VINS-Fusion - 简介
Posted Techblog of HaoWANG
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了VINS-Fusion - 简介相关的知识,希望对你有一定的参考价值。
目录
1. VINS-Fusion 基本介绍
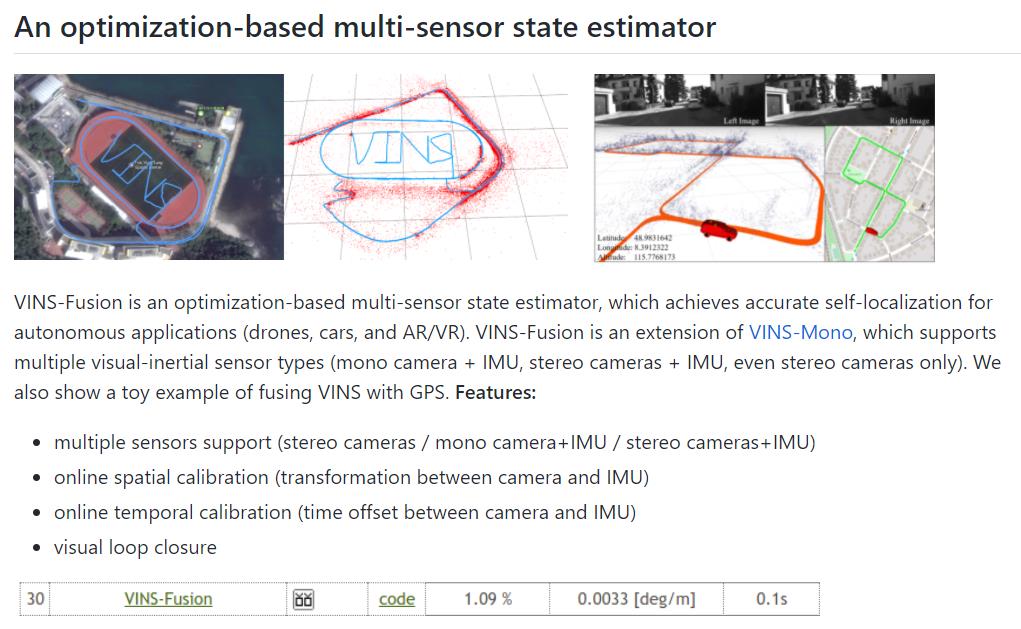
VINS-Fusion 是继 VINS-Mono 和 VINS-Mobile(单目视觉惯导 SLAM 方案)后,香港科技大学沈劭劼老师开源的双目视觉惯导 SLAM 方案,VINS-Fusion 是一种基于优化的多传感器状态估计器,可实现自主应用(无人机,汽车和 AR / VR)的精确自定位。 VINS-Fusion 是 VINS-Mono 的扩展,支持多种视觉惯性传感器类型(单目摄像机+ IMU,双目摄像机+ IMU,甚至仅限双目摄像机)。开源项目组还展示了将 VINS 与 GPS 融合的模组示例。
特征如下:
- 多传感器支持(立体摄像机/单声道摄像机+ IMU /立体摄像机+ IMU)
- 在线空间校准(相机和 IMU 之间的转换)
- 在线时间校准(相机和 IMU 之间的时间偏移)
- 视觉循环闭合
VINS-Fusion 如何整合
在 ZED上运行 VINS-Fusion,请依照这些步骤:
- 下载安装 ZED SDK
- 按照一般步骤安装 VINS-Fusion 。
- 运行 ROS : zed_wapper 包和 VINS-Fusion 。
快捷安装 ROS melodic (若已安装,请忽略)
cd ~
wget https://raw.githubusercontent.com/oroca/oroca-ros-pkg/master/ros_install.sh && \\
chmod 755 ./ros_install.sh && bash ./ros_install.sh catkin_ws kinetic安装 Ceres
cd ~
git clone https://ceres-solver.googlesource.com/ceres-solver
sudo apt-get -y install cmake libgoogle-glog-dev libatlas-base-dev libeigen3-dev libsuitesparse-dev
sudo add-apt-repository ppa:bzindovic/suitesparse-bugfix-1319687
sudo apt-get update && sudo apt-get install libsuitesparse-dev
mkdir ceres-bin
cd ceres-bin
cmake ../ceres-solver
make -j3
sudo make install2. 安装 ZED SDK
 https://haowang.blog.csdn.net/article/details/115401380
https://haowang.blog.csdn.net/article/details/115401380mkdir -p ~/catkin_ws/src
cd ~/catkin_ws/src
git clone https://github.com/slightech/MYNT-EYE-VINS-FUSION-Samples.git
cd ..
catkin_make
source ~/catkin_ws/devel/setup.bash
(如果安装失败,请尝试换一台系统干净的电脑或者重新安装系统与ROS)
3. 安装依赖项& 源码编译 VINS-FUSION
基本的库还有Eigen3和OpenCV,这里就不做赘述,相信从事计算机视觉算法的同学,都很熟练使用了。
然后,按照官方说明编译VINS-Fusion工程:
cd ~/catkin_ws/src
git clone https://github.com/HKUST-Aerial-Robotics/VINS-Fusion.git
cd ../
catkin_make
source ~/catkin_ws/devel/setup.bash
这个过程和ROS其他程序操作流程基本一样,不了解的同学可以学习一下《ROS机器人程序设计》。
4. 下载数据集
kmavvisualinertialdatasets – ASL Datasets https://projects.asl.ethz.ch/datasets/doku.php?id=kmavvisualinertialdatasets
https://projects.asl.ethz.ch/datasets/doku.php?id=kmavvisualinertialdatasets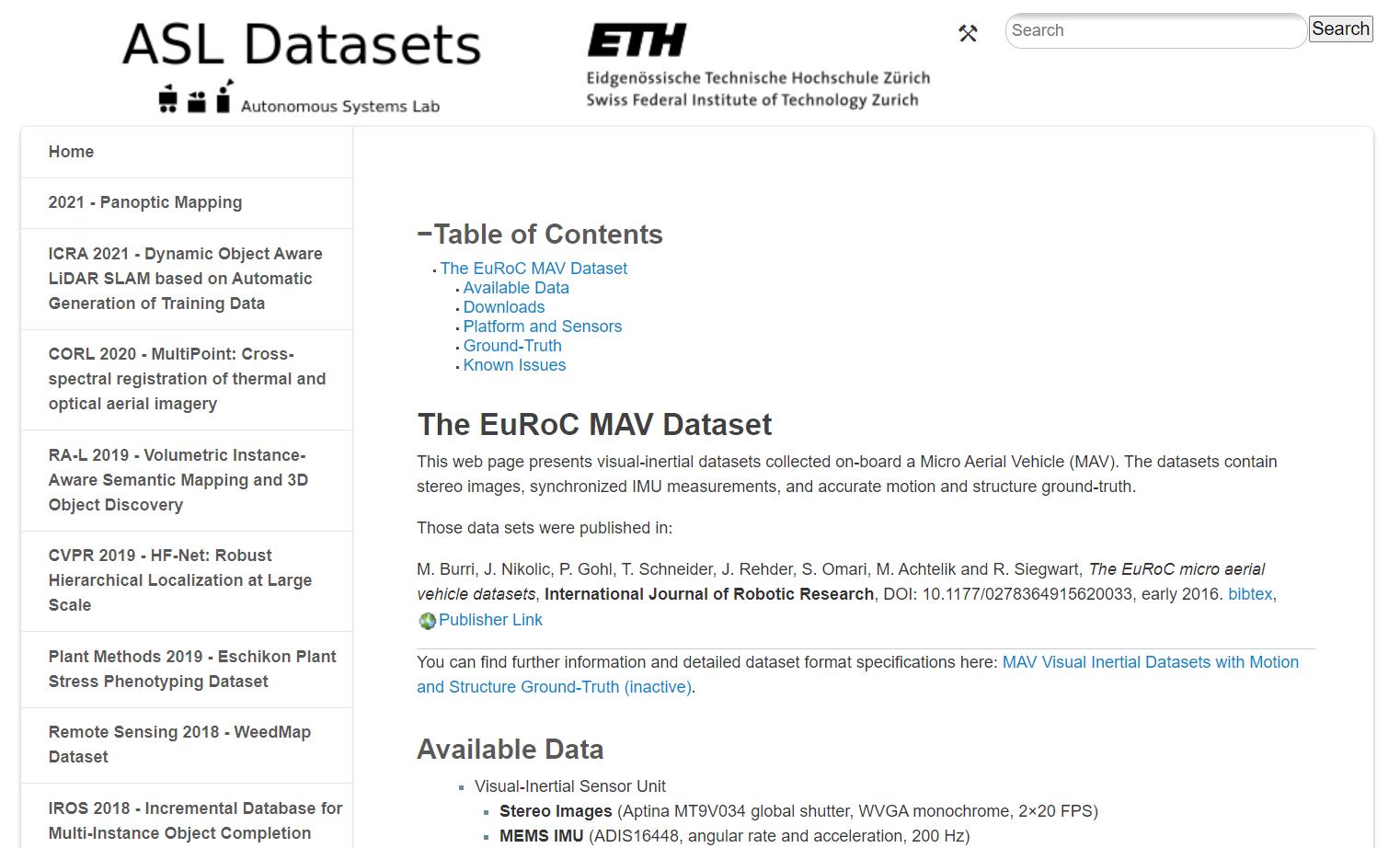

描述
Available Data
Visual-Inertial Sensor Unit
Stereo Images (Aptina MT9V034 global shutter, WVGA monochrome, 2×20 FPS)
MEMS IMU (ADIS16448, angular rate and acceleration, 200 Hz)
Shutter-centric temporal alignment
Ground-Truth
Vicon motion capture system (6D pose)
Leica MS50 laser tracker (3D position)
Leica MS50 3D structure scan
Calibration
Camera intrinsics
Camera-IMU extrinsics
Spatio-temporally aligned ground-truth


Vins-Fusion 未来发展
VINS-Fusion 当前是 KITTI Visual Odometry 榜单中排名最靠前的开源双目 VO 方案,除了单双目,其还提供 IMU, GPS 等多传感器数据的融合,让位姿估计得更加精准。相信在越来越智能化的未来,其在无人机、无人驾驶、AR/VR、物流仓储等领域都能起到自定位的技术指引、筑好智能化的基石。
以上是关于VINS-Fusion - 简介的主要内容,如果未能解决你的问题,请参考以下文章
Android 逆向类加载器 ClassLoader ( 类加载器源码简介 | BaseDexClassLoader | DexClassLoader | PathClassLoader )(代码片段
Android 逆向Linux 文件权限 ( Linux 权限简介 | 系统权限 | 用户权限 | 匿名用户权限 | 读 | 写 | 执行 | 更改组 | 更改用户 | 粘滞 )(代码片段
SpringCloud系列十一:SpringCloudStream(SpringCloudStream 简介创建消息生产者创建消息消费者自定义消息通道分组与持久化设置 RoutingKey)(代码片段
C#-WebForm-★内置对象简介★Request-获取请求对象Response相应请求对象Session全局变量(私有)Cookie全局变量(私有)Application全局公共变量Vi(代码片段