差动驱动机器人轨迹-CoCube
Posted zhangrelay
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了差动驱动机器人轨迹-CoCube相关的知识,希望对你有一定的参考价值。
轨迹博客:
玫瑰线轨迹如何规划?(desmos+ROS2+turtlesim+……)
如上所涉及的机器人假定模型都是差动驱动机器人。
许多移动机器人使用一种称为差动驱动的驱动机构。它由安装在公共轴上的两个驱动轮组成,每个轮可以独立地向前或向后驱动。
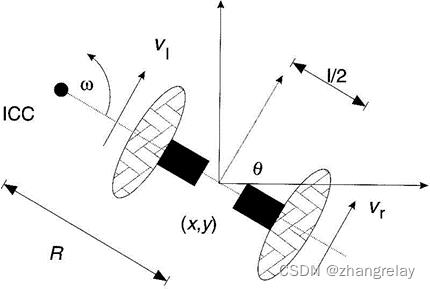
图1:差动驱动运动学-Dudek和Jenkin《移动机器人的计算原理》
机器人旋转的点被称为ICC -瞬时曲率中心
通过改变两个轮子的速度,可以改变机器人的轨迹。
这类驱动器有三个有趣的例子:
- 直线运动,左右轮速度一样
- 绕轮轴的中点旋转,也就是原地旋转,左右轮速度大小一样,方向相反。
- 绕某一轮为中心旋转,左轮或右轮只有一轮有速度
注意,差动驱动机器人不能沿着轴的方向移动——这是一个奇点。
曲线上存在不可导、不连续、根本没有定义的点,这些点就叫做奇点。基本上来说求导就可以瑕点是函数趋于无穷的点;奇点是函数未定的点。比如间断点,无定义点。奇点包含瑕点。
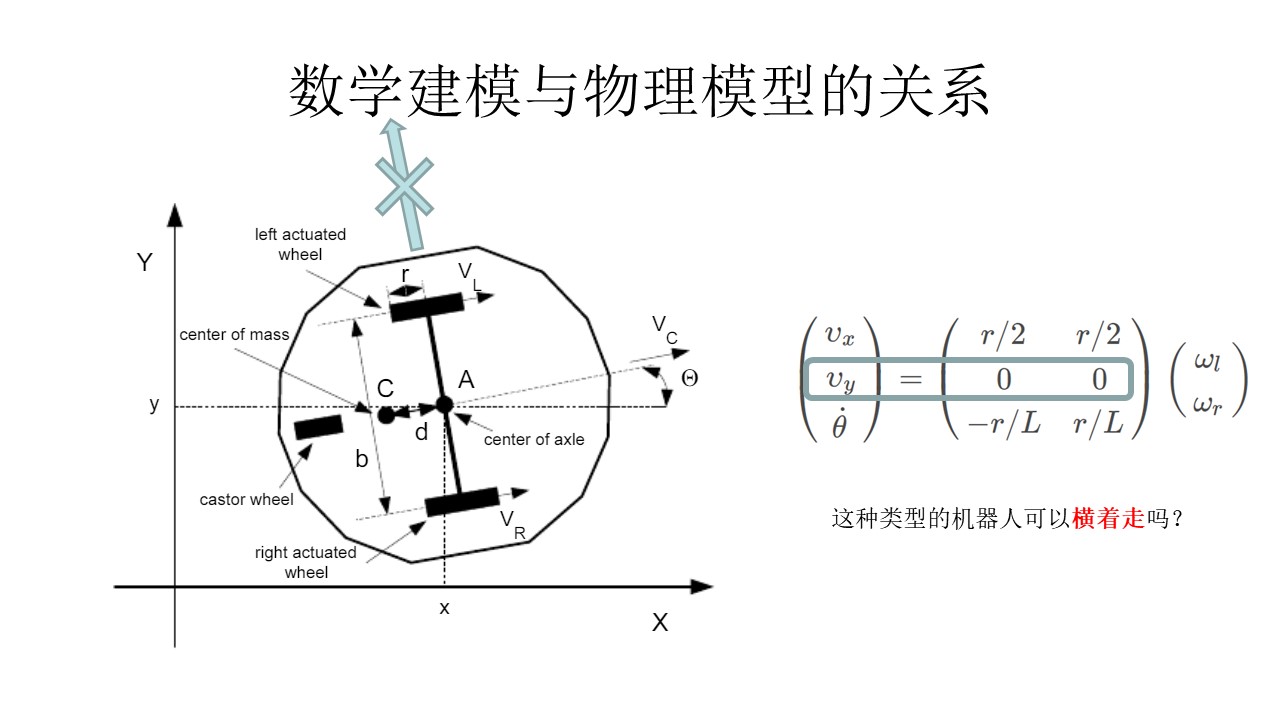
图2 差动机器人数学建模
差速驱动车辆对每个车轮速度的微小变化非常敏感。轮子之间相对速度的差异会影响机器人的轨迹。它们对地平面的微小变化也非常敏感,可能需要额外的轮子(脚轮)来支撑。
凹凸不平的地面会影响轨迹精度。
差动驱动机器人的正向运动学
在图1中,假设机器人在某个位置(x,y),朝向与X轴成θ角的方向。假设机器人的中心位于轮轴的中点。通过操纵控制参数Vl、Vr,可以使机器人移动到不同的位置和方向。(注:Vl,Vr)为车轮沿地面的速度)。

图3:差动机器人的正向运动学
移动机器人的逆运动学
如何控制机器人达到给定的位置(x,y,θ)——这就是所谓的逆运动学问题。
不幸的是,差动驱动机器人在建立其位置时符合所谓的非完整约束。例如,机器人不能沿着它的轴横向移动。类似的非完整约束是汽车只能转动前轮。它不能直接侧向移动,因为平行泊车(侧方位停车)需要更复杂的转向操作。因此,不能简单地指定一个任意的机器人姿态(x,y,θ)并找到控制机器人所需要的速度。
这激活了机器人沿直线移动,然后原地旋转一圈,然后再次直线移动的策略,作为差动驱动机器人的导航策略。
直线运动轨迹:

圆周运动轨迹:
未闭合
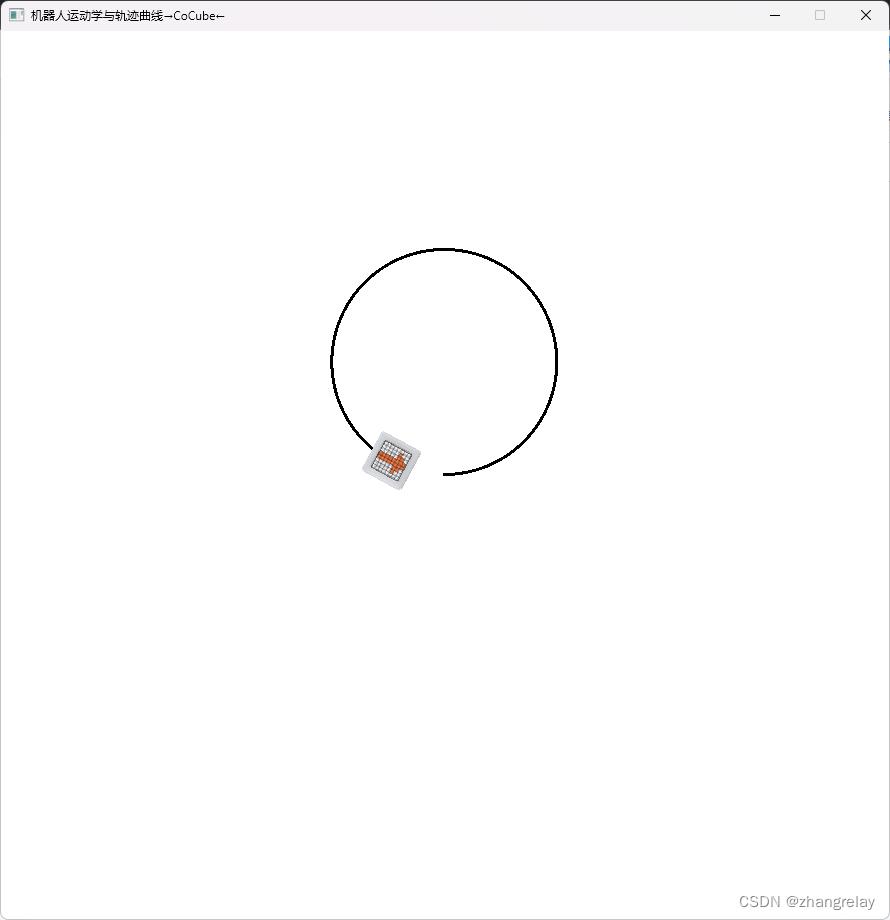
闭合后,但控制为开环,也就是没有反馈控制。

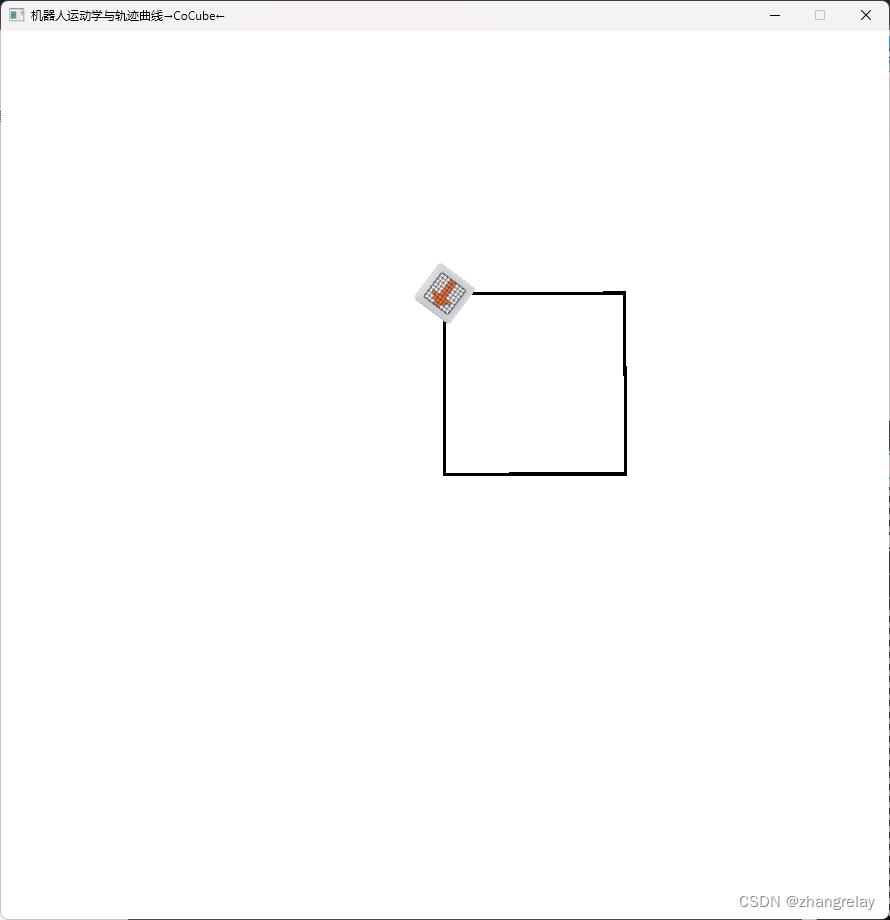
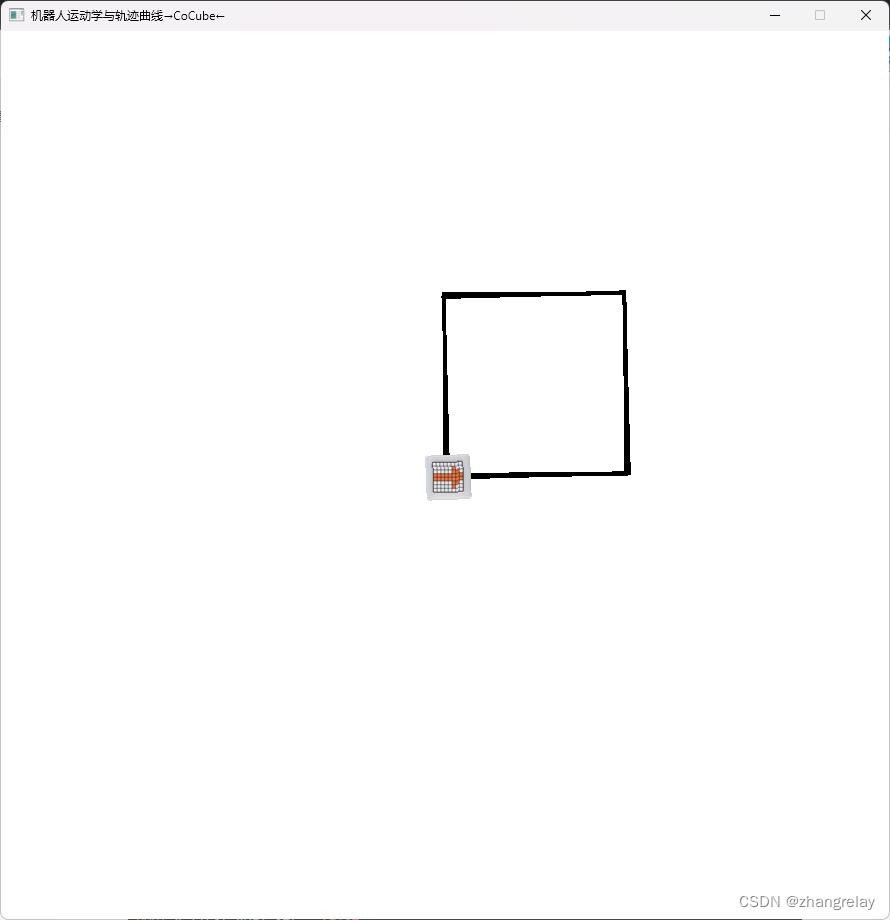
正方形运动轨迹(非连续控制):
可参考官方示例代码:
#include <rclcpp/rclcpp.hpp>
#include <turtlesim/msg/pose.hpp>
#include <geometry_msgs/msg/twist.hpp>
#include <std_srvs/srv/empty.hpp>
#include <math.h>
turtlesim::msg::Pose::SharedPtr g_pose;
turtlesim::msg::Pose g_goal;
enum State
FORWARD,
STOP_FORWARD,
TURN,
STOP_TURN,
;
State g_state = FORWARD;
State g_last_state = FORWARD;
bool g_first_goal_set = false;
#define PI 3.141592
void poseCallback(const turtlesim::msg::Pose::SharedPtr pose)
g_pose = pose;
bool hasReachedGoal()
return fabsf(g_pose->x - g_goal.x) < 0.01 && fabsf(g_pose->y - g_goal.y) < 0.01 && fabsf(g_pose->theta - g_goal.theta) < 0.002;
bool hasStopped()
return g_pose->angular_velocity < 0.0001 && g_pose->linear_velocity < 0.0001;
void printGoal()
RCLCPP_INFO(rclcpp::get_logger("draw_square"), "New goal [%f %f, %f]", g_goal.x, g_goal.y, g_goal.theta);
void commandTurtle(rclcpp::Publisher<geometry_msgs::msg::Twist>::SharedPtr twist_pub, float linear, float angular)
geometry_msgs::msg::Twist twist;
twist.linear.x = linear;
twist.angular.z = angular;
twist_pub->publish(twist);
void stopForward(rclcpp::Publisher<geometry_msgs::msg::Twist>::SharedPtr twist_pub)
if (hasStopped())
RCLCPP_INFO(rclcpp::get_logger("draw_square"), "Reached goal");
g_state = TURN;
g_goal.x = g_pose->x;
g_goal.y = g_pose->y;
g_goal.theta = fmod(g_pose->theta + static_cast<float>(PI) / 2.0f, 2.0f * static_cast<float>(PI));
// wrap g_goal.theta to [-pi, pi)
if (g_goal.theta >= static_cast<float>(PI)) g_goal.theta -= 2.0f * static_cast<float>(PI);
printGoal();
else
commandTurtle(twist_pub, 0, 0);
void stopTurn(rclcpp::Publisher<geometry_msgs::msg::Twist>::SharedPtr twist_pub)
if (hasStopped())
RCLCPP_INFO(rclcpp::get_logger("draw_square"), "Reached goal");
g_state = FORWARD;
g_goal.x = cos(g_pose->theta) * 4 + g_pose->x;
g_goal.y = sin(g_pose->theta) * 4 + g_pose->y;
g_goal.theta = g_pose->theta;
printGoal();
else
commandTurtle(twist_pub, 0, 0);
void forward(rclcpp::Publisher<geometry_msgs::msg::Twist>::SharedPtr twist_pub)
if (hasReachedGoal())
g_state = STOP_FORWARD;
commandTurtle(twist_pub, 0, 0);
else
commandTurtle(twist_pub, 1.0f, 0);
void turn(rclcpp::Publisher<geometry_msgs::msg::Twist>::SharedPtr twist_pub)
if (hasReachedGoal())
g_state = STOP_TURN;
commandTurtle(twist_pub, 0, 0);
else
commandTurtle(twist_pub, 0, 0.1f);
void timerCallback(rclcpp::Publisher<geometry_msgs::msg::Twist>::SharedPtr twist_pub)
if (!g_pose)
return;
if (!g_first_goal_set)
g_first_goal_set = true;
g_state = FORWARD;
g_goal.x = cos(g_pose->theta) * 4 + g_pose->x;
g_goal.y = sin(g_pose->theta) * 4 + g_pose->y;
g_goal.theta = g_pose->theta;
printGoal();
if (g_state == FORWARD)
forward(twist_pub);
else if (g_state == STOP_FORWARD)
stopForward(twist_pub);
else if (g_state == TURN)
turn(twist_pub);
else if (g_state == STOP_TURN)
stopTurn(twist_pub);
int main(int argc, char** argv)
rclcpp::init(argc, argv);
auto nh = rclcpp::Node::make_shared("draw_square");
auto pose_sub = nh->create_subscription<turtlesim::msg::Pose>("turtle1/pose", 1, std::bind(poseCallback, std::placeholders::_1));
auto twist_pub = nh->create_publisher<geometry_msgs::msg::Twist>("turtle1/cmd_vel", 1);
auto reset = nh->create_client<std_srvs::srv::Empty>("reset");
auto timer = nh->create_wall_timer(std::chrono::milliseconds(16), [twist_pub]()timerCallback(twist_pub););
auto empty = std::make_shared<std_srvs::srv::Empty::Request>();
reset->async_send_request(empty);
rclcpp::spin(nh);
开环控制,重复精度不高,效果如下:
思考题:
如何绘制如下曲线,选择一款绘制即可。
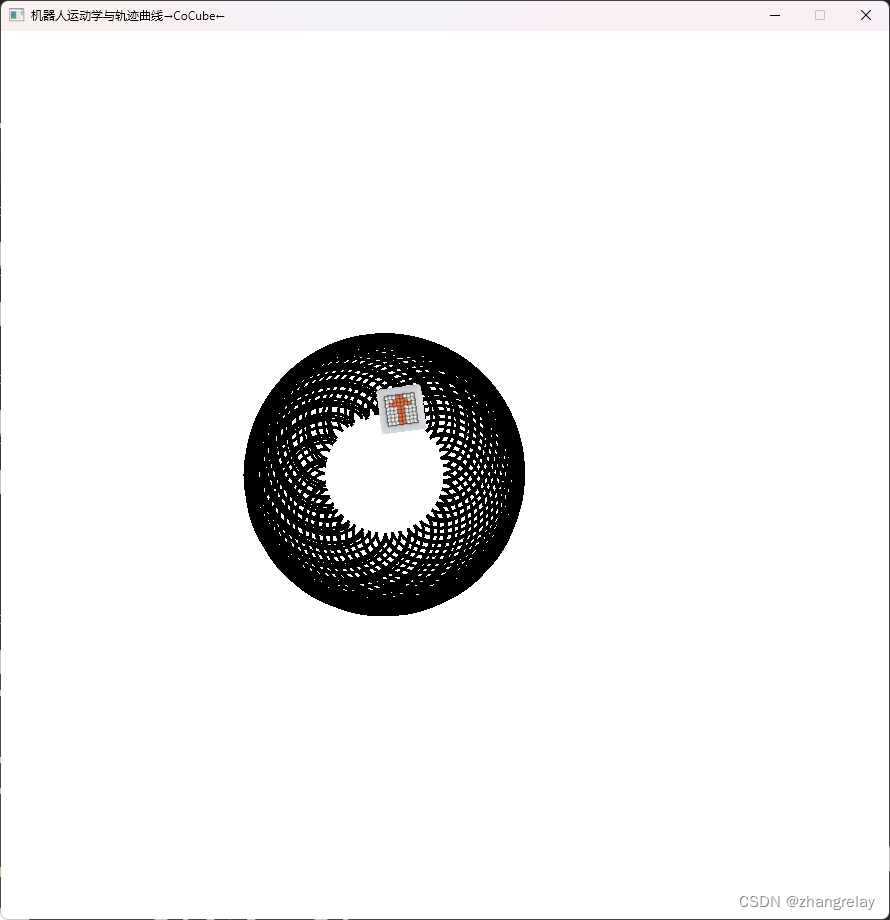
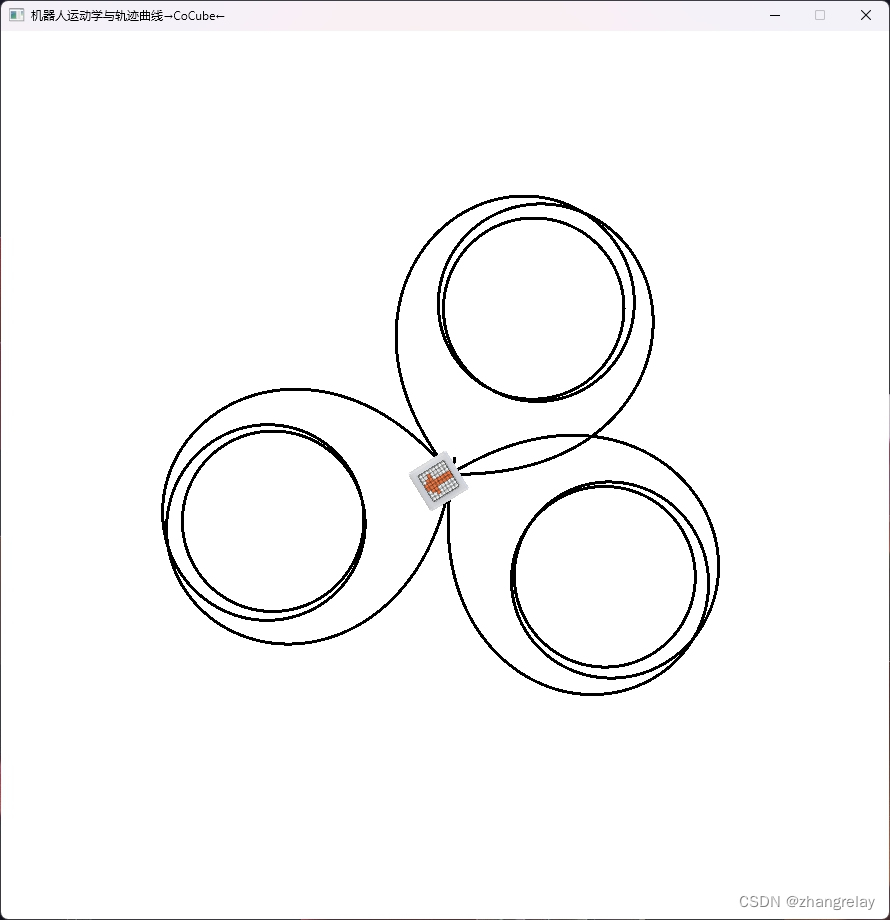
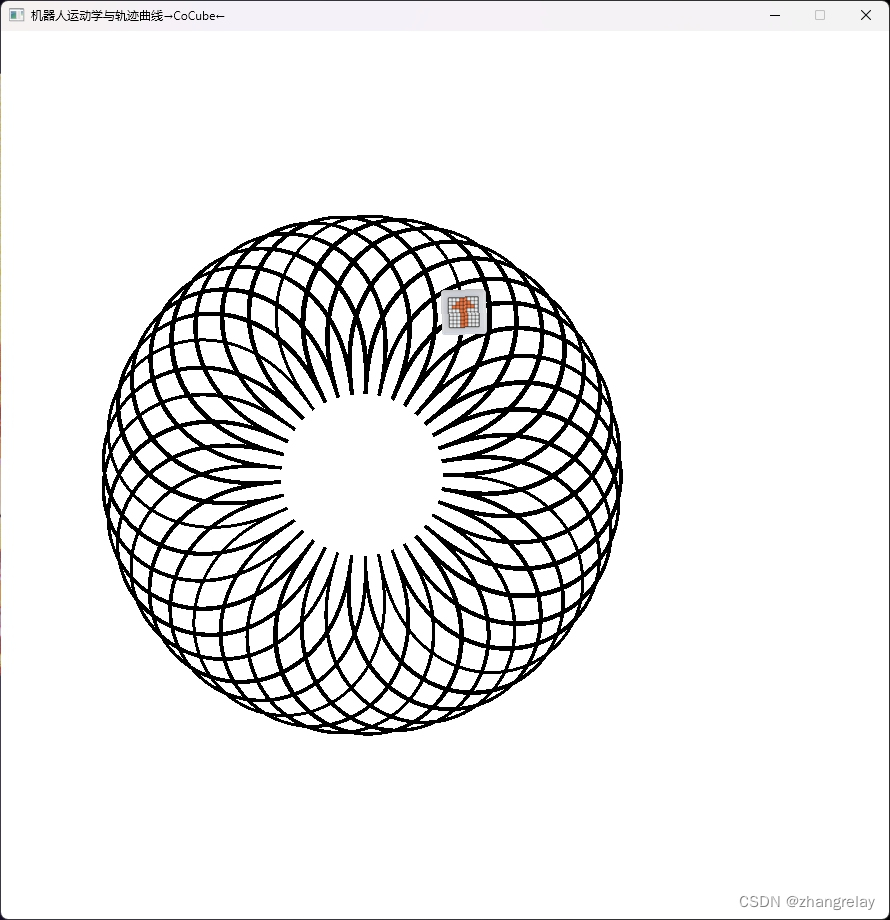
-Fin-
以上是关于差动驱动机器人轨迹-CoCube的主要内容,如果未能解决你的问题,请参考以下文章