ROS实验笔记之——SLAM无人驾驶初入门
Posted gwpscut
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了ROS实验笔记之——SLAM无人驾驶初入门相关的知识,希望对你有一定的参考价值。
最近想学习一下无人驾驶SLAM方面的内容
代码测试
这里先基于kitti数据集,进行测试。之前博客中已经介绍过kitti数据集了。本博文就用这个数据集来进行各种经典方法的复现
The KITTI Vision Benchmark Suite http://www.cvlibs.net/datasets/kitti/eval_odometry.php
http://www.cvlibs.net/datasets/kitti/eval_odometry.php
VINS-FUSION
VINS-Fusion demo
把vins-mono也配置一下好了~
主要cm的时候会报错,把里面cmakelist的c++11改为14即可
这样可以避免出错,但好像运行会报错
试试改为ceres-solver-1.14.0。再编译。发现还是不可以。。。。重装系统看看。
在另外一台电脑上尝试了不行,然后把vins-fusion也编译了一下,然后运行过vins-fusion后就可以了???再运行好就work了。。。奇怪。。。。
最终发现问题了,要按下面顺序运行才可以。。。cao
这个原因非常的迷惑。。。。。
roslaunch vins_estimator vins_rviz.launch
roslaunch vins_estimator euroc.launch
vins系列真的非常丰富,下面还有个co-vins
https://github.com/qintonguav/Co-VINShttps://github.com/qintonguav/Co-VINS
A-LOAM
之前博客《学习笔记之——激光雷达SLAM(LOAM系列的复现与学习)》已经配置过A-LOAM了。本博文来跑一下其kitti数据集
 https://github.com/HKUST-Aerial-Robotics/A-LOAM
https://github.com/HKUST-Aerial-Robotics/A-LOAM注意,对于下载的数据集需要按以下的形式打包放好
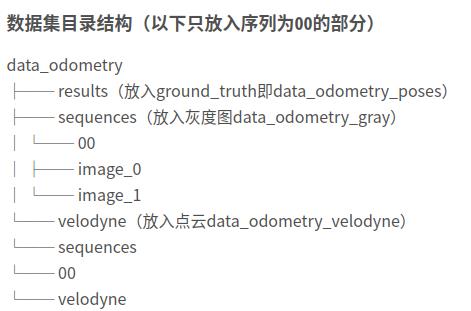
data
|----poses
| |----00.txt
|----sequences
| |----00
| | |----image_0
| | |----image_1
| | |----velodyne
| | |----time.txt
然后将kitti的launch修改为:
<launch>
<node name="kittiHelper" pkg="aloam_velodyne" type="kittiHelper" output="screen">
<!-- <param name="dataset_folder" type="string" value="/data/KITTI/odometry/" /> -->
<param name="dataset_folder" type="string" value="/home/kwanwaipang/dataset/kitti/data/" />
<param name="sequence_number" type="string" value="00" />
<!-- <param name="to_bag" type="bool" value="false" /> -->
<param name="to_bag" type="bool" value="true" />
<!-- <param name="output_bag_file" type="string" value="/tmp/kitti.bag" /> replace with your output folder -->
<param name="output_bag_file" type="string" value="/home/kwanwaipang/dataset/kitti/kitti_00.bag" /> <!-- replace with your output folder -->
<param name="publish_delay" type="int" value="1" />
</node>
</launch>好坑。。上面那样的list是不对的。要改为下面这样才对(建议直接看源代码)
运行效果如下图所示
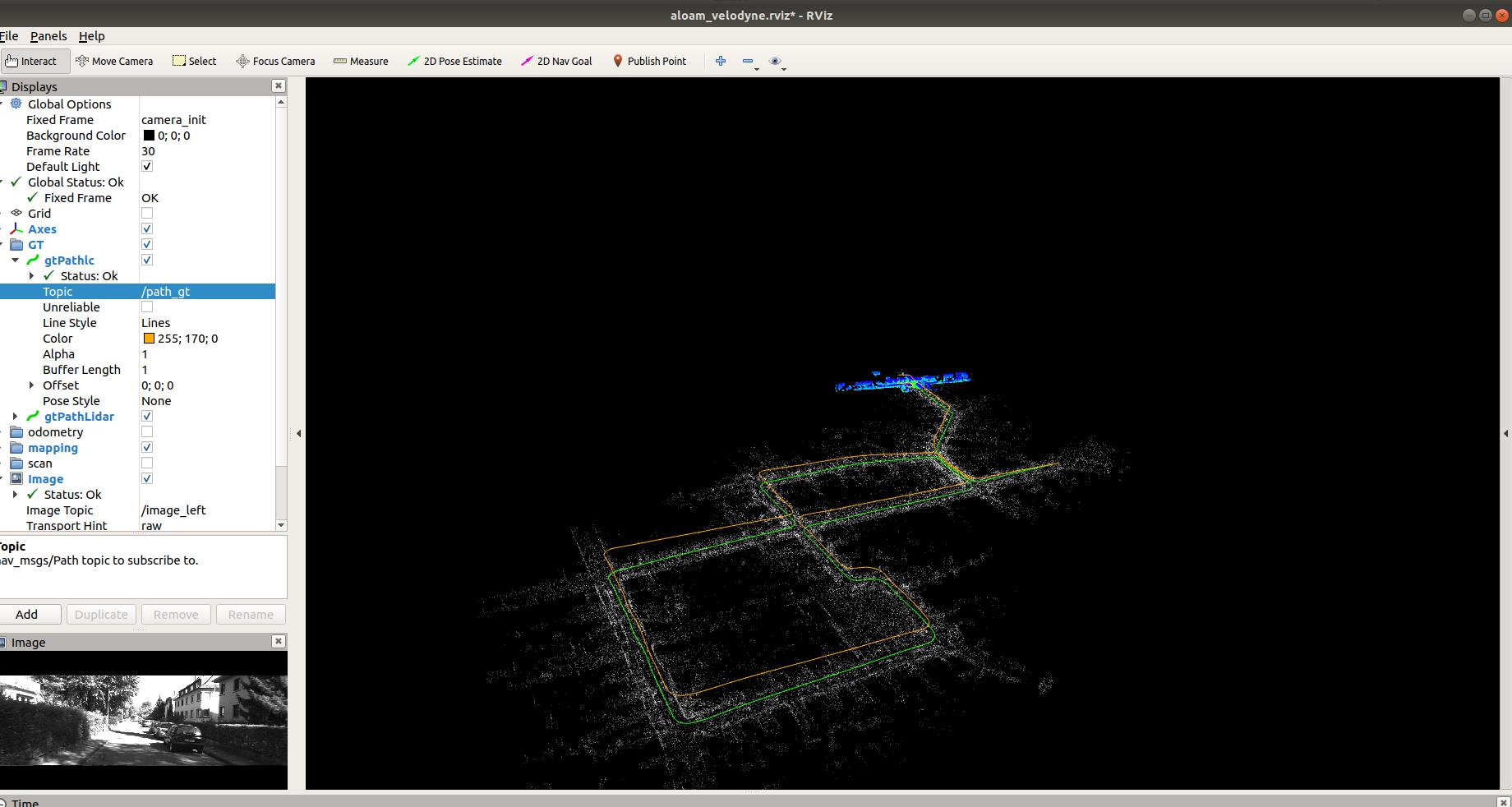
视频连接:
aloam
LIO-SAM
https://github.com/TixiaoShan/LIO-SAMhttps://github.com/TixiaoShan/LIO-SAM
有可能出现缺乏依赖libmetis.so而报错。运行下面命令安装即可
sudo apt-get install -y libmetis-dev
如若需要允许kitti数据集,则需要将config里面的参数文件修改如下:
lio_sam:
# Topics
pointCloudTopic: "points_raw" # Point cloud data
# imuTopic: "imu_raw" # IMU data
imuTopic: "imu_correct" # IMU data
odomTopic: "odometry/imu" # IMU pre-preintegration odometry, same frequency as IMU
gpsTopic: "odometry/gpsz" # GPS odometry topic from navsat, see module_navsat.launch file
# Frames
lidarFrame: "base_link"
baselinkFrame: "base_link"
odometryFrame: "odom"
mapFrame: "map"
# GPS Settings
useImuHeadingInitialization: true # if using GPS data, set to "true"
useGpsElevation: false # if GPS elevation is bad, set to "false"
gpsCovThreshold: 2.0 # m^2, threshold for using GPS data
poseCovThreshold: 25.0 # m^2, threshold for using GPS data
# Export settings
savePCD: false # https://github.com/TixiaoShan/LIO-SAM/issues/3
savePCDDirectory: "/Downloads/LOAM/" # in your home folder, starts and ends with "/". Warning: the code deletes "LOAM" folder then recreates it. See "mapOptimization" for implementation
# Sensor Settings
sensor: velodyne # lidar sensor type, either 'velodyne' or 'ouster'
N_SCAN: 64 #16 # number of lidar channel (i.e., 16, 32, 64, 128)
Horizon_SCAN: 1800 # lidar horizontal resolution (Velodyne:1800, Ouster:512,1024,2048)
downsampleRate: 2 #1 # default: 1. Downsample your data if too many points. i.e., 16 = 64 / 4, 16 = 16 / 1
lidarMinRange: 1.0 # default: 1.0, minimum lidar range to be used
lidarMaxRange: 1000.0 # default: 1000.0, maximum lidar range to be used
# IMU Settings
imuAccNoise: 3.9939570888238808e-03
imuGyrNoise: 1.5636343949698187e-03
imuAccBiasN: 6.4356659353532566e-05
imuGyrBiasN: 3.5640318696367613e-05
imuGravity: 9.80511
imuRPYWeight: 0.01
# Extrinsics (lidar -> IMU)
extrinsicTrans: [-8.086759e-01, 3.195559e-01, -7.997231e-01]
extrinsicRot: [9.999976e-01, 7.553071e-04, -2.035826e-03, -7.854027e-04, 9.998898e-01, -1.482298e-02, 2.024406e-03, 1.482454e-02, 9.998881e-01]
extrinsicRPY: [9.999976e-01, 7.553071e-04, -2.035826e-03, -7.854027e-04, 9.998898e-01, -1.482298e-02, 2.024406e-03, 1.482454e-02, 9.998881e-01]
# extrinsicRot: [1, 0, 0,
# 0, 1, 0,
# 0, 0, 1]
# extrinsicRPY: [1, 0, 0,
# 0, 1, 0,
# 0, 0, 1]
# LOAM feature threshold
edgeThreshold: 1.0
surfThreshold: 0.1
edgeFeatureMinValidNum: 10
surfFeatureMinValidNum: 100
# voxel filter paprams
odometrySurfLeafSize: 0.4 # default: 0.4 - outdoor, 0.2 - indoor
mappingCornerLeafSize: 0.2 # default: 0.2 - outdoor, 0.1 - indoor
mappingSurfLeafSize: 0.4 # default: 0.4 - outdoor, 0.2 - indoor
# robot motion constraint (in case you are using a 2D robot)
z_tollerance: 1000 # meters
rotation_tollerance: 1000 # radians
# CPU Params
numberOfCores: 4 # number of cores for mapping optimization
mappingProcessInterval: 0.15 # seconds, regulate mapping frequency
# Surrounding map
surroundingkeyframeAddingDistThreshold: 1.0 # meters, regulate keyframe adding threshold
surroundingkeyframeAddingAngleThreshold: 0.2 # radians, regulate keyframe adding threshold
surroundingKeyframeDensity: 2.0 # meters, downsample surrounding keyframe poses
surroundingKeyframeSearchRadius: 50.0 # meters, within n meters scan-to-map optimization (when loop closure disabled)
# Loop closure
loopClosureEnableFlag: true
loopClosureFrequency: 1.0 # Hz, regulate loop closure constraint add frequency
surroundingKeyframeSize: 50 # submap size (when loop closure enabled)
historyKeyframeSearchRadius: 15.0 # meters, key frame that is within n meters from current pose will be considerd for loop closure
historyKeyframeSearchTimeDiff: 30.0 # seconds, key frame that is n seconds older will be considered for loop closure
historyKeyframeSearchNum: 25 # number of hostory key frames will be fused into a submap for loop closure
historyKeyframeFitnessScore: 0.3 # icp threshold, the smaller the better alignment
# Visualization
globalMapVisualizationSearchRadius: 1000.0 # meters, global map visualization radius
globalMapVisualizationPoseDensity: 10.0 # meters, global map visualization keyframe density
globalMapVisualizationLeafSize: 1.0 # meters, global map visualization cloud density
# Navsat (convert GPS coordinates to Cartesian)
navsat:
frequency: 50
wait_for_datum: false
delay: 0.0
magnetic_declination_radians: 0
yaw_offset: 0
zero_altitude: true
broadcast_utm_transform: false
broadcast_utm_transform_as_parent_frame: false
publish_filtered_gps: false
# EKF for Navsat
ekf_gps:
publish_tf: false
map_frame: map
odom_frame: odom
base_link_frame: base_link
world_frame: odom
frequency: 50
two_d_mode: false
sensor_timeout: 0.01
# -------------------------------------
# External IMU:
# -------------------------------------
imu0: imu_correct
# make sure the input is aligned with ROS REP105. "imu_correct" is manually transformed by myself. EKF can also transform the data using tf between your imu and base_link
imu0_config: [false, false, false,
true, true, true,
false, false, false,
false, false, true,
true, true, true]
imu0_differential: false
imu0_queue_size: 50
imu0_remove_gravitational_acceleration: true
# -------------------------------------
# Odometry (From Navsat):
# -------------------------------------
odom0: odometry/gps
odom0_config: [true, true, true,
false, false, false,
false, false, false,
false, false, false,
false, false, false]
odom0_differential: false
odom0_queue_size: 10
# x y z r p y x_dot y_dot z_dot r_dot p_dot y_dot x_ddot y_ddot z_ddot
process_noise_covariance: [ 1.0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0,
0, 1.0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0,
0, 0, 10.0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0,
0, 0, 0, 0.03, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0,
0, 0, 0, 0, 0.03, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0,
0, 0, 0, 0, 0, 0.1, 0, 0, 0, 0, 0, 0, 0, 0, 0,
0, 0, 0, 0, 0, 0, 0.25, 0, 0, 0, 0, 0, 0, 0, 0,
0, 0, 0, 0, 0, 0, 0, 0.25, 0, 0, 0, 0, 0, 0, 0,
0, 0, 0, 0, 0, 0, 0, 0, 0.04, 0, 0, 0, 0, 0, 0,
0, 0, 0, 0, 0, 0, 0, 0, 0, 0.01, 0, 0, 0, 0, 0,
0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0.01, 0, 0, 0, 0,
0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0.5, 0, 0, 0,
0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0.01, 0, 0,
0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0.01, 0,
0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0.015]
同样的类似ALOAM,作者也给出了从kitti生成rosbag的代码
To generate more bags using other KITTI raw data, you can use the python script provided in "config/doc/kitti2bag".
视频效果如下:
LIO-SAM
LIO-Mapping:A Tightly Coupled 3D Lidar and Inertial Odometry and Mapping Approach
Stereo Visual Inertial Pose Estimation Based on Feedforward-Feedback Loops
这是港理工的一个开源项目。论文链接见:https://arxiv.org/pdf/2007.02250.pdf
按照要求配置看看~
如果kitti报错
(.text.startup+0x4e8):对‘Sophus::SE3::SE3()’未定义的引用可以参考(Sophus 编译错误_u010003609的博客-CSDN博客)
将对应的cmkaelist文件改为
cmake_minimum_required(VERSION 2.8.3)
project(flvis)
add_definitions(-std=c++11)
#set(CMAKE_CXX_FLAGS "-std=c++11)
set(CMAKE_CXX_FLAGS "-std=c++11 ${CMAKE_CXX_FLAGS} -O3 -Wall -pthread") # -Wextra -Werror
set(CMAKE_BUILD_TYPE "RELEASE")
list(APPEND CMAKE_MODULE_PATH ${CMAKE_CURRENT_SOURCE_DIR}/3rdPartLib/g2o/cmake_modules)
set(G2O_ROOT /usr/local/include/g2o)
find_package(G2O REQUIRED)
find_package (OpenCV 3 REQUIRED)
find_package (Eigen3 REQUIRED)
find_package (CSparse REQUIRED )
find_package (Sophus REQUIRED )
find_package (yaml-cpp REQUIRED )
find_package (DBoW3 REQUIRED)
# pcl
find_package( PCL REQUIRED)
include_directories( ${PCL_INCLUDE_DIRS} )
add_definitions( ${PCL_DEFINITIONS} )
#FIND_PACKAGE(octomap REQUIRED )
#FIND_PACKAGE(octovis REQUIRED )
#INCLUDE_DIRECTORIES(${OCTOMAP_INCLUDE_DIRS})
find_package(catkin REQUIRED COMPONENTS
nodelet
roscpp
rostime
std_msgs
sensor_msgs
geometry_msgs
nav_msgs
pcl_ros
tf
visualization_msgs
image_transport
cv_bridge
message_generation
message_filters
)
add_message_files(
FILES
KeyFrame.msg
CorrectionInf.msg
)
generate_messages(
DEPENDENCIES
std_msgs
sensor_msgs
geometry_msgs
nav_msgs
visualization_msgs
)
## Declare a catkin package
catkin_package(
CATKIN_DEPENDS message_runtime
)
include_directories(
${catkin_INCLUDE_DIRS}
${OpenCV_INCLUDE_DIRS}
${G2O_INCLUDE_DIRS}
${CSPARSE_INCLUDE_DIR}
${Sophus_INCLUDE_DIRS}
${YAML_CPP_INCLUDE_DIR}
${DBoW3_INCLUDE_DIR}
"${CMAKE_CURRENT_SOURCE_DIR}/src/"
"${CMAKE_CURRENT_SOURCE_DIR}/src/processing/"
"${CMAKE_CURRENT_SOURCE_DIR}/src/backend/"
"${CMAKE_CURRENT_SOURCE_DIR}/src/frontend/"
"${CMAKE_CURRENT_SOURCE_DIR}/src/utils/"
"${CMAKE_CURRENT_SOURCE_DIR}/src/visualization/"
#"${CMAKE_CURRENT_SOURCE_DIR}/src/octofeeder/"
)
SET(G2O_LIBS cholmod cxsparse -lg2o_cli -lg2o_core
-lg2o_csparse_extension -lg2o_ext_freeglut_minimal -lg2o_incremental
-lg2o_interactive -lg2o_interface -lg2o_opengl_helper -lg2o_parser
-lg2o_simulator -lg2o_solver_cholmod -lg2o_solver_csparse
-lg2o_solver_dense -lg2o_solver_pcg -lg2o_solver_slam2d_linear
-lg2o_solver_structure_only -lg2o_stuff -lg2o_types_data -lg2o_types_icp
-lg2o_types_sba -lg2o_types_sclam2d -lg2o_types_sim3 -lg2o_types_slam2d
-lg2o_types_slam3d)
## Declare a C++ library
add_library(flvis
#processing
src/processing/feature_dem.cpp
src/processing/depth_camera.cpp
src/processing/landmark.cpp
src/processing/camera_frame.cpp
src/processing/triangulation.cpp
src/processing/lkorb_tracking.cpp
src/processing/imu_state.cpp
src/processing/vi_motion.cpp
src/processing/optimize_in_frame.cpp
#vis
src/visualization/rviz_frame.cpp
src/visualization/rviz_path.cpp
src/visualization/rviz_pose.cpp
src/visualization/rviz_odom.cpp
#msg
src/utils/keyframe_msg.cpp
src/utils/correction_inf_msg.cpp
#node tracking
src/frontend/vo_tracking.cpp
src/frontend/f2f_tracking.cpp
#node localmap
src/backend/vo_localmap.cpp
#node loop closing
src/backend/vo_loopclosing.cpp
src/backend/poselmbag.cpp
#src/octofeeder/octomap_feeder.cpp
)
add_dependencies(flvis
flvis_generate_messages_cpp
${catkin_EXPORTED_TARGETS})
target_link_libraries(flvis
${catkin_LIBRARIES}
${OpenCV_LIBRARIES}
${CSPARSE_LIBRARY}
${Sophus_LIBRARIES}
${YAML_CPP_LIBRARIES}
${DBoW3_LIBRARIES}
${G2O_LIBS}
${PCL_LIBRARIES}
${Boost_SYSTEM_LIBRARY}
#${OCTOMAP_LIBRARIES}
)
#independent modules
#1 euroc_publisher publish path
add_executable(vo_repub_rec
src/independ_modules/vo_repub_rec.cpp)
target_link_libraries(vo_repub_rec
${catkin_LIBRARIES}
${Sophus_LIBRARIES})
add_executable(kitti_publisher
src/independ_modules/kitti_publisher.cpp
src/visualization/rviz_path.cpp)
set(Sophus_LIBRARIES libSophus.so)
target_link_libraries(kitti_publisher
${catkin_LIBRARIES}
${Sophus_LIBRARIES})
注意,可能出现g2o安装不好导致有问题,重新装一下即可
修改对应的launch文件,数据集还是上面整理好的
<?xml version="1.0"?>
<launch>
<!--Input######################################################################################################-->
<param name="/dataset_pub_delay" type="double" value="5.0" />
<param name="/dataset_pub_rate" type="int" value="30" />
<param name="/publish_gt" type="bool" value="true" />
<param name="/dataset_folder_path" type="string" value="/home/kwanwaipang/dataset/kitti/data/sequences/00/" />
<param name="/dataset_gt_file" type="string" value="/home/kwanwaipang/dataset/kitti/data/results/00.txt" />
<node pkg="flvis" type="kitti_publisher" name="kitti_publisher" output="screen"/>
<!--FLVIS######################################################################################################-->
<arg name="node_start_delay" default="1.0" />
<param name="/yamlconfigfile" type="string" value="$(find flvis)/launch/KITTI/KITTI.yaml"/>
<param name="/voc" type="string" value="$(find flvis)/voc/voc_orb.dbow3"/>
<!-- Manager -->
<node pkg="nodelet" type="nodelet"
name="flvis_nodelet_manager" args="manager" output="screen"
launch-prefix="bash -c 'sleep $(arg node_start_delay); $0 $@' ">
<param name="num_worker_threads" value="4" />
</node>
<!-- TrackingNode -->
<!-- D435i -->
<node pkg="nodelet" type="nodelet" args="load flvis/TrackingNodeletClass flvis_nodelet_manager"
name="TrackingNodeletClass_loader" output="screen"
launch-prefix="bash -c 'sleep $(arg node_start_delay); $0 $@' ">
<remap from="/imu" to="/camera/imu"/>
</node>
<!-- LocalMapNode -->
<!--window_size: Num of keyframes in sliding window optimizer-->
<!-- <node pkg="nodelet" type="nodelet" args="load flvis/LocalMapNodeletClass flvis_nodelet_manager"
name="LocalMapNodeletClass_loader" output="screen"
launch-prefix="bash -c 'sleep $(arg node_start_delay); $0 $@' ">
<param name="/window_size" type="int" value="8" />
</node>-->
<!-- LoopClosingNode -->
<node pkg="nodelet" type="nodelet" args="load flvis/LoopClosingNodeletClass flvis_nodelet_manager"
name="LoopClosingNodeletClass_loader" output="screen"
launch-prefix="bash -c 'sleep $(arg node_start_delay); $0 $@' ">
</node>
<node pkg="flvis" type="vo_repub_rec" name="lc2file" output="screen">
<!--Sub Support Type:-->
<param name="sub_type" type="string" value="NavPath" />
<param name="sub_topic" type="string" value="/vision_path_lc_all" />
<!--Support Type:-->
<!--"0" disable the republish function -->
<!--"Path"-->
<!--"PoseStamped"-->
<param name="repub_type" type="string" value="0" />
<param name="repub_topic" type="string" value="/republish_path" />
<!--output_file_path = "0" disable the file output function-->
<param name="output_file_path" type="string" value="$(find flvis)/results/kitti_lc.txt" />
</node>
</launch>
roslaunch flvis rviz_kitti.launch
roslaunch flvis flvis_kitti.launch效果如下
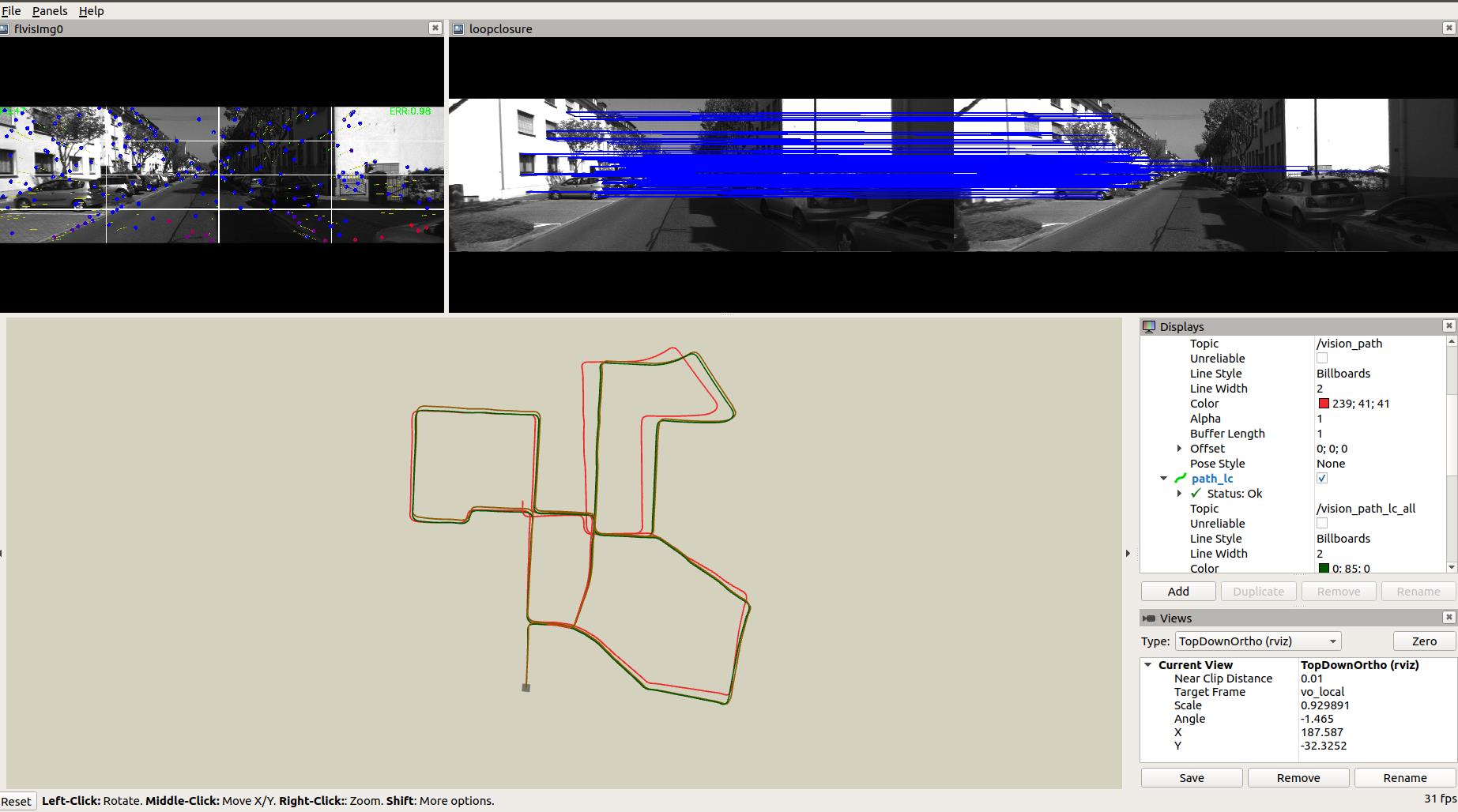
flvis
AVP-SLAM: Semantic Visual Mapping and Localization for Autonomous Vehicles in the Parking Lot
ORB-SLAM 跑kitti
GVINS: Tightly Coupled GNSS-Visual-Inertial Fusion for Smooth and Consistent State Estimation
SuMa++: Efficient LiDAR-based Semantic SLAM
https://github.com/PRBonn/semantic_sumahttps://github.com/PRBonn/semantic_suma
DSO: Direct Sparse Odometry
 https://blog.csdn.net/weixin_43166819/article/details/103133570
https://blog.csdn.net/weixin_43166819/article/details/103133570OverlapNet - Loop Closing for 3D LiDAR-based SLAM
https://github.com/PRBonn/OverlapNet
High-speed Autonomous Drifting with Deep Reinforcement Learning
GitHub - caipeide/drift_drl: High-speed Autonomous Drifting with Deep Reinforcement Learning
https://sites.google.com/view/autonomous-drifting-with-drl
参考资料
以上是关于ROS实验笔记之——SLAM无人驾驶初入门的主要内容,如果未能解决你的问题,请参考以下文章