机器人轨迹与运动学动力学的联系(ROS2+turtlesim+Gazebo)
Posted zhangrelay
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了机器人轨迹与运动学动力学的联系(ROS2+turtlesim+Gazebo)相关的知识,希望对你有一定的参考价值。
之前几篇博客,使用turtlesim画了一些轨迹有:
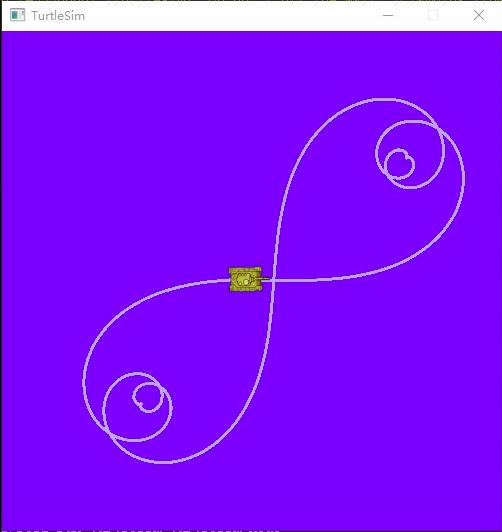
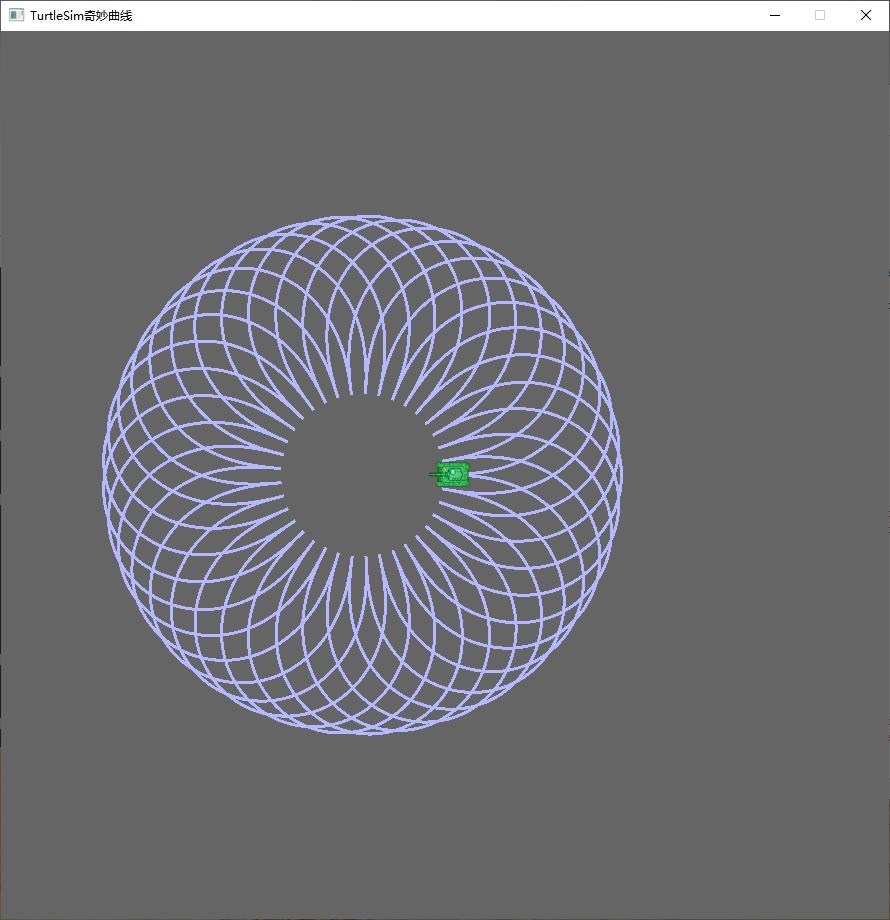
是很闲很无聊吗?其实不是这样的,这些轨迹都是开环控制线速度角速度画出来的,被控对象没有质量,没有加减速的过程,曲线很理想。换成Gazebo/Webots/CoppeliaSim中使用物理引擎的机器人就不会这样简单了,就需要轨迹跟踪算法了,采用闭环算法精确控制误差才可以的。
当然,运动学公式也是非常重要的。
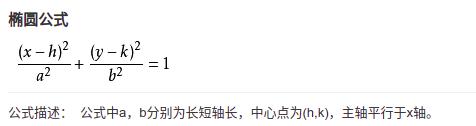
如何用此公式得到机器人进行椭圆运动需要的线速度和角速度公式呢?实现如下图的案例:

当控制对象为动力学模型时?
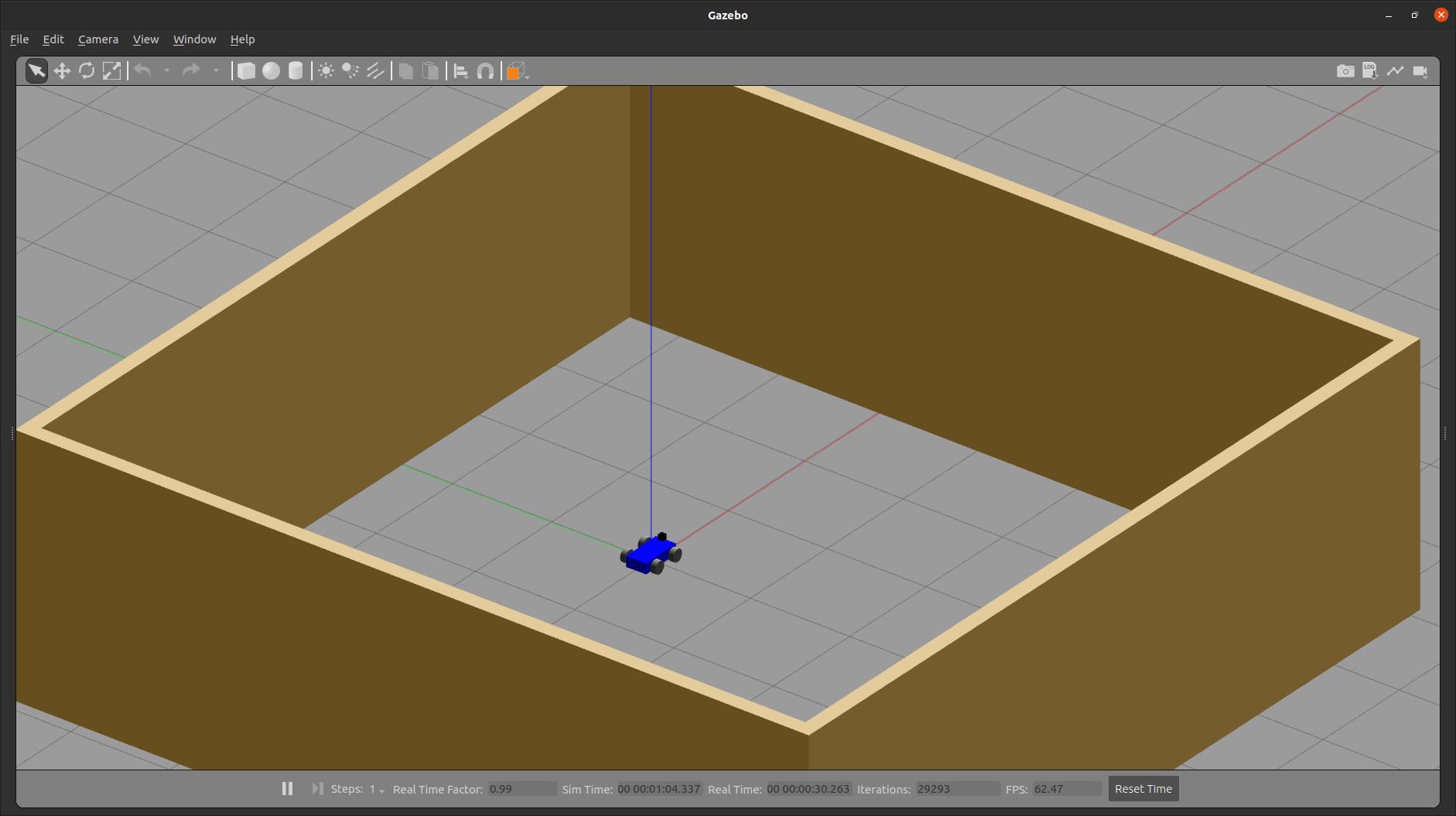 如何控制速度?尤其是启动停止时候的轨迹误差。
如何控制速度?尤其是启动停止时候的轨迹误差。
如果需要画出轨迹,可以使用plot工具,当然有更好用的PlotJuggler。
后续会逐步更新的。关于ROS2机器人的教程,参考链接如下:
ROS2机器人个人教程博客汇总(2021共6套)_zhangrelay的专栏-CSDN博客
以上是关于机器人轨迹与运动学动力学的联系(ROS2+turtlesim+Gazebo)的主要内容,如果未能解决你的问题,请参考以下文章