动态规划解决机器人网格路径问题!
Posted pushy
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了动态规划解决机器人网格路径问题!相关的知识,希望对你有一定的参考价值。
想获得更好的排版,请移步个人博客: https://pushy.site
无障碍物
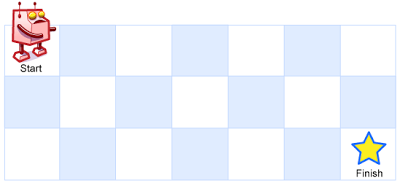
题目(原题见 LeetCode - 62. 不同路径):一个机器人位于一个 m x n 网格的左上角 (起始点在下图中标记为“Start” )。机器人每次只能向下或者向右移动一步。机器人试图达到网格的右下角(在下图中标记为“Finish”)。问总共有多少条不同的路径?
示例 1:
输入: m = 3, n = 2
输出: 3
解释:
从左上角开始,总共有 3 条路径可以到达右下角。
1. 向右 -> 向右 -> 向下
2. 向右 -> 向下 -> 向右
3. 向下 -> 向右 -> 向右通过观察我们我们得出以下两个特点:
- 机器人所在的正东方向和正南方向,只能有一条路径可以走,即直走。
- 到某个点的路径 = 到该点上一个单位的点路径 + 到该点左一个单位的点路径。
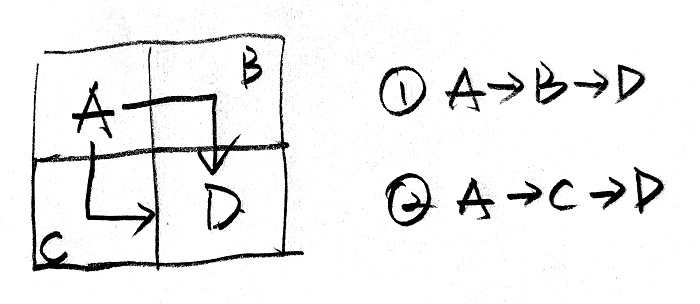
为了验证第二个特点,我们假设网格是 2 * 2。如下图所示,从 A 到达 D 点的路径总和就等于 A 点到达 B 点的路径 + 到达 C 点的路径总和。
这样,我们不难写出递归代码:
public int solution(int m, int n)
if (m <= 0 || n <= 0)
return 0;
else if (m == 1 || n == 1)
return 1;
int result = 0;
result += rec(m - 1, n);
result += rec(m, n - 1);
return result;
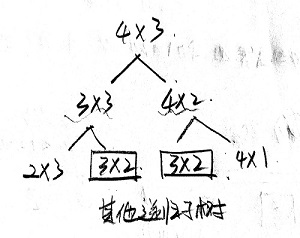
递归代码虽然简单,但是和斐波那契数列递归实现一样,会出现重复子树的情况。例如求 4 * 3 的路径时,就出现了递归计算重复子树的情况:
和斐波那契一样,可以用动态规划来优化复杂度,不难写出状态转移方程为:f(i, j) = f(i - 1)(j) + f(i)(j - 1)
public int solution(int m, int n)
int[][] dp = new int[n][m];
for (int i = 0; i < n; i++) // 第一列
dp[i][0] = 1;
for (int i = 0; i < m; i++) // 第一行
dp[0][i] = 1;
for (int i = 1; i < n; i++)
for (int j = 1; j < m; j++)
dp[i][j] = dp[i - 1][j] + dp[i][j - 1];
return dp[n - 1][m - 1];
有障碍物
现在,保持和无障碍物的题意,在网格中设置了障碍物(机器人无法越过障碍物),求到终点的路径总和。原题见 LeetCode - 63. 不同路径 II
虽然增加了障碍物,但是前面总结的两个特点还是适用的。但是,需要做一些改变:
- 对于正东和正南的方向路径,一旦遇到障碍物(1),代表无法通过,则后面的路径全是 0;
- 第二个特点仅使用于该点不是障碍物;如果为障碍物,则直接将该点路径设为 0,代表从该点无法通过。
LeetCode 官方图解如下:
public int uniquePathsWithObstacles(int[][] matrix)
if (matrix == null) return 0;
int n = matrix.length;
int m = matrix[0].length;
int[][] dp = new int[n][m];
dp[0][0] = matrix[0][0] == 0 ? 1 : 0;
if (dp[0][0] == 0)
return 0;
// 第一列
for (int i = 1; i < n; i++)
if (matrix[i][0] != 1)
dp[i][0] = dp[i - 1][0];
// 第一行
for (int j = 1; j < m; j++)
if (matrix[0][j] != 1)
dp[0][j] = dp[0][j - 1];
for (int i = 1; i < n; i++)
for (int j = 1; j < m; j++)
if (matrix[i][j] != 1)
dp[i][j] = dp[i - 1][j] + dp[i][j - 1];
return dp[n - 1][m - 1];
以上是关于动态规划解决机器人网格路径问题!的主要内容,如果未能解决你的问题,请参考以下文章