自动驾驶 5-1 Lesson 1: Proportional-Integral-Derivative (PID) Control
Posted 架构师易筋
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了自动驾驶 5-1 Lesson 1: Proportional-Integral-Derivative (PID) Control相关的知识,希望对你有一定的参考价值。

LTI linear time invariant: 线性时不变系统
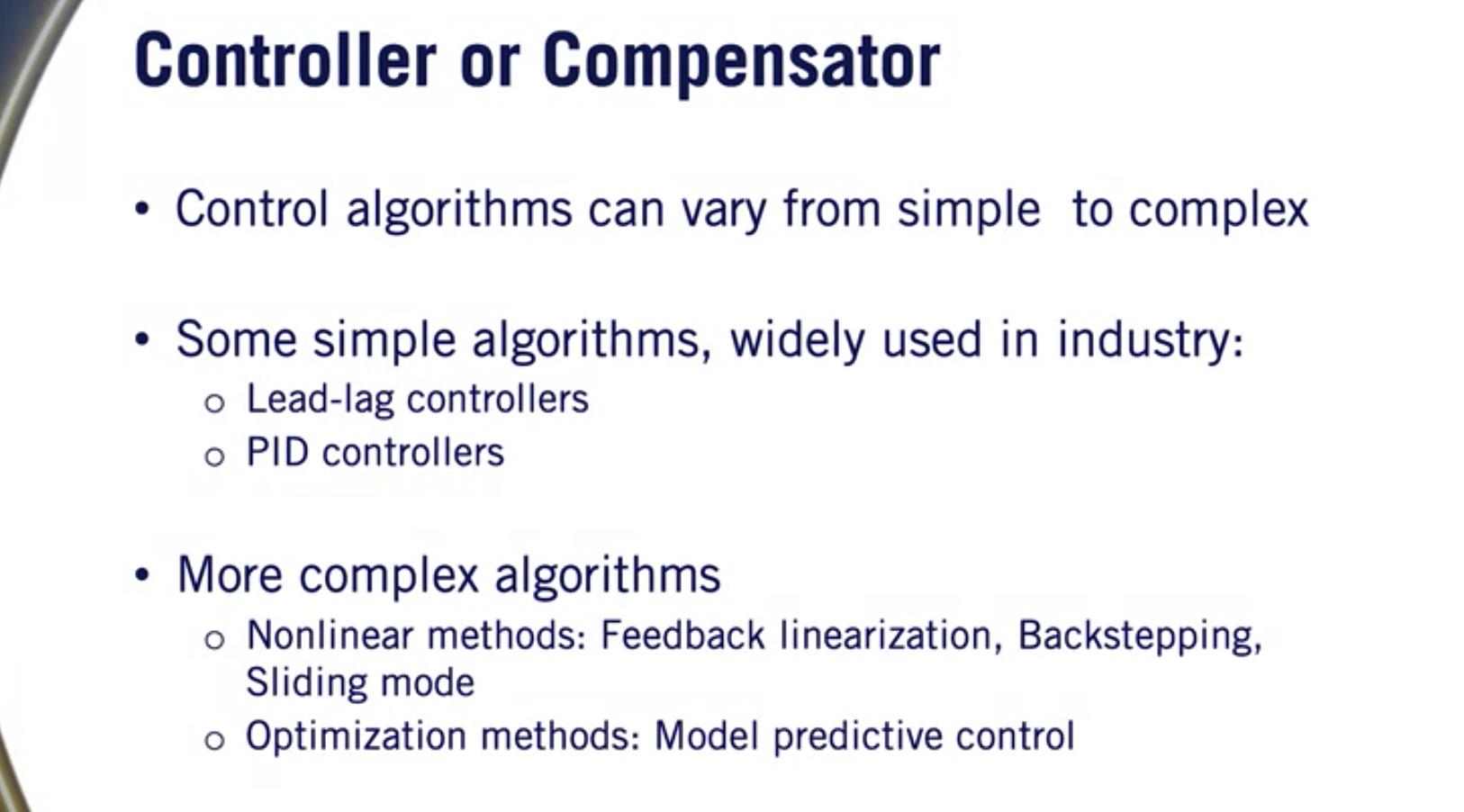
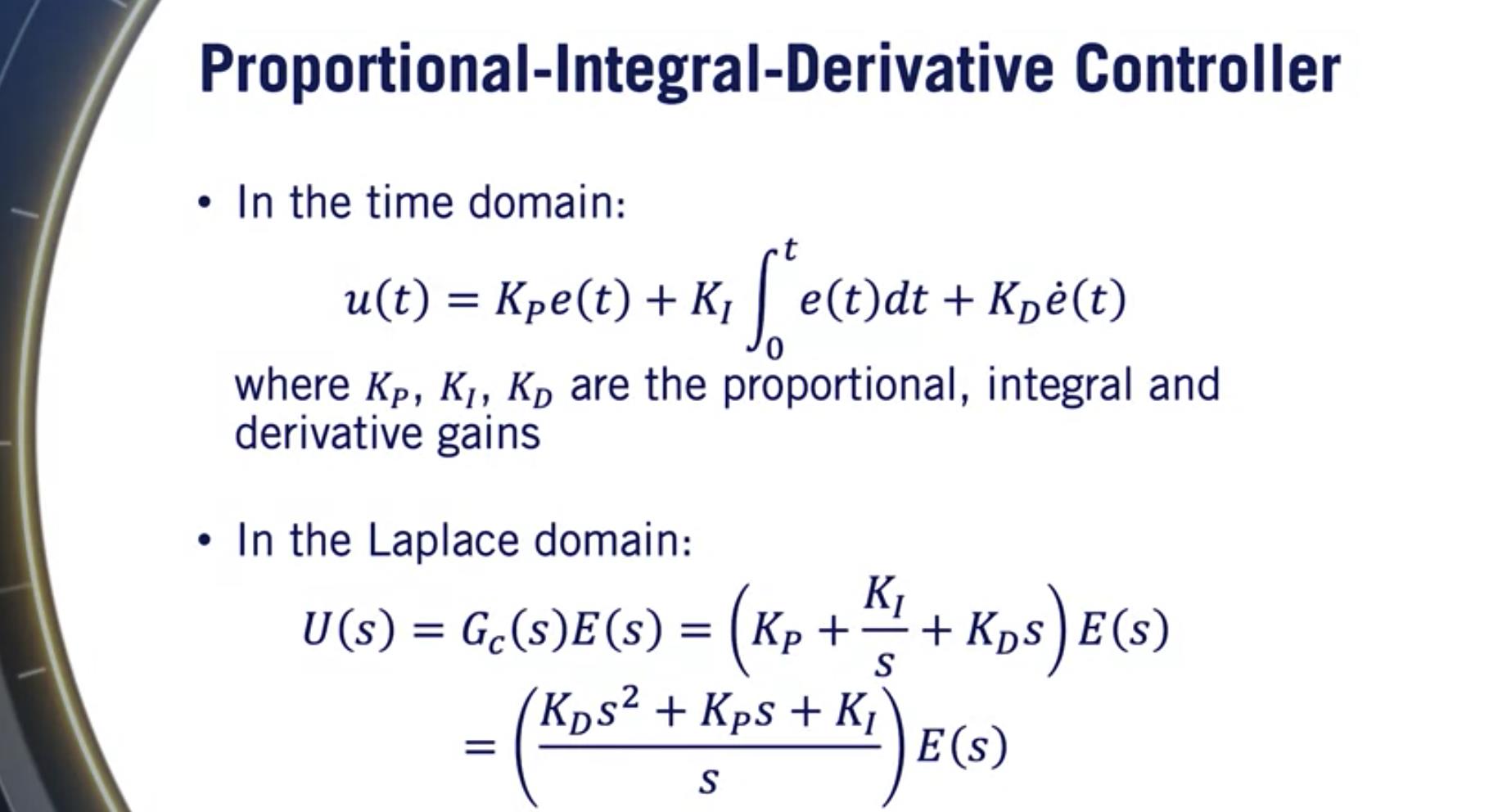
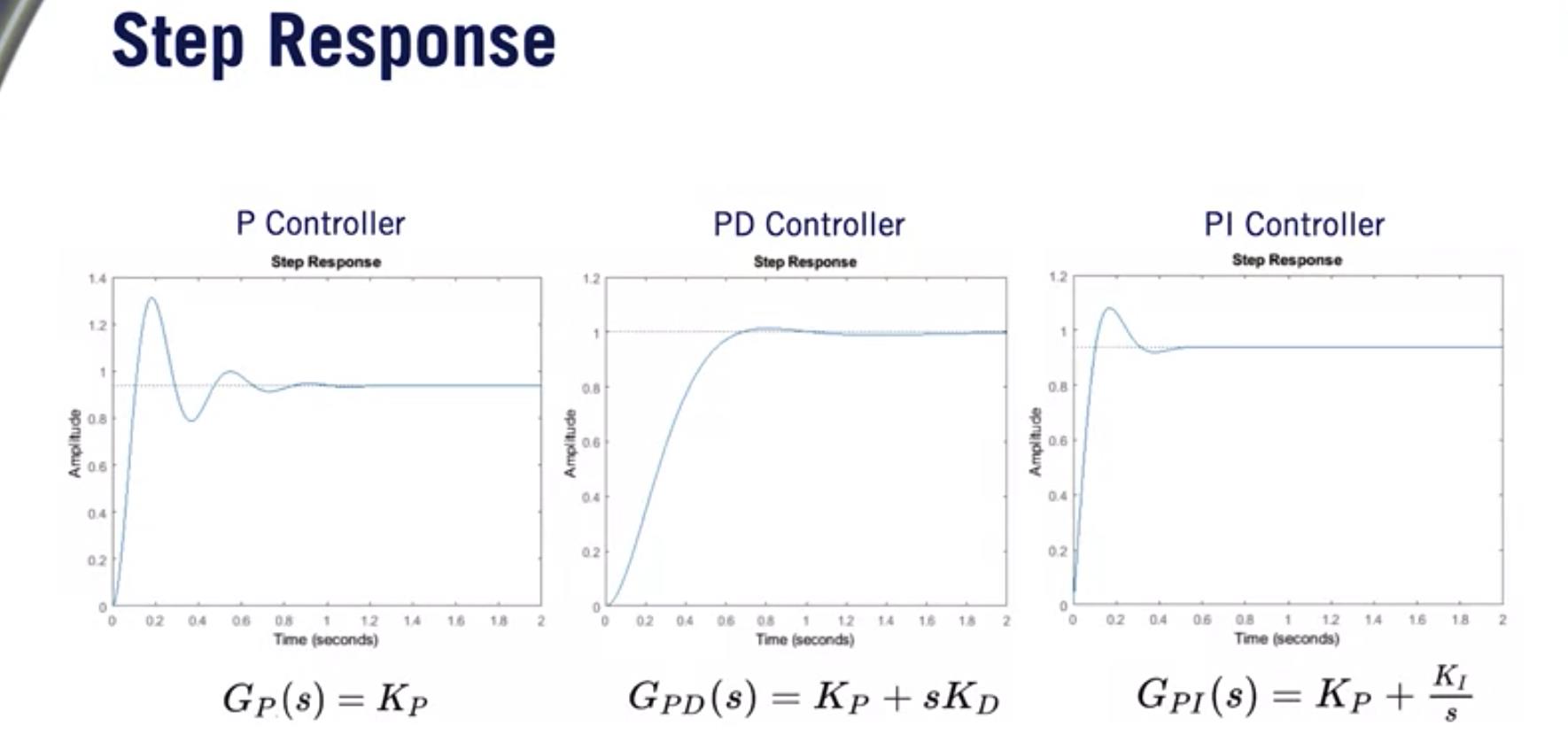
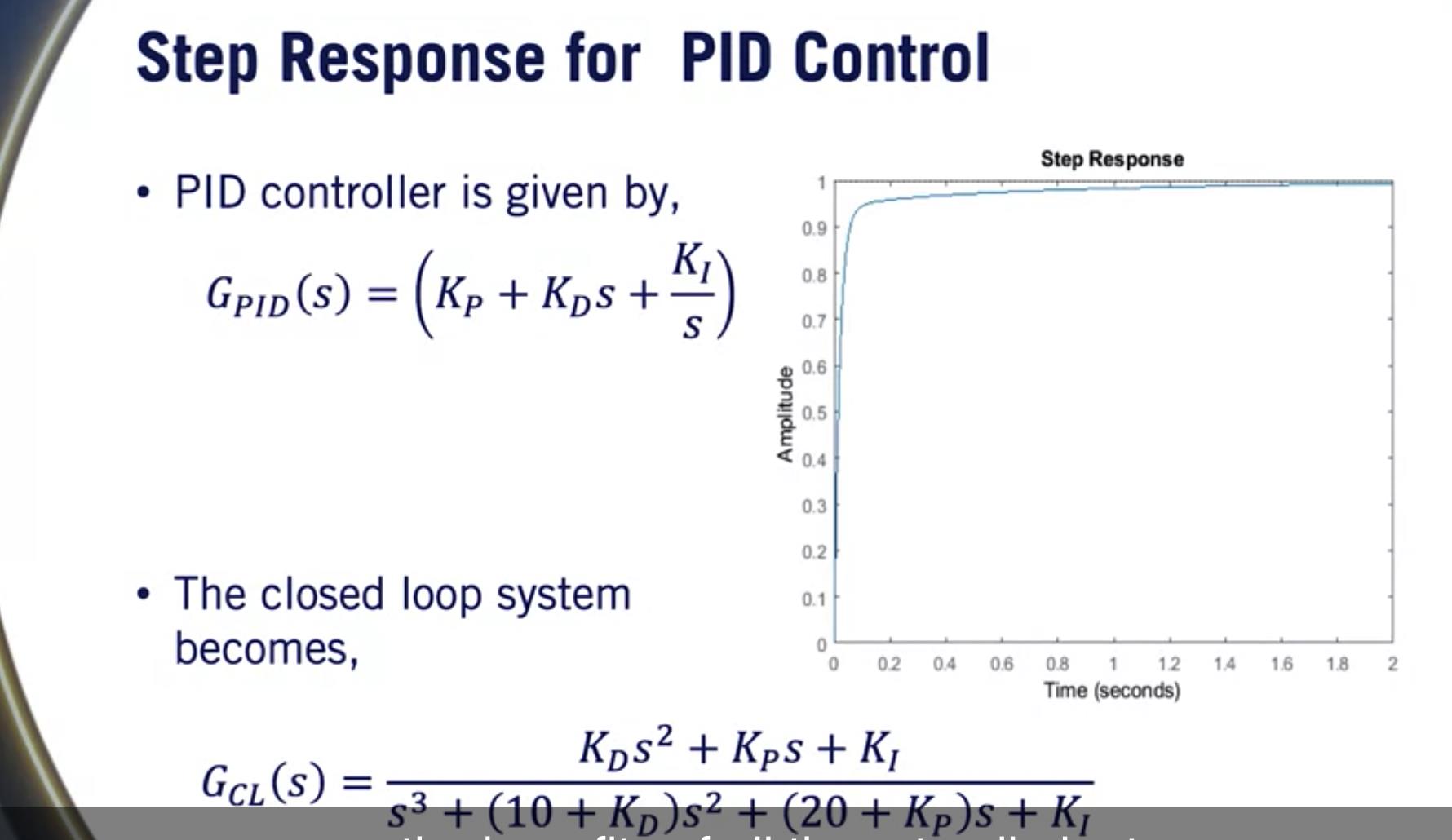
PID: proportional integral derivative: 比例
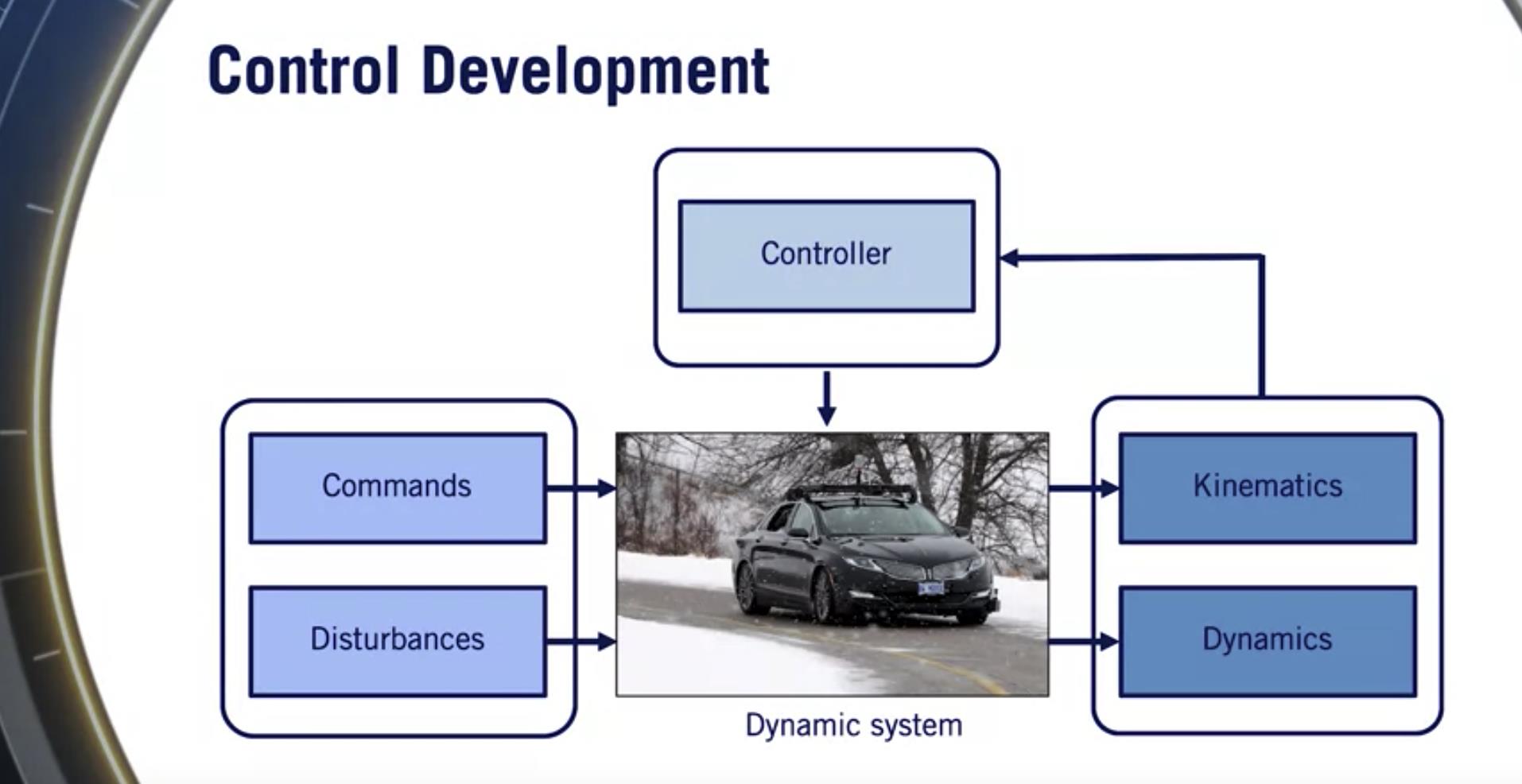
feedforward: 前馈(控制)


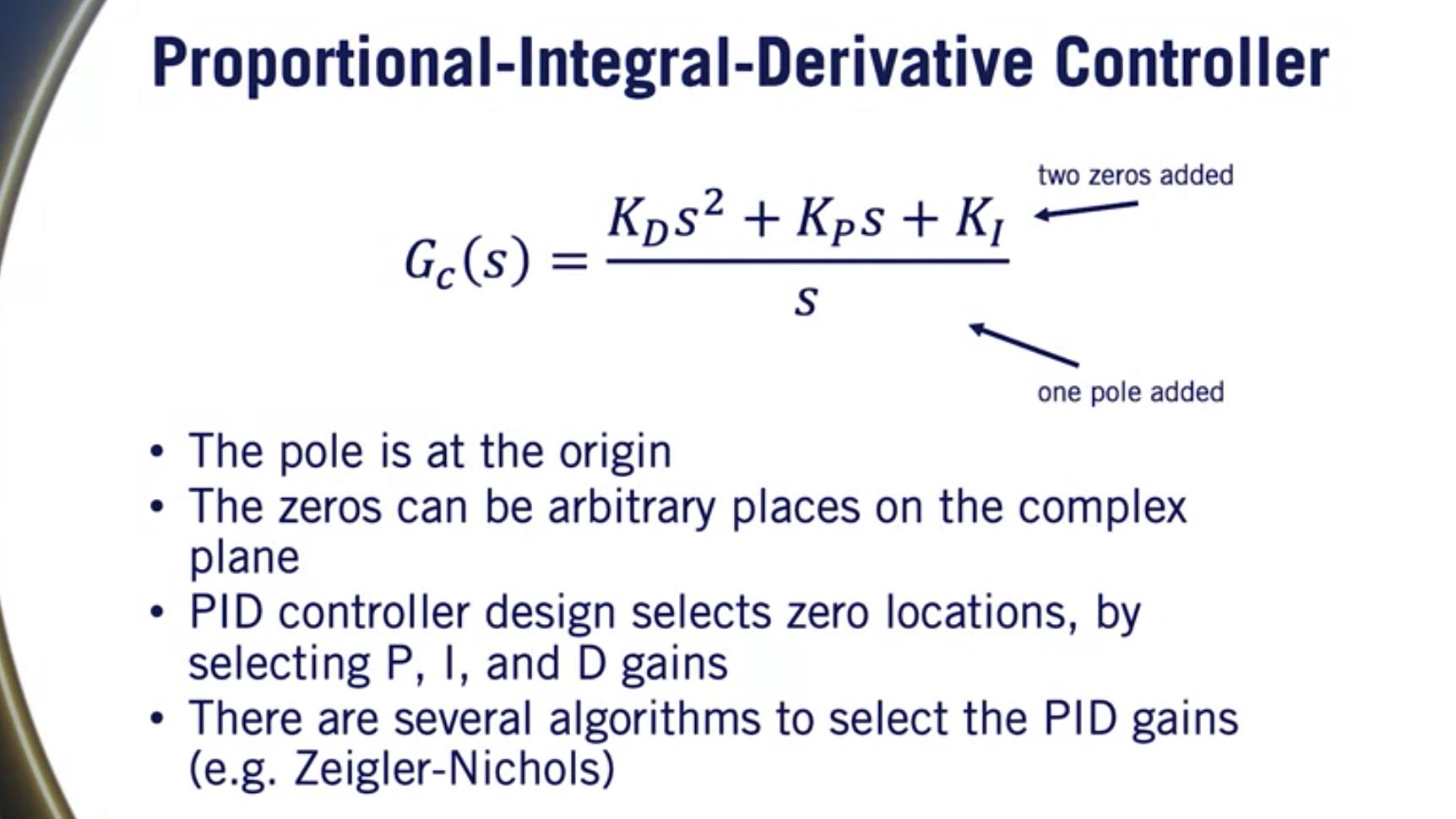
pole: 轴极, 极
第 1 课补充阅读:比例积分微分 (PID) 控制
补充阅读:比例积分微分 (PID) 控制
上一堂关于比例-积分-微分 (PID) 控制的讲座使用了拉普拉斯变换。如果您需要查看拉普拉斯变换,请查看 Coursera 上的这些视频:
-
拉普拉斯变换。计算一个计数过程的期望值 1(高等经济学院)
-
拉普拉斯变换。计算一个计数过程的期望值 2(高等经济学院)
-
拉普拉斯变换。计算一个计数过程的期望值 3(高等经济学院)
-
经典控制: Bruce Francis 教授(多伦多大学)的教科书,包括拉普拉斯变换、波特图、奈奎斯特图
参考
https://www.coursera.org/learn/intro-self-driving-cars/lecture/QMOMH/lesson-1-proportional-integral-derivative-pid-control
以上是关于自动驾驶 5-1 Lesson 1: Proportional-Integral-Derivative (PID) Control的主要内容,如果未能解决你的问题,请参考以下文章