三维视觉 | 04 双目定位/测距原理
Posted AI 菌
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了三维视觉 | 04 双目定位/测距原理相关的知识,希望对你有一定的参考价值。
文章目录
一、双目视觉模型
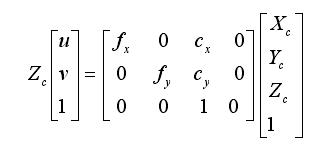
由上一节:摄像机原理及坐标系转换 可知,单个相机的像素坐标系与相机坐标系的关系为:
仅仅通过以上的矩阵关系,是无法准确求出目标点的三维位置的,可见单目测距是有局限性的。更一般地,通常会通过双目视觉系统来模拟人的“双眼”,从而判断距离的远近。
在双目视觉的实际应用中,大多数均采用基于平行光轴的视觉模型,如下图所示,
O
l
O_l
Ol 和
O
r
O_r
Or 分别是左右相机的光心,空间中的点
P
(
X
c
,
Y
c
,
Z
c
)
P(X_c, Y_c, Z_c)
P(Xc,Yc,Zc)为待求目标点。

假如我们以左相机的光心为世界坐标系的原点,那么对左相机进行建模可得:

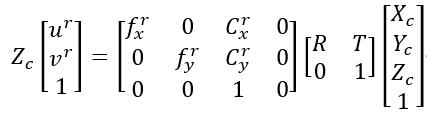
假设右相机相对左相机的旋转矩阵和平移矩阵分别为 R 和 T,那么对右相机进行建模可得:
已知相机参数,旋转平移矩阵,左右两图中对应的像素
(
u
l
,
u
l
)
(u^l, u^l)
(ul,ul)和
(
u
r
,
u
r
)
(u^r, u^r)
(ur,ur),通过以上两个式子,其实就可以求解空间中的点
P
(
X
c
,
Y
c
,
Z
c
)
P(X_c, Y_c, Z_c)
P(Xc,Yc,Zc)。
那么,下面就具体来谈谈双目定位/测距的过程!
二、双目标定
通过双目标定可以获取左右相机自己的内部参数 R 和外部参数 T,具体获取方法可见:
三、消除畸变与图像校正
(1) 图像校正
- 径向畸变:由于镜头形状造成的,比如正方形物体经过圆形的镜头,在图像平面上呈现是弯曲的。并且随着向边缘的移动,畸变越来越严重。
消除方法:由于实际过程中畸变较小,可以用r=0位置进行泰勒级数展开:

- 切向畸变:当镜头不完全平行于图像平面的时候产生的。主要是在镜头制造过程中产生的。
消除方法:用两个参数P1和P2来描述

(2)图像校正
调整摄像机之间的角度和距离,输出行对准的校正图像。
四. 双目匹配
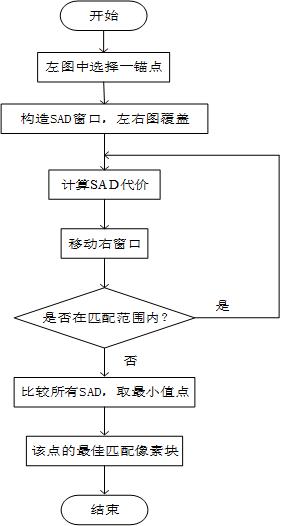
SAD(Sum of absolute differences)是一种简单的图像匹配算法,其基本流程为:
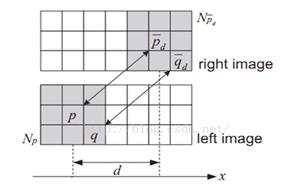
- 构造一个小窗口,类似与卷积核。
- 用窗口覆盖左边的图像,选择出窗口覆盖区域内的所有像素点。
- 同样用窗口覆盖右边的图像并选择出覆盖区域的像素点。
- 左边覆盖区域减去右边覆盖区域,并求出所有像素点差的绝对值的和。
- 移动右边图像的窗口,重复3,4的动作。(这里有个搜索范围,超过这个范围跳出)
- 找到这个范围内SAD值最小的窗口,即找到了左边图像的最佳匹配的像素块。
以上是关于三维视觉 | 04 双目定位/测距原理的主要内容,如果未能解决你的问题,请参考以下文章