问题,请参考以下文章