自由运动和环境限制-CoCube
Posted zhangrelay
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了自由运动和环境限制-CoCube相关的知识,希望对你有一定的参考价值。
之前,两篇:
001:差动驱动机器人轨迹-CoCube
002:迷宫逃离的问题-CoCube
分别代表了两种环境下,机器人路径规划的特性。
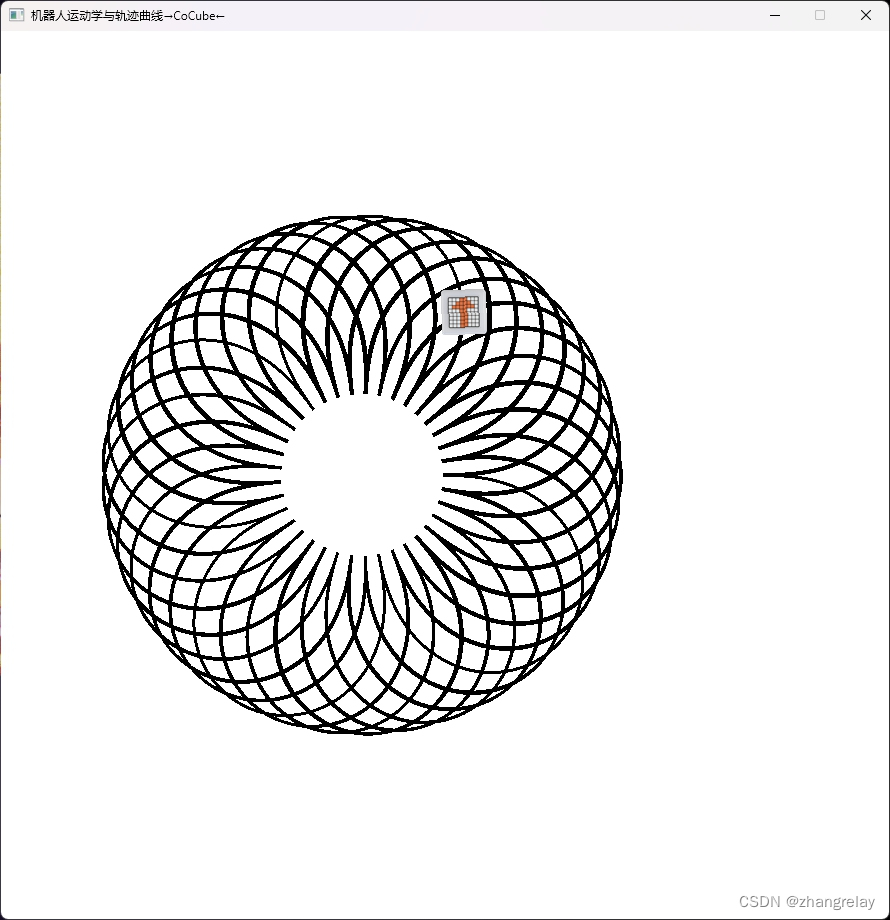
001:无拘无束的自由空间
如果给定一定的机器人左右轮控制量,机器人可以走出需要的开环曲线。
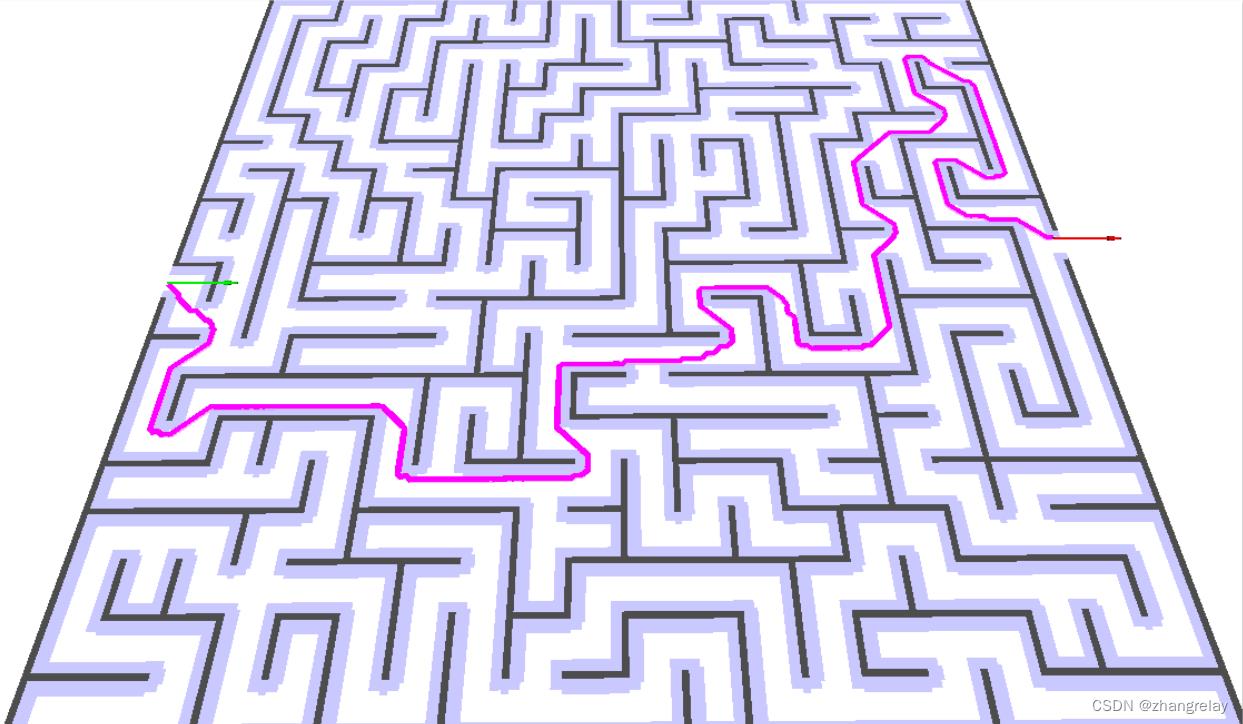
002:迷宫其实是一种外部环境限制条件下的运动规划,如果仅仅考虑躲避障碍物,那么只需要局部路径规划,但是如果需要考虑类似起点和终点的导航,则还需要全局路径规划,最好还要有一个相对准确的地图,否则容易迷路。
可以简单看一种情况:

这种情况比较简单,只需要穿过中间通道,就可以到达上部分区域。

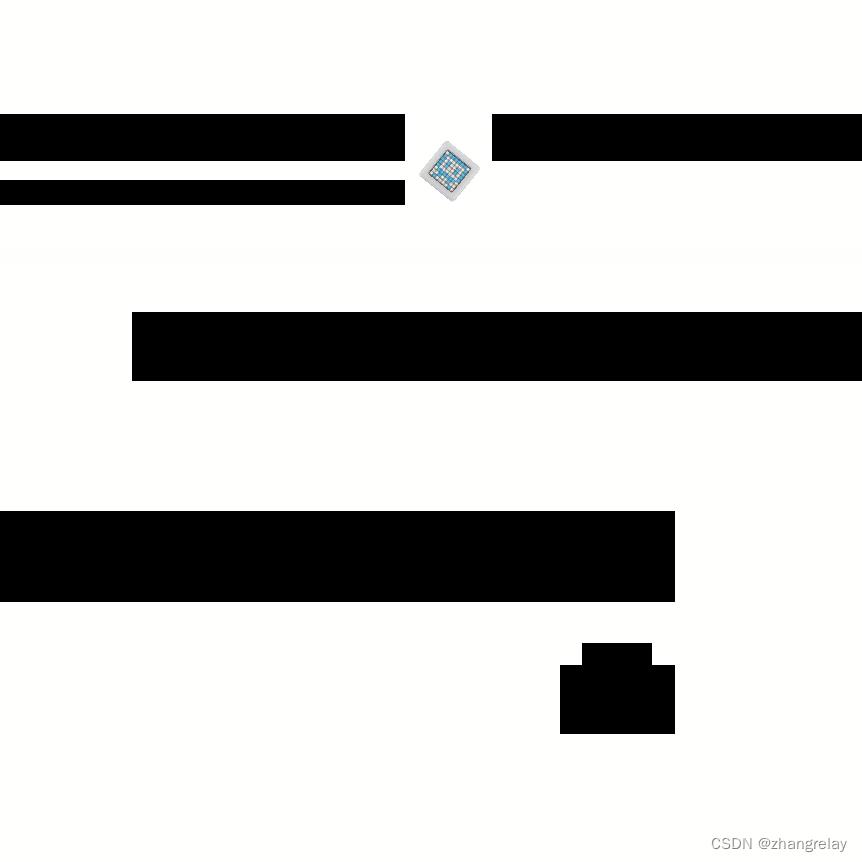
规划效果如下:
从上部分穿过到下面部分也是类似的。
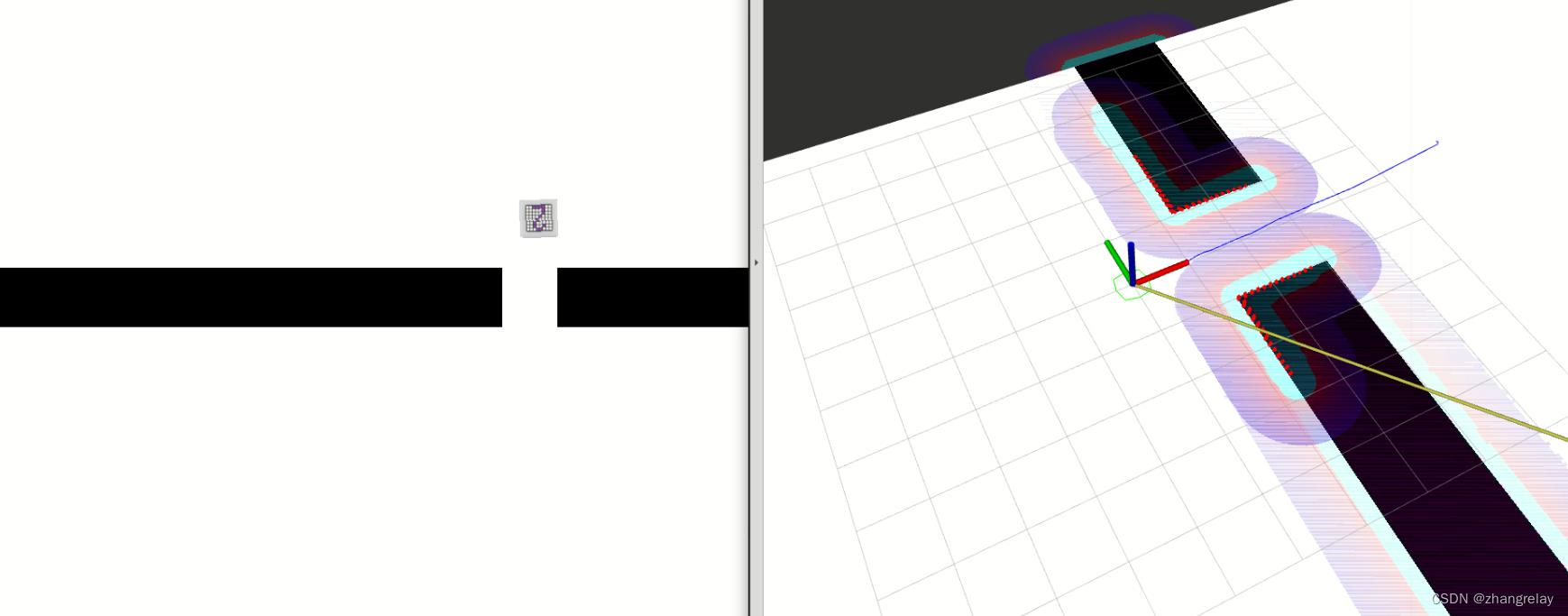
通道还是比较窄的。

稍微复杂一些情况如下:
这些都可以用同一类方式得到解决。
对于求解这一类问题的复杂度是相似的,只不过通常而言地图越复杂需要的计算量越大
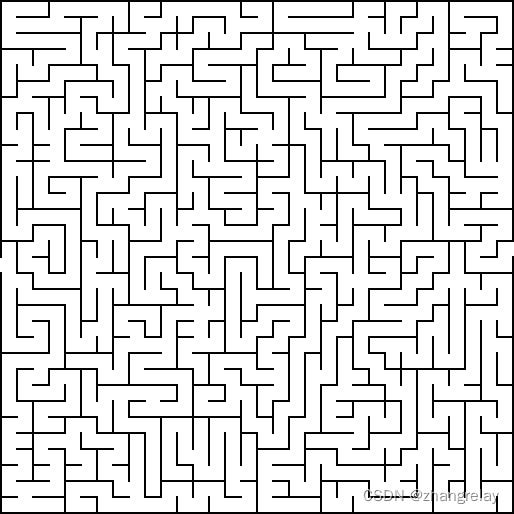
这一类迷宫地图,也可以很快得到路径。
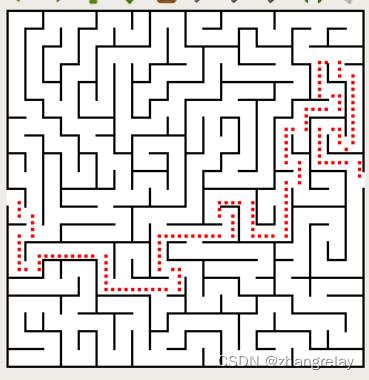
从上图到下图:
于是,会发现,从:
到:
循序渐进的学习和研究是非常重要的。
它们之间只隔着一层思维上的屏障,突破就能完全掌握其应用的。
简单小结一下:
无障碍物空间,机器人自由运动,控制输入直接反映到空间位置和姿态的变化。
有障碍物空间,机器人运动受到环境约束,触碰到障碍物的输入都是无效的,需要在算法上进行判定,避免这种情况的出现,这是开环控制无法解决的问题啦。
怎么办?
需要闭环发力^_^
以上是关于自由运动和环境限制-CoCube的主要内容,如果未能解决你的问题,请参考以下文章