自动驾驶 4-5 Lesson 5: Lateral Dynamics of Bicycle Model
Posted 架构师易筋
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了自动驾驶 4-5 Lesson 5: Lateral Dynamics of Bicycle Model相关的知识,希望对你有一定的参考价值。
axle:车轴
lump:集中的
road inclination:斜坡

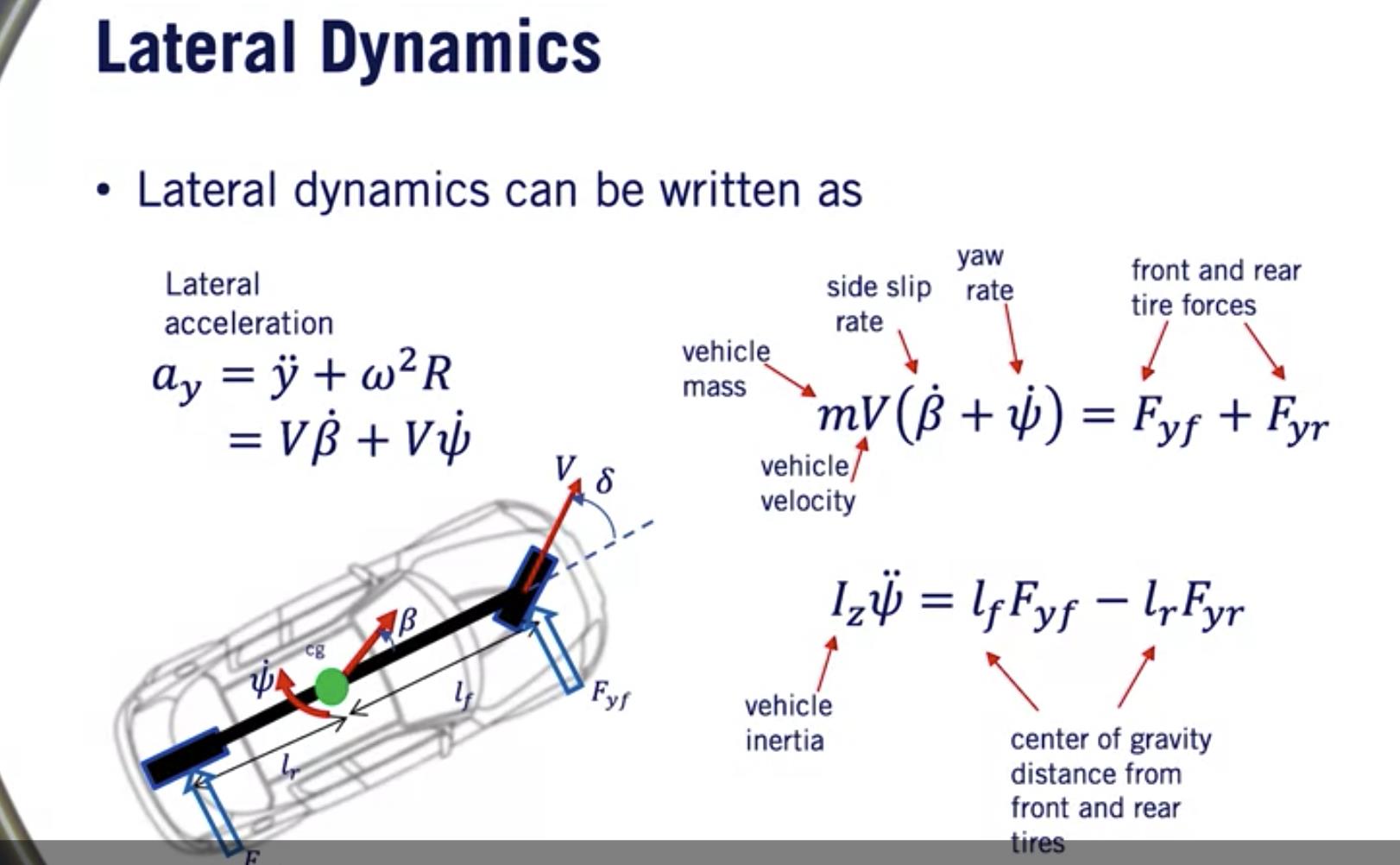
lateral: 侧面的
vehicle mass:车辆质量
yaw rate:角速度
rear tire:后轮胎
vehicle inertia:汽车惯量

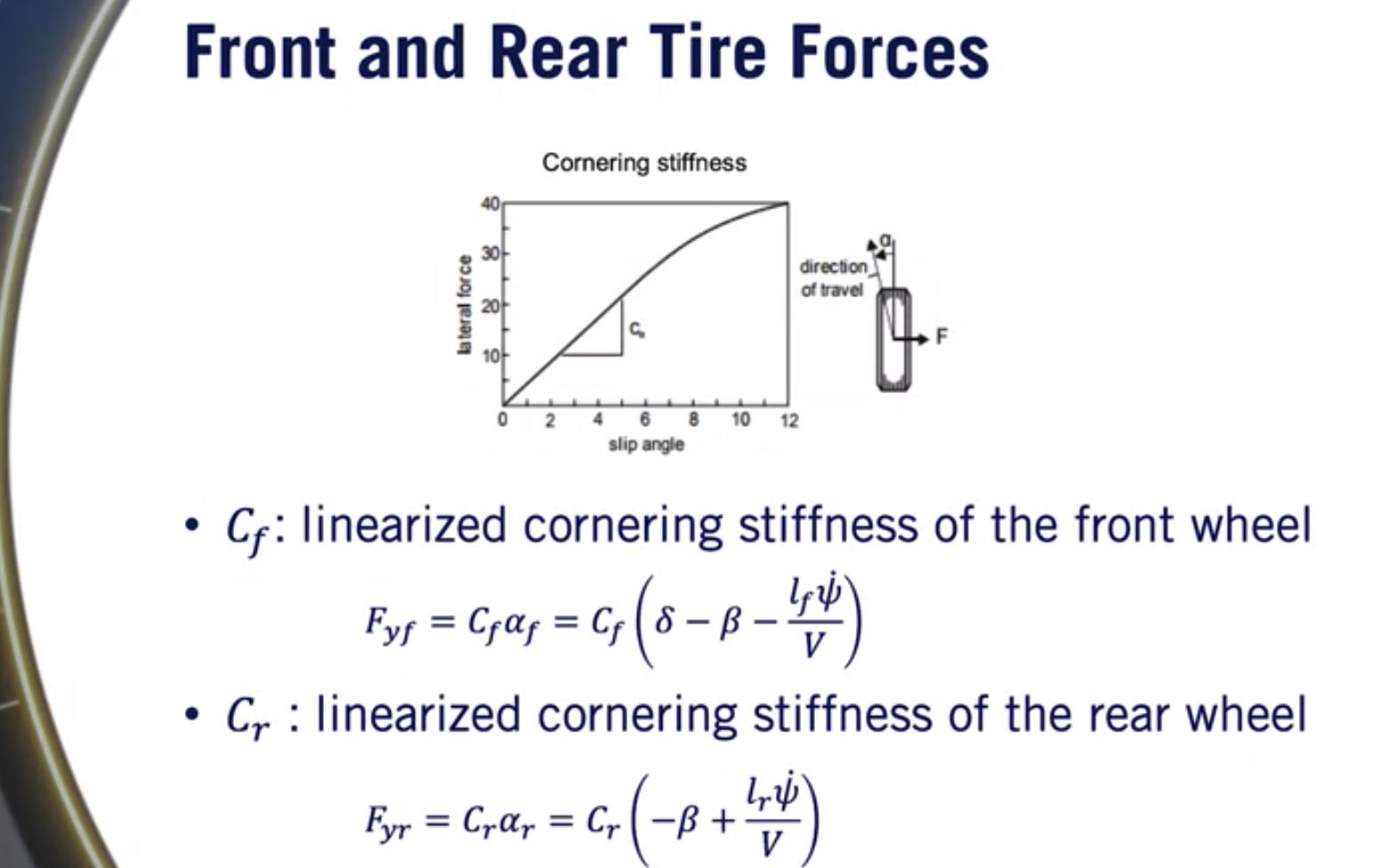
stiffness:刚度
substitue: 替换
第5课补充阅读:自行车模型的横向动力学
补充阅读:自行车模型的横向动力学
在下面的 PDF 中阅读有关自行车模型横向动力学的更多信息(第 27-44 页):
R. Rajamani (2012),“横向车辆动力学”在:车辆动力学和控制,机械工程系列,
https 😕/www.springer.com/cda/content/document/cda_downloaddocument/9781461414322-c1.pdf?SGWID =0 -0-45-1265143-p174267791。
参考
https://www.coursera.org/learn/intro-self-driving-cars/lecture/1Opvo/lesson-5-lateral-dynamics-of-bicycle-model
以上是关于自动驾驶 4-5 Lesson 5: Lateral Dynamics of Bicycle Model的主要内容,如果未能解决你的问题,请参考以下文章
自动驾驶 5-3 Lesson 3: Feedforward Speed Control
自动驾驶 5-2 Lesson 2: Longitudinal Speed Control with PID
自动驾驶 5-1 Lesson 1: Proportional-Integral-Derivative (PID) Control
自动驾驶 2-4 Lesson 4: Environment Representation