玫瑰线轨迹如何规划?(desmos+ROS2+turtlesim+……)
Posted zhangrelay
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了玫瑰线轨迹如何规划?(desmos+ROS2+turtlesim+……)相关的知识,希望对你有一定的参考价值。
这篇博客是之前魔幻步伐的补充(有学生已经做出了,自然要补充更难的内容):
ROS2趣味题库之turtlesim魔幻步伐(轨迹类题型)_zhangrelay的专栏-CSDN博客
轨迹是机器人运动的重要内容。
为什么选这个图形???我喜欢甜甜圈!!!

有点像吧,用C++写一个简单的动态甜甜圈吧字符串显示的那种哦_zhangrelay的专栏-CSDN博客
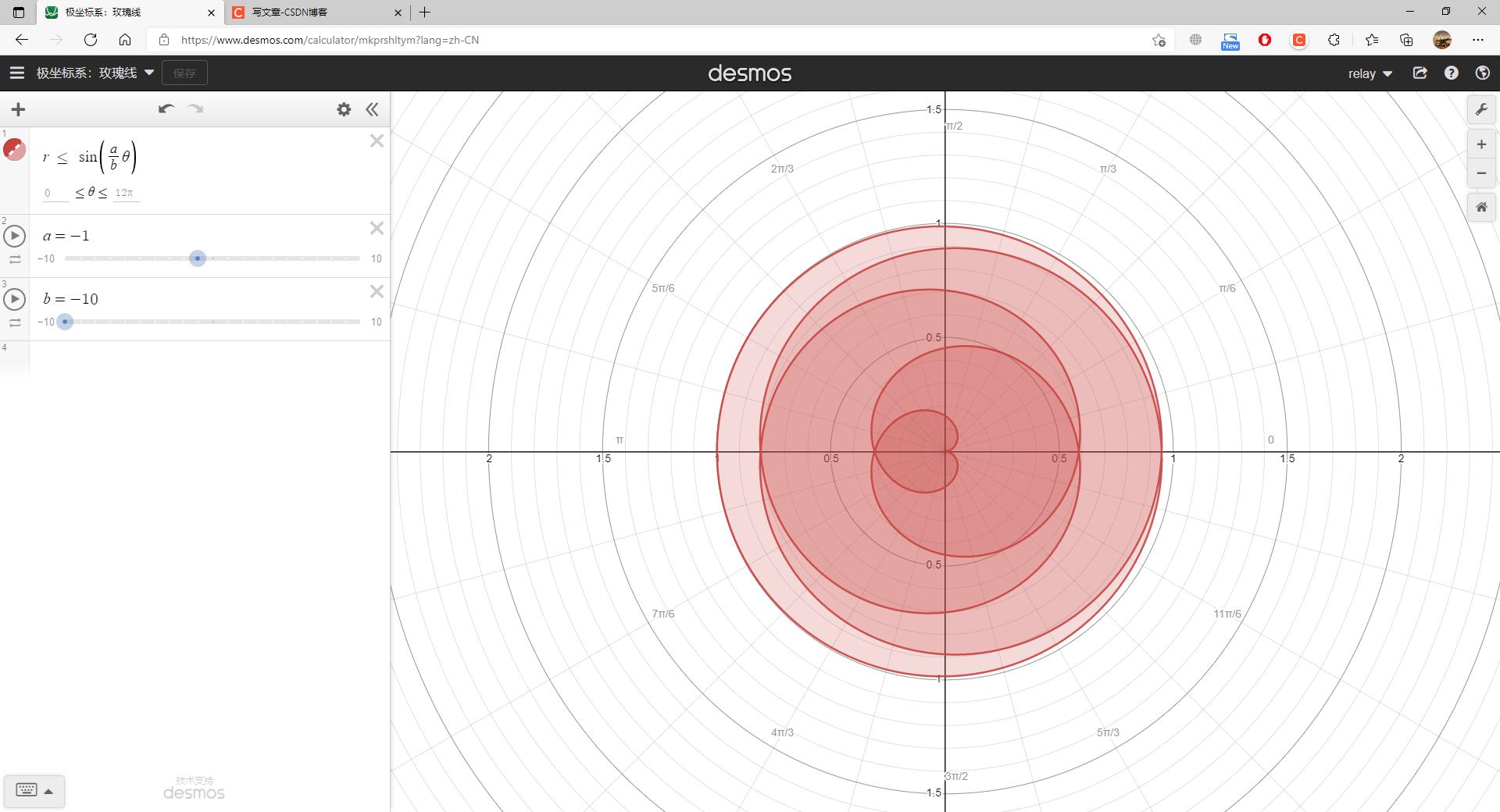
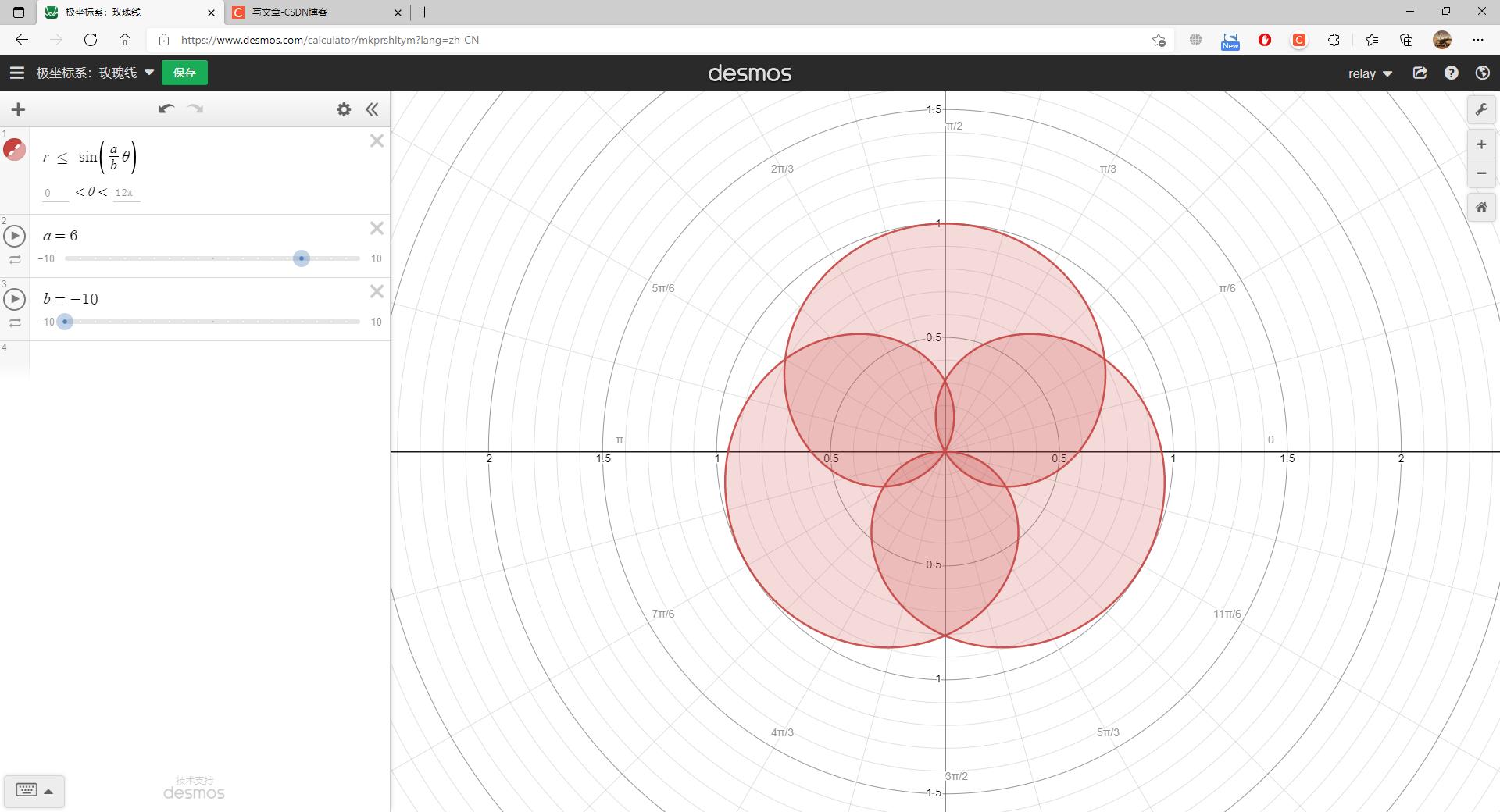
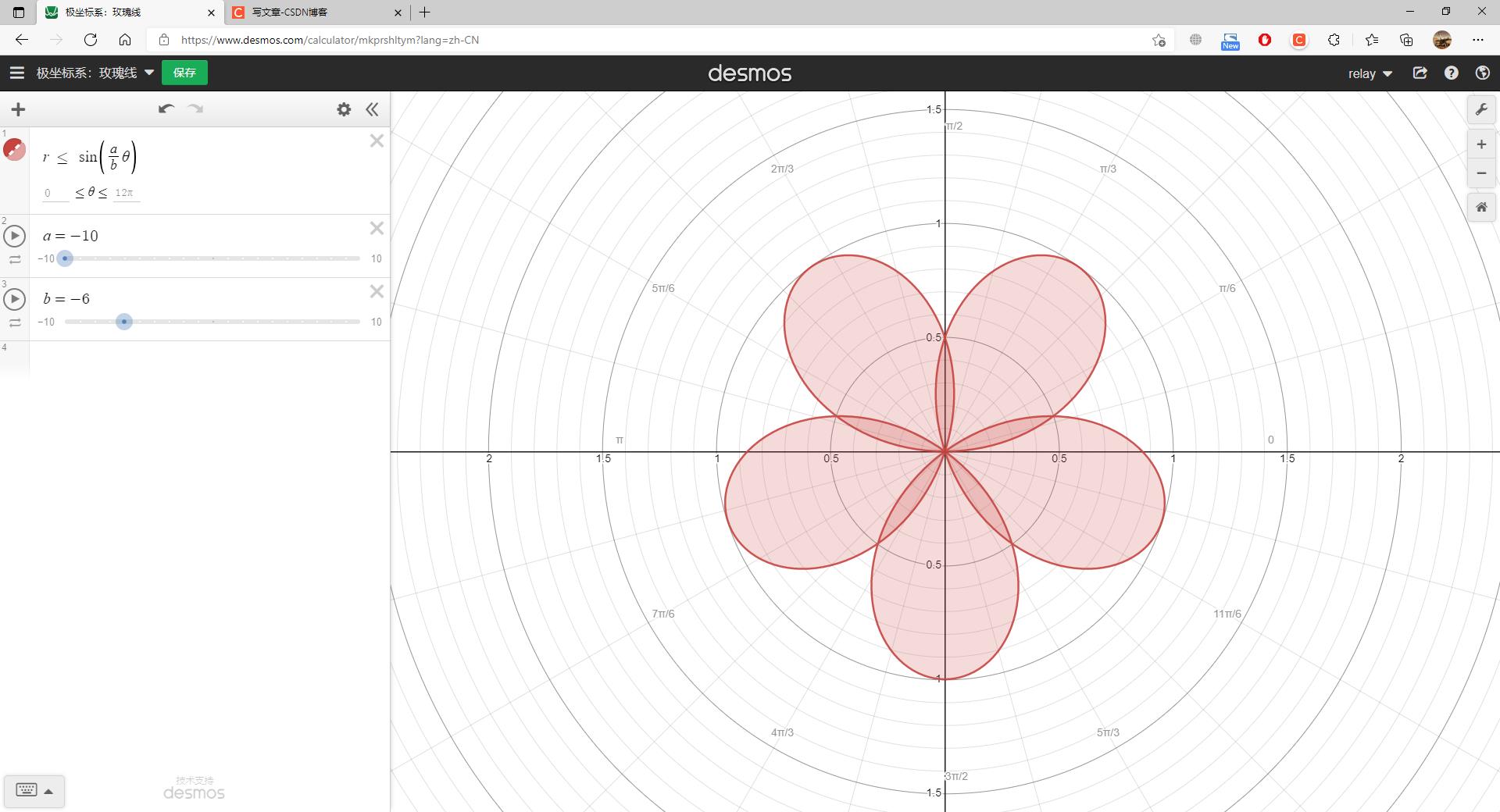
推荐用desmos看一看,选择一款最爱的曲线,然后控制机器人的线速度和角速度进行控制,画出优美的轨迹。
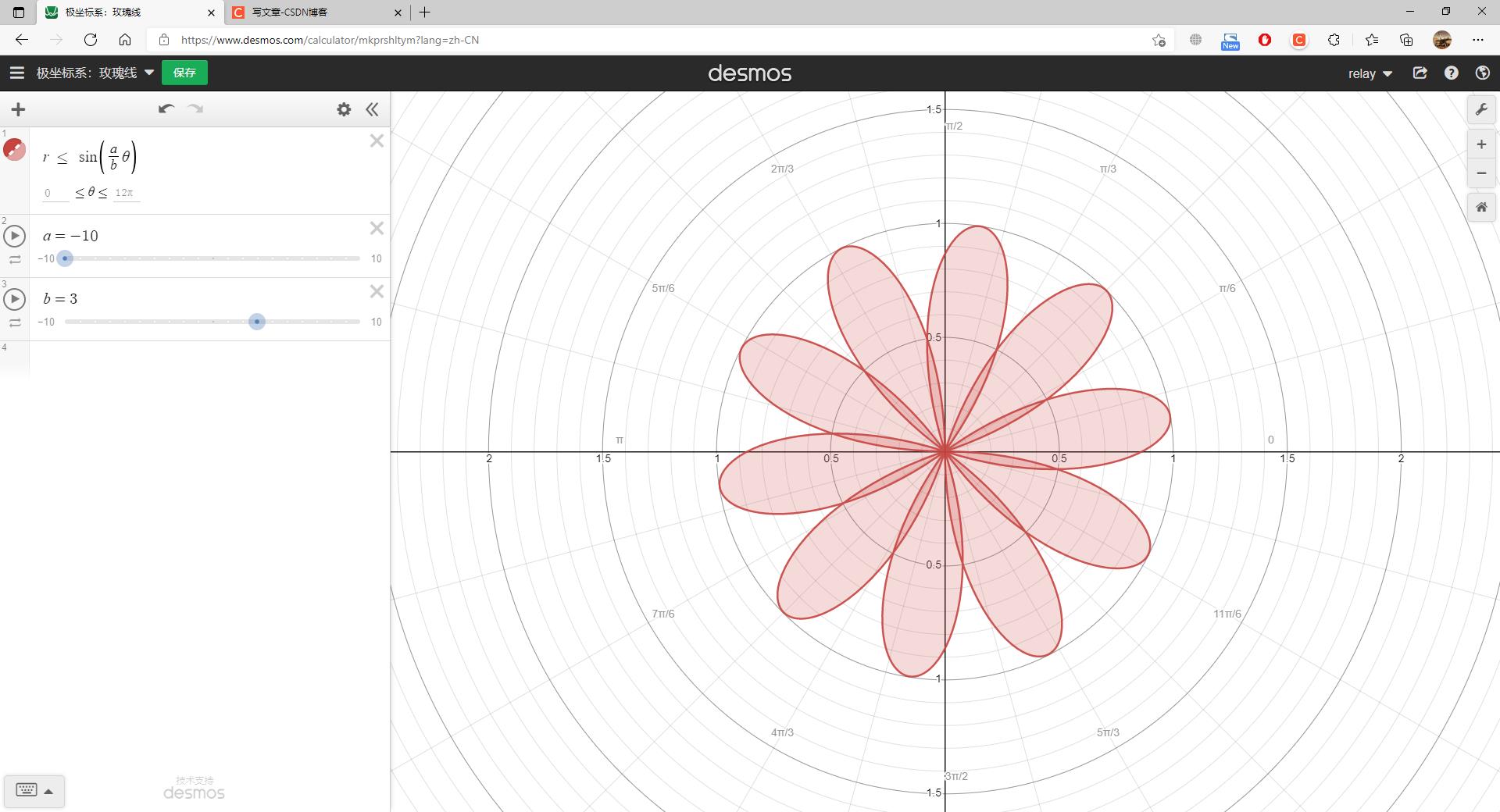
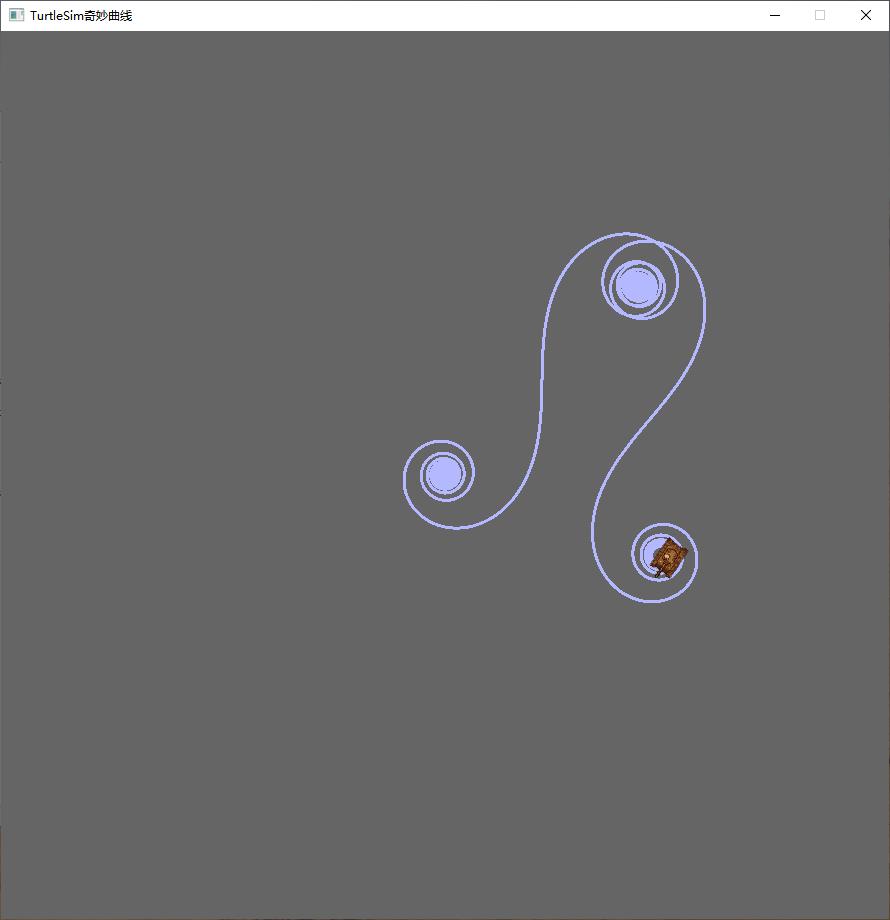
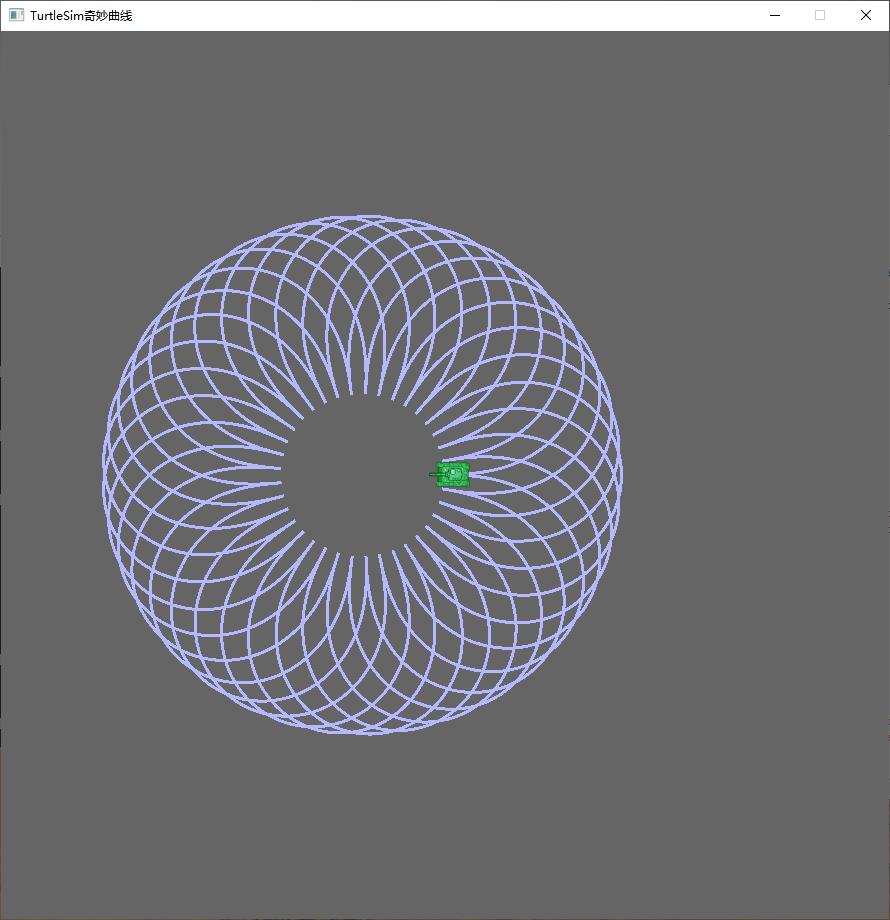
然后自己敲代码写入公式,一画懵圈啦,效果是这样的?

美不美呢?也还不错,但是和需求也差太远了……
笛卡尔与极坐标……

公式就不列了,各种曲线都能绘制出来,这是开环曲线绘制,当然还必须有闭环曲线绘制,也可以称为轨迹跟踪,这个演示是运动学的,后续动力学案例也会加入^_^
只要坚持,就有希望,这希望如下:
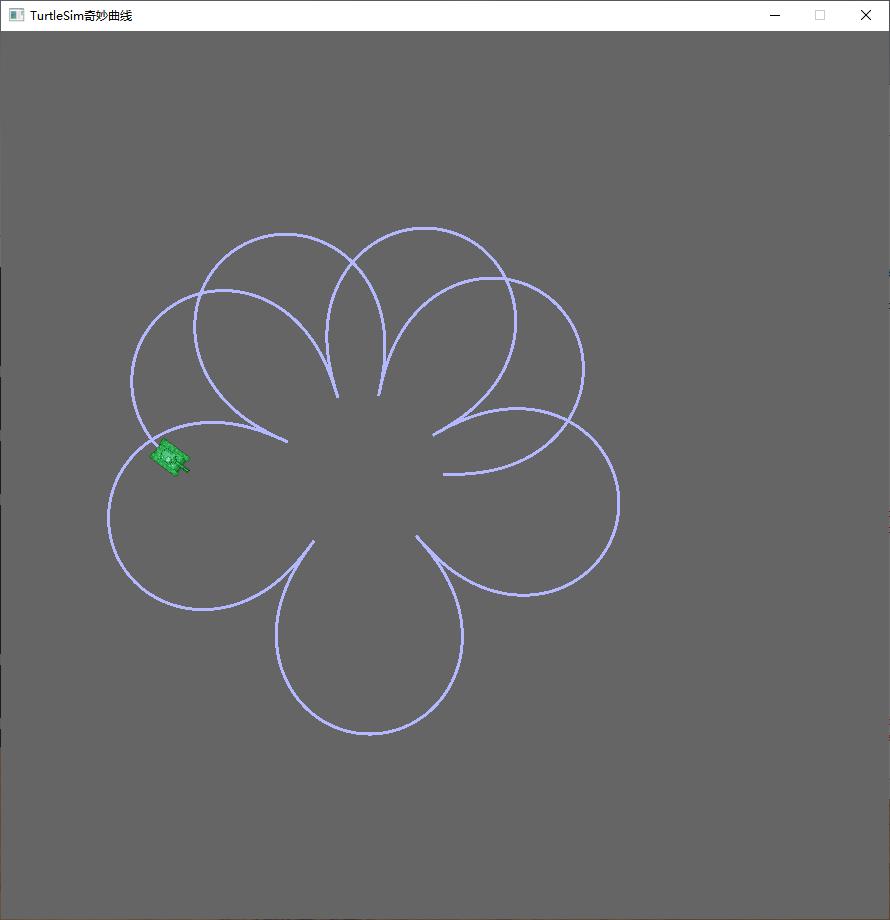
耐心等待后,欢欢喜喜看到如下美图::^_^
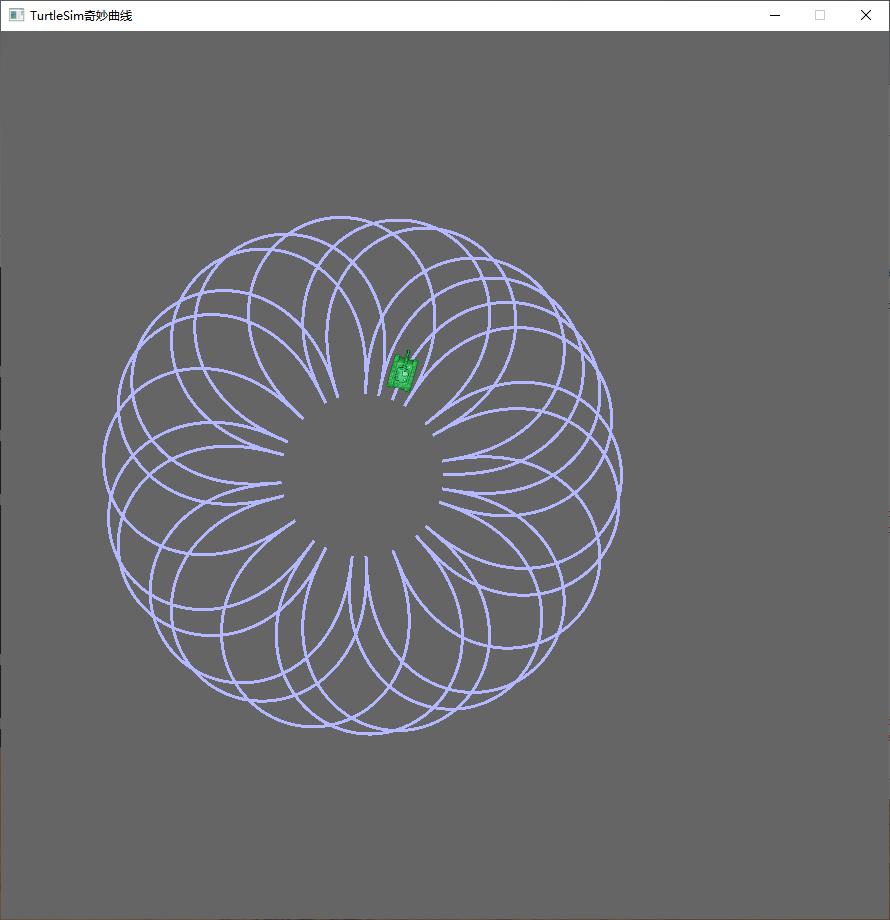
继续耐心等待……
以上是关于玫瑰线轨迹如何规划?(desmos+ROS2+turtlesim+……)的主要内容,如果未能解决你的问题,请参考以下文章
plotjuggler⬅ROS1/ROS2画轨迹神器➡rqt_plot+rqt_multiplot之超级加强版