智能控制导论雪堆博弈-最小节点覆盖问题
Posted zstar-_
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了智能控制导论雪堆博弈-最小节点覆盖问题相关的知识,希望对你有一定的参考价值。
本篇博文是智能控制导论专业课的实验报告
完整的程序和文档下载地址:https://download.csdn.net/download/qq1198768105/85259200
问题描述
验证结论:当雪堆博弈满足r<1/kmax时(kmax为网络节点的最大度),网络博弈的纳什均衡中的采用合作策略的节点构成极小节点覆盖。网络结构可自定,节点数目不少于10。
节点的初始状态可随机定为Cooperator或者Defector,按照某种给定顺序(例如1,2,…,10)依次检查每个节点,是否改变其状态可以获得更大收益,如果是则改变状态,否则不改变,直到所有节点都不再改变状态为止。验证合作的节点集合是否是极小节点覆盖。
问题背景
极小节点覆盖
网络节点最小覆盖问题(MVCP)是一个著名组合优化问题,其目的在于找出给定网络的最小节点集合以覆盖所有的边。其中,若节点集合中去掉任何一个点,就不能覆盖网络所有边,则称此时为极小节点覆盖。
雪堆博弈
雪堆博弈所描述的情景是:在一个风雪交加的夜晚,两人相向而来,被一个雪堆所阻。他们可以选择下车铲雪(合作C),或者都不铲雪(背叛D)。如果两人都不铲雪,两人就都无法通行;如果一人铲雪一人不铲,则铲雪者付出了劳动,背叛者白占了成果。
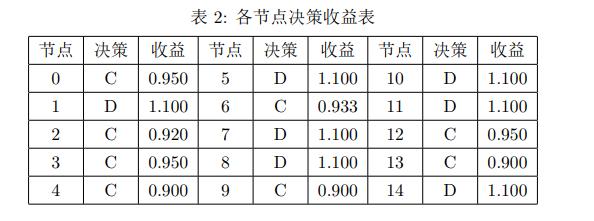
设铲雪所需的劳动价值为r,通行所获得的收益为1,则雪堆博弈的收益矩阵收益矩阵如下表所示
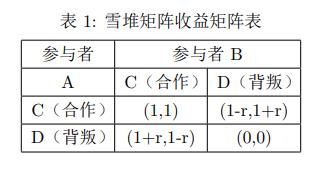
纳什均衡指的是在给定别人策略的情况下,没有人愿意单方面改变自己的策略,从而打破这种均衡。
算法思路
为了寻找到当前网络博弈的纳什均衡,需完成以下几个步骤:
-
随机给每个节点初始状态设置为C或D(C表示合作,D表示背叛)
-
依次对每个节点计算其采用C或者D的收益,改变其策略使其收益最大
-
重复2过程到每个节点的状态不在改变
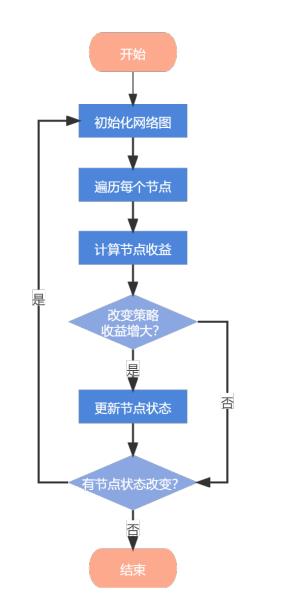
算法流程如图1所示:
实验步骤
网络结构图
本实验网络设置了15个节点,其结构图如图2所示:
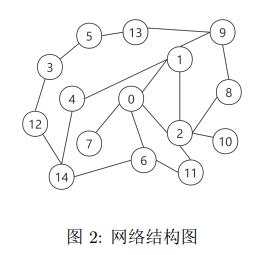
该网络中kmax为5,定理存在条件r<1/kmax,因此实验设定r为0.1。
第一次求解
首先初始化网络,每个节点都有50%的概率选择合作©或背叛(D),之后根据算法流程进行更新,初始状态,中间过程,最终结果如下图所示:
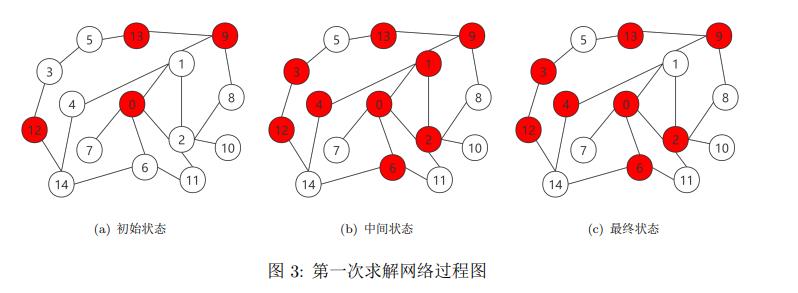
图中,红色代表决策C,白色代表决策D。可以发现,最终结果实现了极小节点覆盖。各节点的决策收益如表2所示:
第二次求解
第二次求解过程和第一次类似,初始状态,中间过程,最终结果如下图所示:
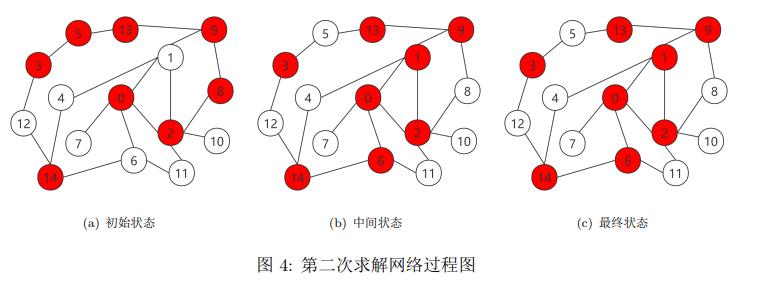
可以发现,由于初始生成情况较好,此次求解很快,中间状态和最终状态一致。同样,和第一次求解对比,可以发现极小节点覆盖的解不唯一,存在多解情况。各节点的决策收益如表3所示:

总结
本次实验验证了结论:当雪堆博弈满足r<1/kmax时(kmax为网络节点的最大度),网络博弈的纳什均衡中的采用合作策略的节点构成极小节点覆盖。与此同时,该验证过程还反映出个体在博弈中寻求最大利益的属性,会使得整个群体在数次迭代后趋向于一个对整体较为有利的情况,使得整个群体得到最大的利益。
参考文献
[1]吴建设, 焦李成, 皎魁,等.基于雪堆博弈进化的复杂网络节点覆盖方法:,CN105050096A[P]. 2015.
程序代码
python代码:
import random
# r<1/kmax
r = 0.1
# 收益矩阵
rewardMat =
'C': 'C': (1, 1), 'D': (1 - r, 1 + r),
'D': 'C': (1 + r, 1 - r), 'D': (0, 0)
# 节点类,每个节点保存节点状态,邻居节点列表和邻居节点个数
class Node:
def __init__(self):
if random.random() < 0.5:
self.state = 'C'
else:
self.state = 'D'
self.value = 0
self.all_value = 0
self.neighbour_number = 0
self.nb = list()
# 博弈网络 迭代更新节点状态,直至收敛
class Net:
def __init__(self, n):
self.numbers = n
self.nodes = list()
self.edges = list()
self.reward = 0
self.initNode()
# 打印状态
def printState(self):
self.getAllReward()
print('各个节点的决策和其收益:')
for i in range(self.numbers):
print('Noede%d:%c ==> reward: %f ' %
(i, self.nodes[i].state, self.nodes[i].value))
print("博弈网络总体回报为:", self.reward)
# 生成n个结点
def initNode(self):
for _ in range(self.numbers):
tmp_node = Node()
self.nodes.append(tmp_node)
print(tmp_node.state) # 打印初始状态
# 根据传入的边的列表构建网络
def buideNet(self, es):
for e in es:
self.edges.append(e)
self.updateNb()
# 更新每个节点的邻居
def updateNb(self):
for a, b in self.edges:
a.nb.append(self.nodes.index(b))
b.nb.append(self.nodes.index(a))
for i in range(self.numbers):
self.nodes[i].neighbour_number = len(self.nodes[i].nb)
# 计算每个结点的平均收益,每条边的收益和/边数
def calValue(self):
for i in range(self.numbers):
self.nodes[i].all_value = 0
for a, b in self.edges:
a.all_value += rewardMat[a.state][b.state][0]
b.all_value += rewardMat[a.state][b.state][1]
for i in range(self.numbers):
self.nodes[i].value = self.nodes[i].all_value / self.nodes[i].neighbour_number
# 每次改变一个参与人的策略,增加自己的收益
# 根据是否有节点发生变化返回是否发生改变的标志
def updateState(self):
self.calValue()
flag = False
for i in range(self.numbers):
if self.nodes[i].state == 'C':
reward1 = self.getReward(i)
self.nodes[i].state = 'D'
reward2 = self.getReward(i)
if reward2 <= reward1:
self.nodes[i].state = 'C'
continue
flag = True
elif self.nodes[i].state == 'D':
reward1 = self.getReward(i)
self.nodes[i].state = 'C'
reward2 = self.getReward(i)
if reward2 <= reward1:
self.nodes[i].state = 'D'
continue
flag = True
return flag
# 计算单个结点的收益,某节点的所有边的收益/邻居个数
def getReward(self, i):
all_value = 0
for s in self.nodes[i].nb:
all_value += rewardMat[self.nodes[i].state][self.nodes[s].state][0]
value = all_value / self.nodes[i].neighbour_number
return value
# 获得博弈网络的总收益
def getAllReward(self):
for a, b in self.edges:
self.reward += sum(rewardMat[a.state][b.state])
return self.reward
if __name__ == '__main__':
net = Net(15)
# 博弈网络中边的集合
edge_list = [(0, 1), (0, 2), (0, 6), (0, 7),
(1, 2), (1, 4), (1, 9),
(2, 8), (2, 10), (2, 11),
(3, 5), (3, 12),
(4, 14),
(5, 13),
(6, 11), (6, 14),
(8, 9),
(12, 14)
]
net.buideNet((net.nodes[a], net.nodes[b] for a, b in edge_list))
# 循环更新节点状态,直至每个人都不愿改变自己的决策
while net.updateState():
net.printState() # 打印中间状态
net.printState()
以上是关于智能控制导论雪堆博弈-最小节点覆盖问题的主要内容,如果未能解决你的问题,请参考以下文章
强化学习|多智能体深度强化学习(博弈论—>多智能体强化学习)