VINS-Fusion - 编译及使用(单/双目+IMU)
Posted Techblog of HaoWANG
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了VINS-Fusion - 编译及使用(单/双目+IMU)相关的知识,希望对你有一定的参考价值。
1. VINS-Fusion 基本介绍
 https://github.com/HKUST-Aerial-Robotics/VINS-Fusion
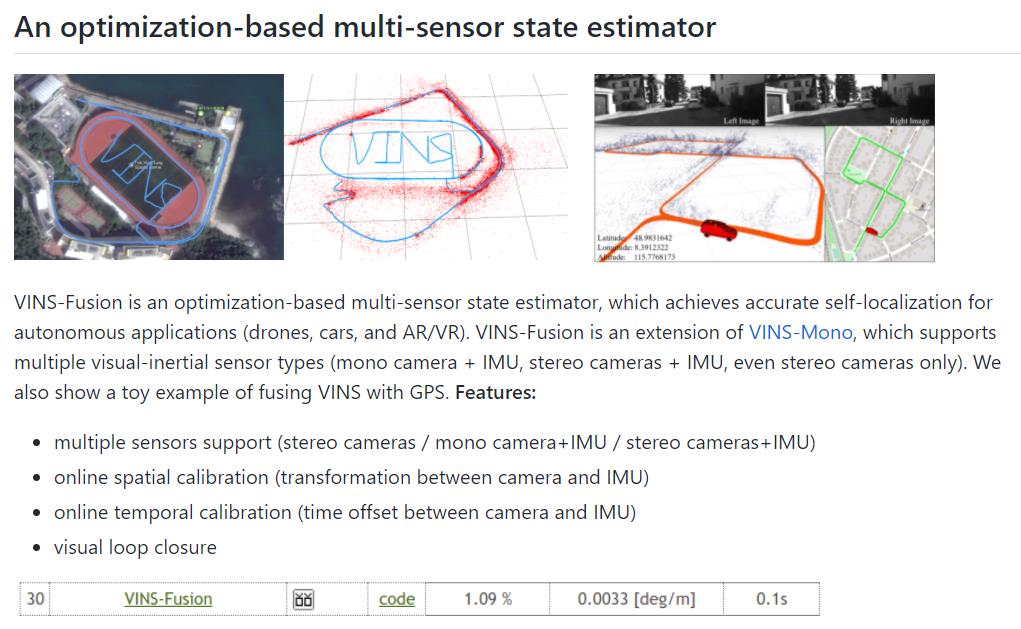
https://github.com/HKUST-Aerial-Robotics/VINS-FusionVINS-Fusion 是继 VINS-Mono 和 VINS-Mobile(单目视觉惯导 SLAM 方案)后,香港科技大学沈劭劼老师开源的双目视觉惯导 SLAM 方案,VINS-Fusion 是一种基于优化的多传感器状态估计器,可实现自主应用(无人机,汽车和 AR / VR)的精确自定位。 VINS-Fusion 是 VINS-Mono 的扩展,支持多种视觉惯性传感器类型(单目摄像机+ IMU,双目摄像机+ IMU,甚至仅限双目摄像机)。开源项目组还展示了将 VINS 与 GPS 融合的模组示例。
特征如下:
- 多传感器支持(立体摄像机/单声道摄像机+ IMU /立体摄像机+ IMU)
- 在线空间校准(相机和 IMU 之间的转换)
- 在线时间校准(相机和 IMU 之间的时间偏移)
- 视觉循环闭合
3. 公开数据集测试
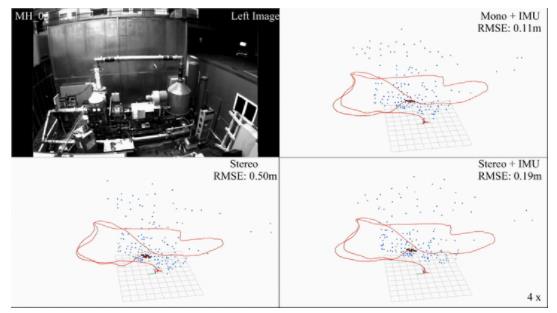
EuRoC Example
Download EuRoC MAV Dataset to YOUR_DATASET_FOLDER. Take MH_01 for example, you can run VINS-Fusion with three sensor types (monocular camera + IMU, stereo cameras + IMU and stereo cameras). Open four terminals, run vins odometry, visual loop closure(optional), rviz and play the bag file respectively. Green path is VIO odometry; red path is odometry under visual loop closure.
3.1 Monocualr camera + IMU
roslaunch vins vins_rviz.launch
rosrun vins vins_node ~/catkin_ws/src/VINS-Fusion/config/euroc/euroc_mono_imu_config.yaml
(optional) rosrun loop_fusion loop_fusion_node ~/catkin_ws/src/VINS-Fusion/config/euroc/euroc_mono_imu_config.yaml
rosbag play YOUR_DATASET_FOLDER/MH_01_easy.bag
3.2 Stereo cameras + IMU
roslaunch vins vins_rviz.launch
rosrun vins vins_node ~/catkin_ws/src/VINS-Fusion/config/euroc/euroc_stereo_imu_config.yaml
(optional) rosrun loop_fusion loop_fusion_node ~/catkin_ws/src/VINS-Fusion/config/euroc/euroc_stereo_imu_config.yaml
rosbag play YOUR_DATASET_FOLDER/MH_01_easy.bag
3.3 Stereo cameras
roslaunch vins vins_rviz.launch
rosrun vins vins_node ~/catkin_ws/src/VINS-Fusion/config/euroc/euroc_stereo_config.yaml
(optional) rosrun loop_fusion loop_fusion_node ~/catkin_ws/src/VINS-Fusion/config/euroc/euroc_stereo_config.yaml
rosbag play YOUR_DATASET_FOLDER/MH_01_easy.bag
4. KITTI Example
4.1 KITTI Odometry (Stereo)
Download KITTI Odometry dataset to YOUR_DATASET_FOLDER. Take sequences 00 for example, Open two terminals, run vins and rviz respectively. (We evaluated odometry on KITTI benchmark without loop closure funtion)
roslaunch vins vins_rviz.launch
(optional) rosrun loop_fusion loop_fusion_node ~/catkin_ws/src/VINS-Fusion/config/kitti_odom/kitti_config00-02.yaml
rosrun vins kitti_odom_test ~/catkin_ws/src/VINS-Fusion/config/kitti_odom/kitti_config00-02.yaml YOUR_DATASET_FOLDER/sequences/00/
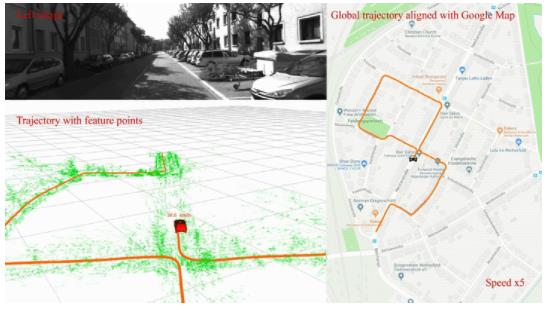
4.2 KITTI GPS Fusion (Stereo + GPS)
Download KITTI raw dataset to YOUR_DATASET_FOLDER. Take 2011_10_03_drive_0027_synced for example. Open three terminals, run vins, global fusion and rviz respectively. Green path is VIO odometry; blue path is odometry under GPS global fusion.
roslaunch vins vins_rviz.launch
rosrun vins kitti_gps_test ~/catkin_ws/src/VINS-Fusion/config/kitti_raw/kitti_10_03_config.yaml YOUR_DATASET_FOLDER/2011_10_03_drive_0027_sync/
rosrun global_fusion global_fusion_node
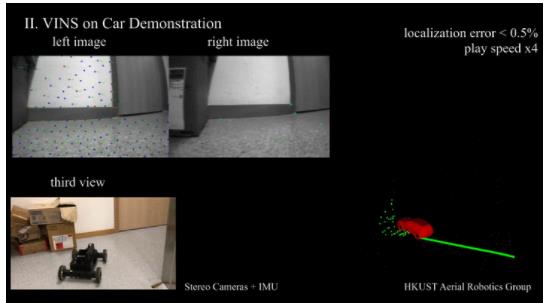
5. VINS-Fusion on car demonstration
Download car bag to YOUR_DATASET_FOLDER. Open four terminals, run vins odometry, visual loop closure(optional), rviz and play the bag file respectively. Green path is VIO odometry; red path is odometry under visual loop closure.
roslaunch vins vins_rviz.launch
rosrun vins vins_node ~/catkin_ws/src/VINS-Fusion/config/vi_car/vi_car.yaml
(optional) rosrun loop_fusion loop_fusion_node ~/catkin_ws/src/VINS-Fusion/config/vi_car/vi_car.yaml
rosbag play YOUR_DATASET_FOLDER/car.bag
以上是关于VINS-Fusion - 编译及使用(单/双目+IMU)的主要内容,如果未能解决你的问题,请参考以下文章