自动驾驶 5-2 Lesson 2: Longitudinal Speed Control with PID
Posted 架构师易筋
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了自动驾驶 5-2 Lesson 2: Longitudinal Speed Control with PID相关的知识,希望对你有一定的参考价值。
gear: 齿轮
throttle:减速, 节流阀
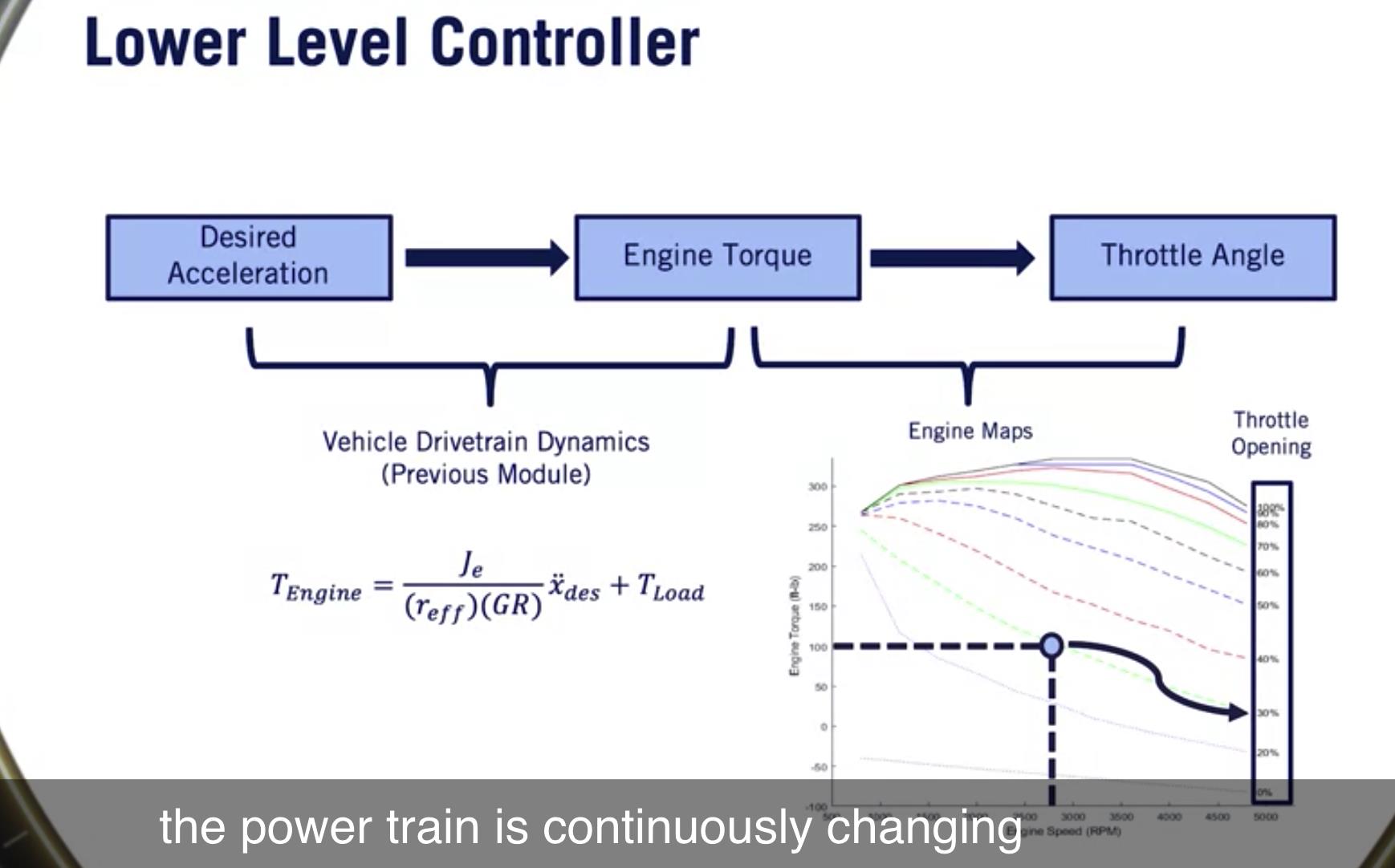
torque:转矩
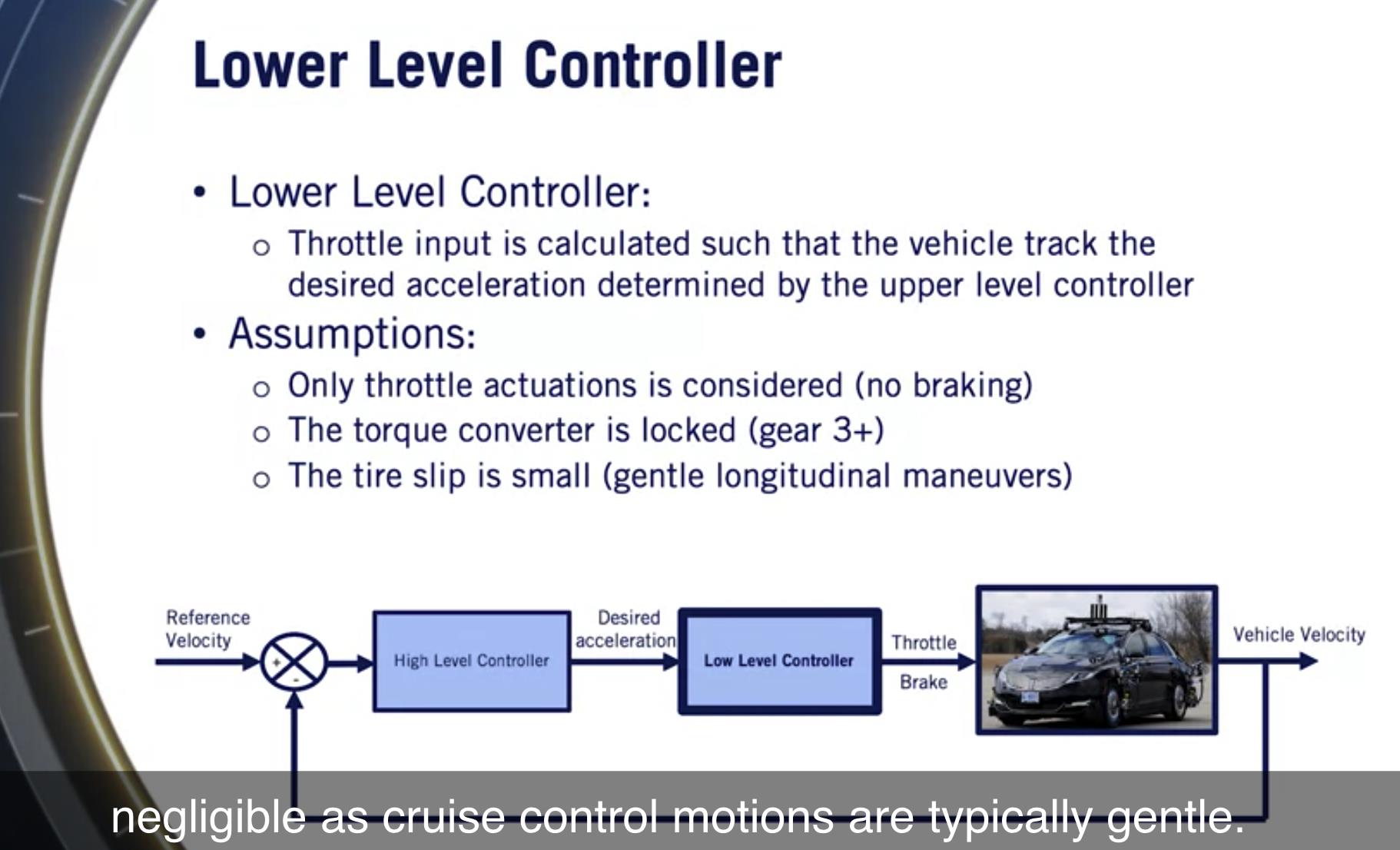
gentle longitudinal maneuvers:细致巧妙的移动
第 2 课补充阅读:使用 PID 的纵向速度控制
补充阅读:带PID的纵向速度控制
要更深入地了解纵向控制,请阅读以下教科书中的第 5 章(第 123-150 页):
R. Rajamani,“纵向控制简介”,载于:车辆动力学和控制,机械工程系列,https://www.springer.com/cda/content/document/cda_downloaddocument/9781461414322-c1.pdf?SGWID=0-0-45-1265143-p174267791(2006)。
参考
https://www.coursera.org/learn/intro-self-driving-cars/lecture/6qs1g/lesson-2-longitudinal-speed-control-with-pid
以上是关于自动驾驶 5-2 Lesson 2: Longitudinal Speed Control with PID的主要内容,如果未能解决你的问题,请参考以下文章
自动驾驶 2-2 Lesson 2: Hardware Configuration Design
自动驾驶1-5: Lesson 2: Requirements for Perception
自动驾驶 2-1 Lesson 1: Sensors and Computing Hardware
自动驾驶 2-3 Lesson 3: Software Architecture
自动驾驶 4-2 Lesson 2: The Kinematic Bicycle Model
自动驾驶 6-2: 几何横向控制Lesson 2: Geometric Lateral Control - Pure Pursuit