ROS学习笔记之——基于QGC的PX4仿真
Posted gwpscut
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了ROS学习笔记之——基于QGC的PX4仿真相关的知识,希望对你有一定的参考价值。
之前博客《ROS实验笔记之——PX4仿真》已经介绍了PX4编译及QGC的安装,本博文进一步的基于QGC进行仿真控制
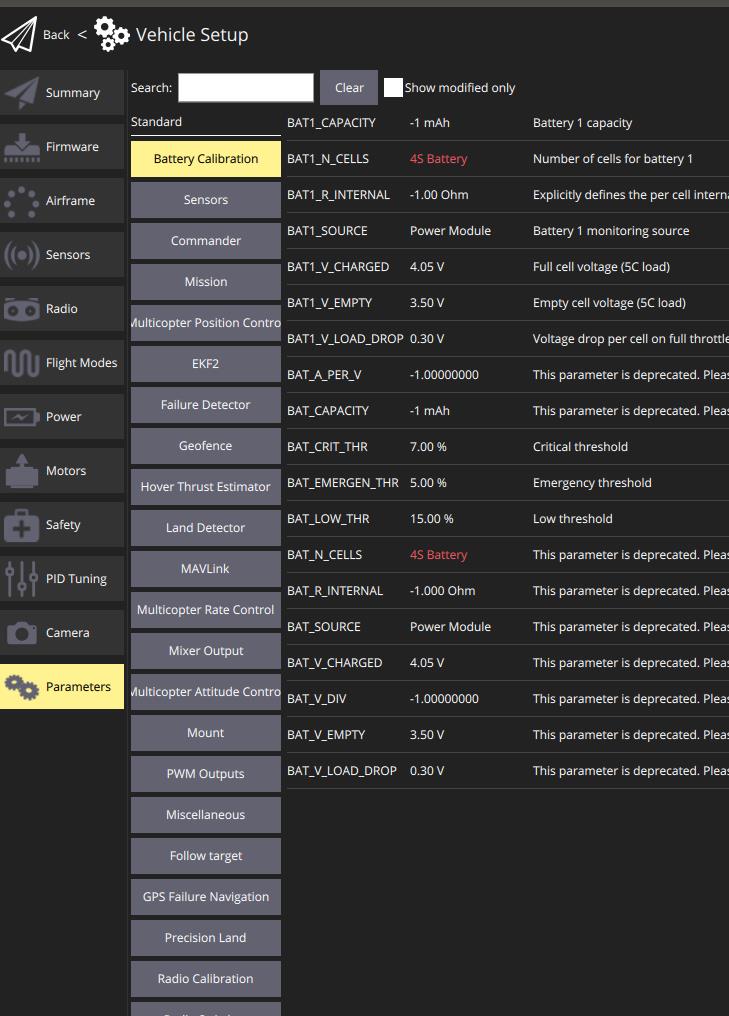
QGC里有很多的参数控制
首先打开虚拟的遥控器是实现遥控控制

就可以在QGC用模拟手柄控制无人机(左边的遥感是上下与yaw,右边的是前后左右)

以上是关于ROS学习笔记之——基于QGC的PX4仿真的主要内容,如果未能解决你的问题,请参考以下文章