判断点是否在三角形内转
Posted
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了判断点是否在三角形内转相关的知识,希望对你有一定的参考价值。
概述
给定三角形ABC和一点P(x,y,z),判断点P是否在ABC内。这是游戏设计中一个常见的问题。需要注意的是,这里假定点和三角形位于同一个平面内。
本文介绍三种不同的方法,由浅入深
一 内角和法
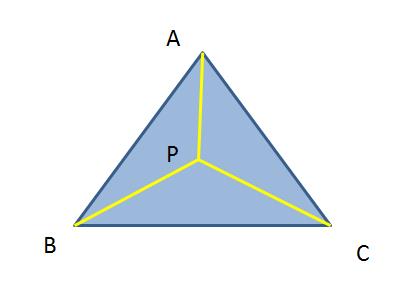
连接点P和三角形的三个顶点得到三条线段PA,PB和PC,求出这三条线段与三角形各边的夹角,如果所有夹角之和为180度,那么点P在三角形内,否则不在,此法直观,但效率低下。
二 同向法
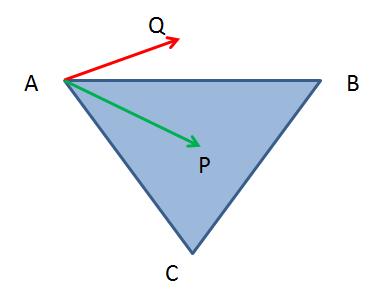
假设点P位于三角形内,会有这样一个规律,当我们沿着ABCA的方向在三条边上行走时,你会发现点P始终位于边AB,BC和CA的右侧。我们就利用这一点,但是如何判断一个点在线段的左侧还是右侧呢?我们可以从另一个角度来思考,当选定线段AB时,点C位于AB的右侧,同理选定BC时,点A位于BC的右侧,最后选定CA时,点B位于CA的右侧,所以当选择某一条边时,我们只需验证点P与该边所对的点在同一侧即可。问题又来了,如何判断两个点在某条线段的同一侧呢?可以通过叉积来实现,连接PA,将PA和AB做叉积,再将CA和AB做叉积,如果两个叉积的结果方向一致,那么两个点在同一测。判断两个向量的是否同向可以用点积实现,如果点积大于0,则两向量夹角是锐角,否则是钝角。
代码如下,为了实现程序功能,添加了一个Vector3类,该类表示三维空间中的一个向量。

// 3D vector class Vector3 { public: Vector3(float fx, float fy, float fz) :x(fx), y(fy), z(fz) { }
// Subtract Vector3 operator - (const Vector3& v) const { return Vector3(x - v.x, y - v.y, z - v.z) ; }
// Dot product float Dot(const Vector3& v) const { return x * v.x + y * v.y + z * v.z ; }
// Cross product Vector3 Cross(const Vector3& v) const { return Vector3( y * v.z - z * v.y, z * v.x - x * v.z, x * v.y - y * v.x ) ; }
public: float x, y, z ; };
// Determine whether two vectors v1 and v2 point to the same direction // v1 = Cross(AB, AC) // v2 = Cross(AB, AP) bool SameSide(Vector3 A, Vector3 B, Vector3 C, Vector3 P) { Vector3 AB = B - A ; Vector3 AC = C - A ; Vector3 AP = P - A ;
Vector3 v1 = AB.Cross(AC) ; Vector3 v2 = AB.Cross(AP) ;
// v1 and v2 should point to the same direction return v1.Dot(v2) >= 0 ; }
// Same side method // Determine whether point P in triangle ABC bool PointinTriangle1(Vector3 A, Vector3 B, Vector3 C, Vector3 P) { return SameSide(A, B, C, P) && SameSide(B, C, A, P) && SameSide(C, A, B, P) ; }
三 重心法
上面这个方法简单易懂,速度也快,下面这个方法速度更快,只是稍微多了一点数学而已
三角形的三个点在同一个平面上,如果选中其中一个点,其他两个点不过是相对该点的位移而已,比如选择点A作为起点,那么点B相当于在AB方向移动一段距离得到,而点C相当于在AC方向移动一段距离得到。
所以对于平面内任意一点,都可以由如下方程来表示
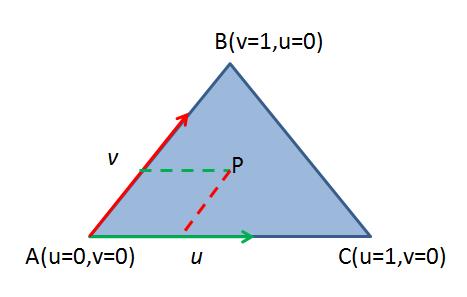
P = A + u * (C – A) + v * (B - A) // 方程1
如果系数u或v为负值,那么相当于朝相反的方向移动,即BA或CA方向。那么如果想让P位于三角形ABC内部,u和v必须满足什么条件呢?有如下三个条件
u >= 0
v >= 0
u + v <= 1
几个边界情况,当u = 0且v = 0时,就是点A,当u = 0,v = 1时,就是点B,而当u = 1, v = 0时,就是点C
整理方程1得到P – A = u(C - A) + v(B - A)
令v0 = C – A, v1 = B – A, v2 = P – A,则v2 = u * v0 + v * v1,现在是一个方程,两个未知数,无法解出u和v,将等式两边分别点乘v0和v1的到两个等式
(v2) • v0 = (u * v0 + v * v1) • v0
(v2) • v1 = (u * v0 + v * v1) • v1
注意到这里u和v是数,而v0,v1和v2是向量,所以可以将点积展开得到下面的式子。
v2 • v0 = u * (v0 • v0) + v * (v1 • v0) // 式1
v2 • v1 = u * (v0 • v1) + v * (v1• v1) // 式2
解这个方程得到
u = ((v1•v1)(v2•v0)-(v1•v0)(v2•v1)) / ((v0•v0)(v1•v1) - (v0•v1)(v1•v0))
v = ((v0•v0)(v2•v1)-(v0•v1)(v2•v0)) / ((v0•v0)(v1•v1) - (v0•v1)(v1•v0))
是时候上代码了,这段代码同样用到上面的Vector3类
// Determine whether point P in triangle ABC bool PointinTriangle(Vector3 A, Vector3 B, Vector3 C, Vector3 P) { Vector3 v0 = C - A ; Vector3 v1 = B - A ; Vector3 v2 = P - A ;
float dot00 = v0.Dot(v0) ; float dot01 = v0.Dot(v1) ; float dot02 = v0.Dot(v2) ; float dot11 = v1.Dot(v1) ; float dot12 = v1.Dot(v2) ;
float inverDeno = 1 / (dot00 * dot11 - dot01 * dot01) ;
float u = (dot11 * dot02 - dot01 * dot12) * inverDeno ; if (u < 0 || u > 1) // if u out of range, return directly { return false ; }
float v = (dot00 * dot12 - dot01 * dot02) * inverDeno ; if (v < 0 || v > 1) // if v out of range, return directly { return false ; }
return u + v <= 1 ; }
以上是关于判断点是否在三角形内转的主要内容,如果未能解决你的问题,请参考以下文章