plotjuggler⬅ROS1/ROS2画轨迹神器➡rqt_plot+rqt_multiplot之超级加强版
Posted zhangrelay
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了plotjuggler⬅ROS1/ROS2画轨迹神器➡rqt_plot+rqt_multiplot之超级加强版相关的知识,希望对你有一定的参考价值。
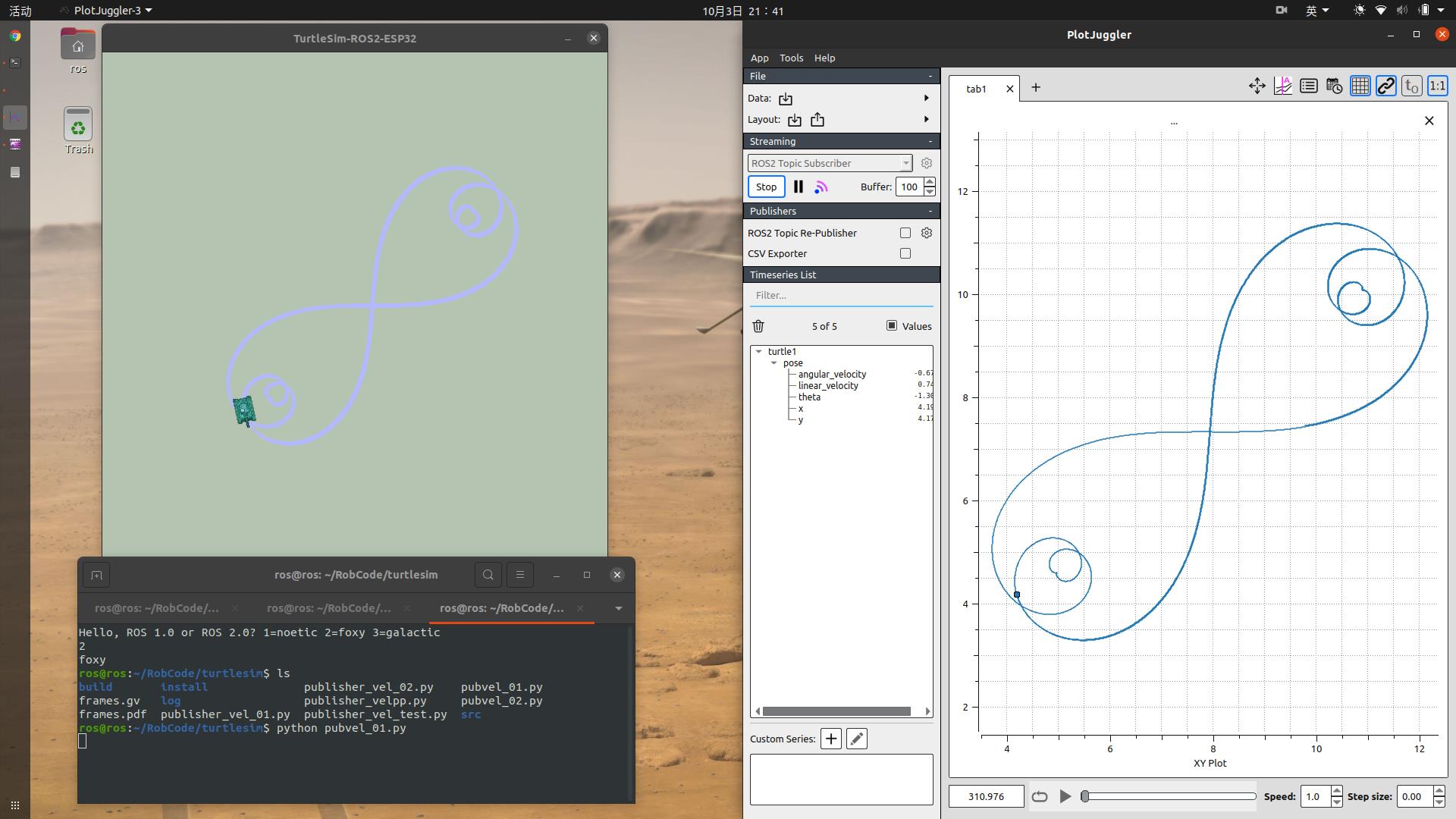
先看效果(turtlesim):
再看 (mobot):
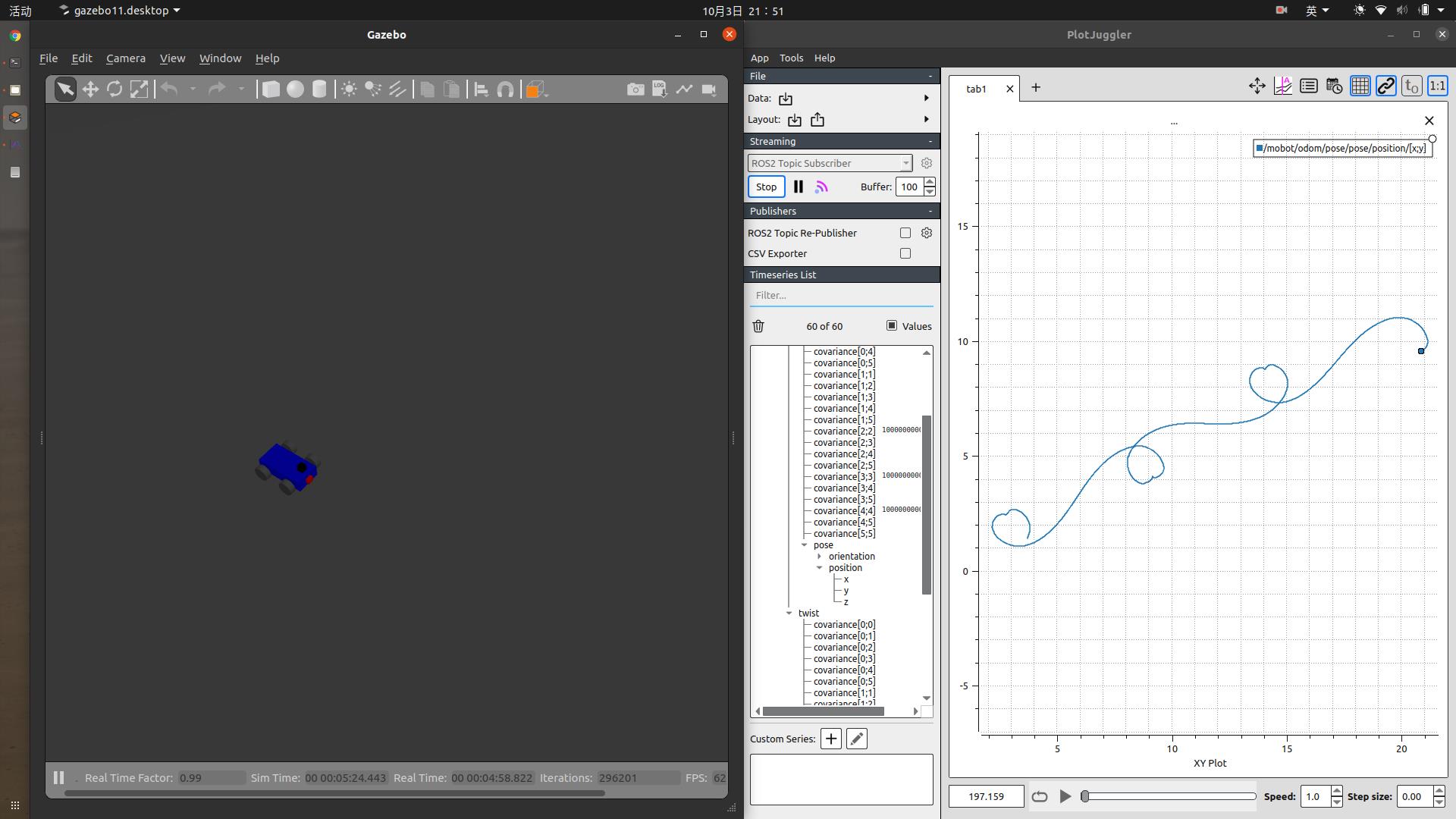
很显然,同样的开环控制指令(速度指令),画出了不同轨迹。心❤形状也有差异。
如何构造相似的轨迹,应用于模型相似的机器人,后续给出闭环控制算法的效果。
安装:
- sudo apt install ros-xxx-plotjuggler
- sudo apt install ros-xxx-plotjuggler-ros
xxx--noetic,foxy,galactic均可。
以上是关于plotjuggler⬅ROS1/ROS2画轨迹神器➡rqt_plot+rqt_multiplot之超级加强版的主要内容,如果未能解决你的问题,请参考以下文章