浅谈机器人控制与仿真设计----RDS和ROS
Posted zhangrelay
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了浅谈机器人控制与仿真设计----RDS和ROS相关的知识,希望对你有一定的参考价值。
机器人控制、仿真或实验,主要由三个部分组成,机器人、环境和算法。
当然各部分又包含很多子部分和功能,这里主要以仿真为主,为了使得仿真结果能够直接应用到实际机器人上,这里分别以RDS和ROS对比介绍。http://download.csdn.net/detail/zhangrelay/9629847
1 机器人
机器人的控制算法主要基于运动学或动力学设计,使机器人在环境中以期望速度或轨迹运动,当然要避障,这与环境相关,放在第二部分。机器人装备传感器感知环境,由算法做出决策,发送到运动执行机构,在加入学习能力之后,可以依据环境做出有利于自身的动态调整,以便于更好的适应环境和完成任务。
RDS:
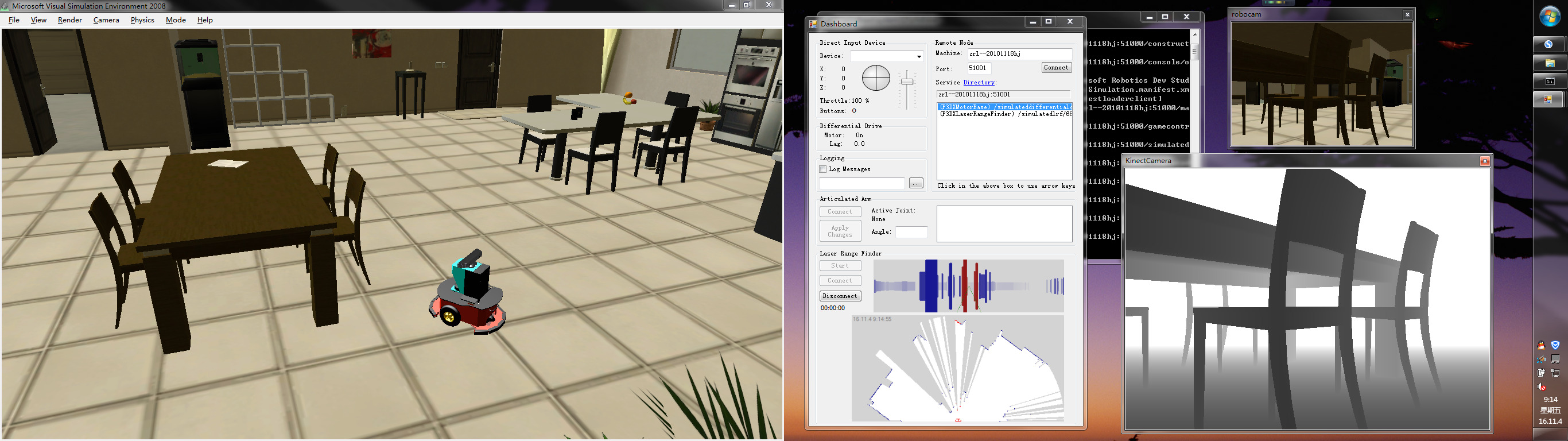
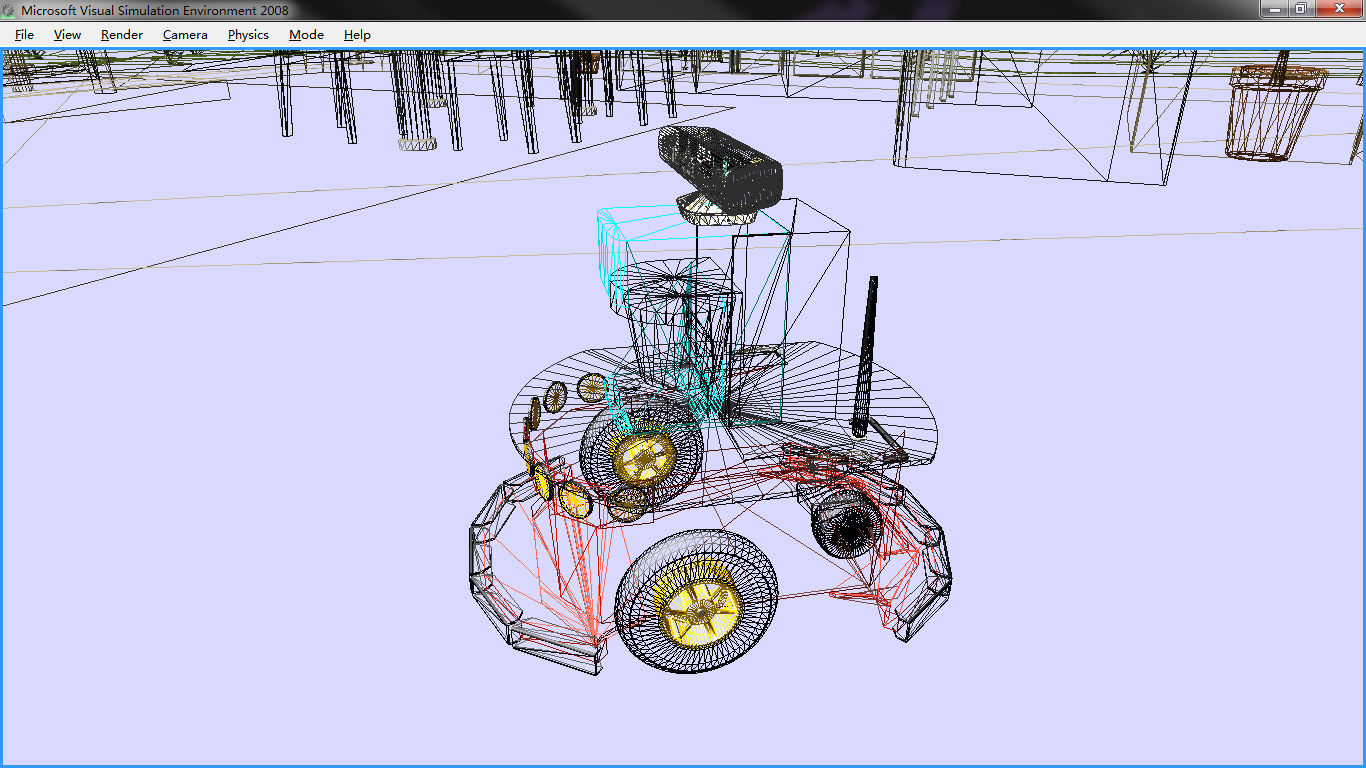
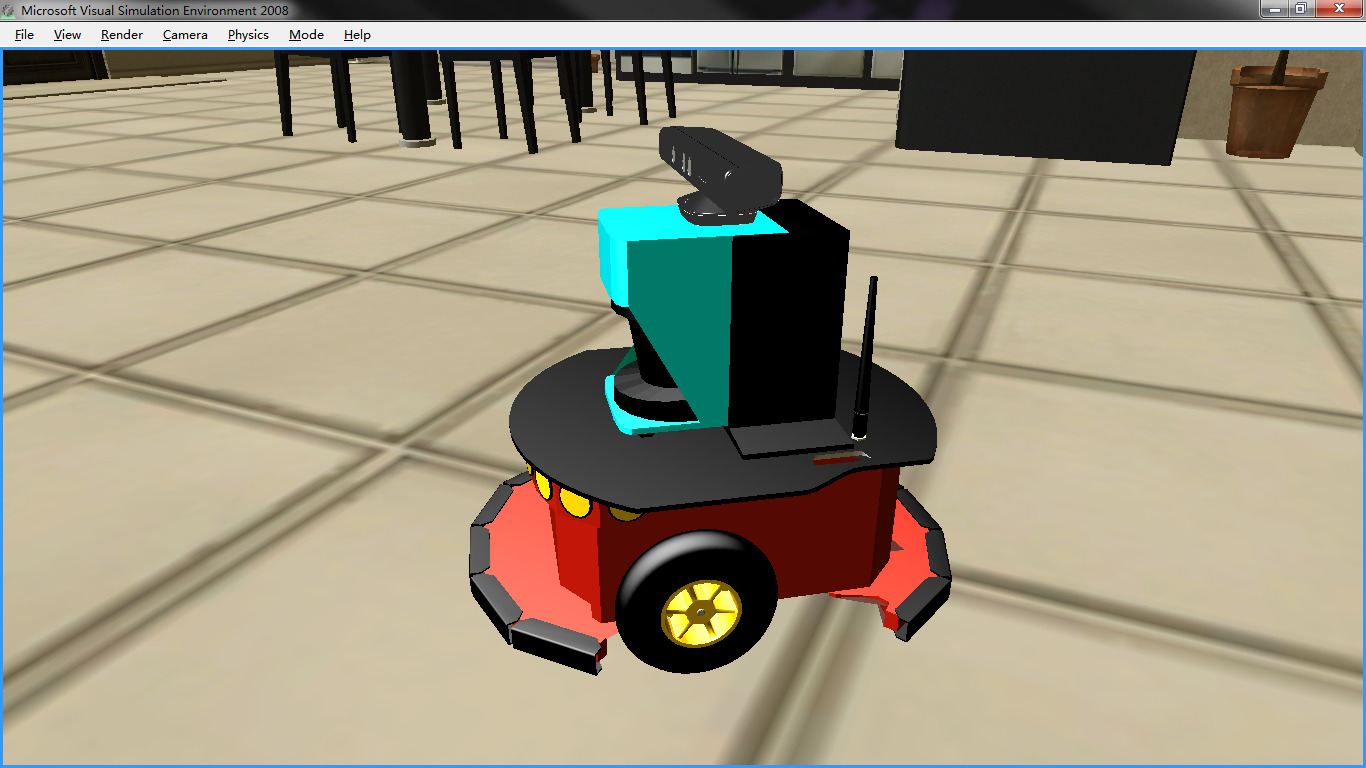
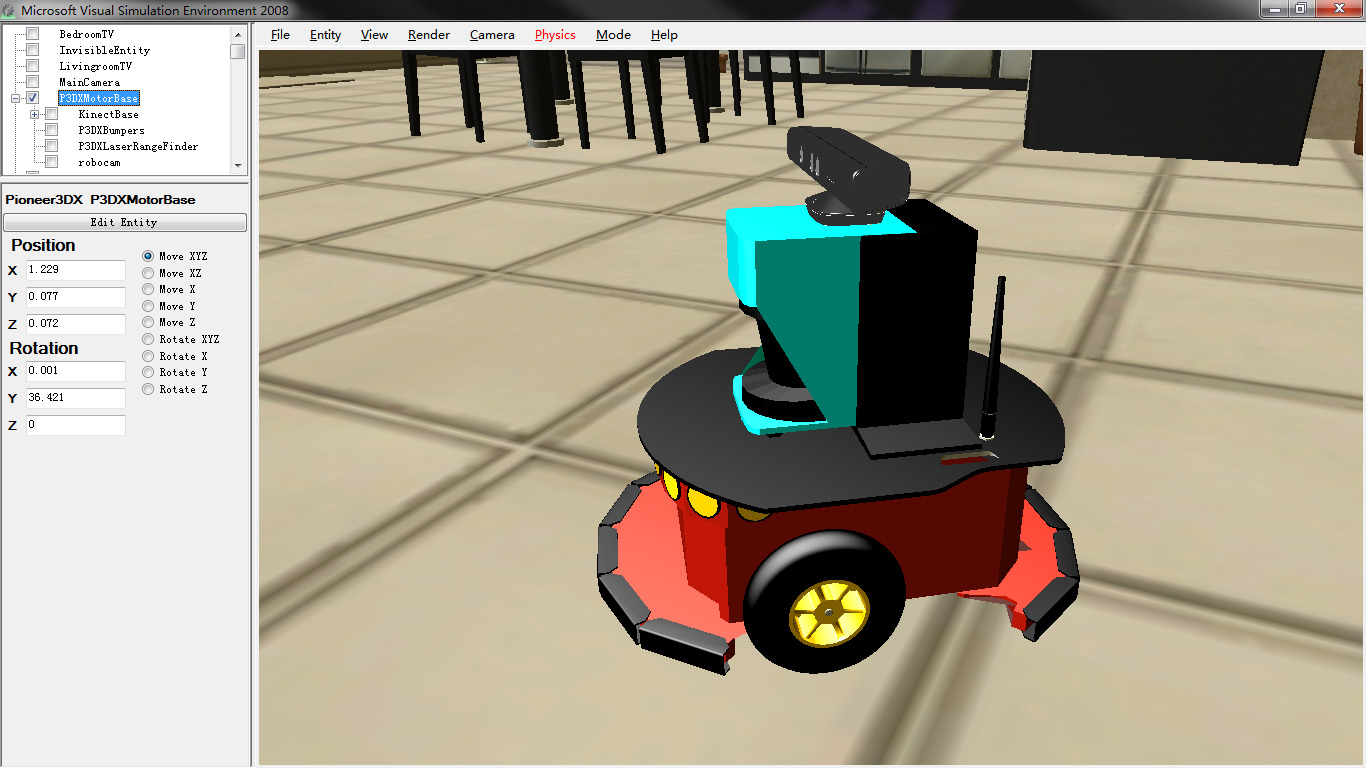
以P3DX为例:
配置代码如下:
<?xml version="1.0"?>
<Manifest xmlns:xsi="http://www.w3.org/2001/XMLSchema-instance" xmlns:xsd="http://www.w3.org/2001/XMLSchema" xmlns="http://schemas.microsoft.com/xw/2004/10/manifest.html">
<CreateServiceList>
<ServiceRecordType>
<Contract xmlns="http://schemas.microsoft.com/xw/2004/10/dssp.html">http://schemas.microsoft.com/robotics/2006/04/simulationengine.html</Contract>
<PartnerList xmlns="http://schemas.microsoft.com/xw/2004/10/dssp.html">
<Partner>
<Contract>http://schemas.microsoft.com/robotics/2006/04/simulationengine.html</Contract>
<Service>P3DX.xml</Service>
<PartnerList />
<Name>StateService</Name>
</Partner>
</PartnerList>
</ServiceRecordType>
<ServiceRecordType>
<Contract xmlns="http://schemas.microsoft.com/xw/2004/10/dssp.html">http://schemas.microsoft.com/robotics/simulation/services/2006/05/simulateddifferentialdrive.html</Contract>
<PartnerList xmlns="http://schemas.microsoft.com/xw/2004/10/dssp.html">
<Partner>
<Service>http://localhost/P3DXMotorBase</Service>
<PartnerList />
<Name xmlns:q1="http://schemas.microsoft.com/robotics/2006/04/simulation.html">q1:Entity</Name>
</Partner>
</PartnerList>
</ServiceRecordType>
<ServiceRecordType>
<Contract xmlns="http://schemas.microsoft.com/xw/2004/10/dssp.html">http://schemas.microsoft.com/robotics/simulation/services/2006/05/simulatedlrf.html</Contract>
<PartnerList xmlns="http://schemas.microsoft.com/xw/2004/10/dssp.html">
<Partner>
<Service>http://localhost/P3DXLaserRangeFinder</Service>
<PartnerList />
<Name xmlns:q2="http://schemas.microsoft.com/robotics/2006/04/simulation.html">q2:Entity</Name>
</Partner>
</PartnerList>
</ServiceRecordType>
<ServiceRecordType>
<Contract xmlns="http://schemas.microsoft.com/xw/2004/10/dssp.html">http://schemas.microsoft.com/robotics/simulation/services/2006/05/simulatedbumper.html</Contract>
<PartnerList xmlns="http://schemas.microsoft.com/xw/2004/10/dssp.html">
<Partner>
<Service>http://localhost/P3DXBumpers</Service>
<PartnerList />
<Name xmlns:q3="http://schemas.microsoft.com/robotics/2006/04/simulation.html">q3:Entity</Name>
</Partner>
</PartnerList>
</ServiceRecordType>
<ServiceRecordType>
<Contract xmlns="http://schemas.microsoft.com/xw/2004/10/dssp.html">http://schemas.microsoft.com/2006/09/simulatedwebcam.html</Contract>
<PartnerList xmlns="http://schemas.microsoft.com/xw/2004/10/dssp.html">
<Partner>
<Service>http://localhost/robocam</Service>
<PartnerList />
<Name xmlns:q4="http://schemas.microsoft.com/robotics/2006/04/simulation.html">q4:Entity</Name>
</Partner>
</PartnerList>
</ServiceRecordType>
<ServiceRecordType>
<Contract xmlns="http://schemas.microsoft.com/xw/2004/10/dssp.html">http://schemas.microsoft.com/robotics/simulation/services/2011/01/simulateddepthcam.html</Contract>
<PartnerList xmlns="http://schemas.microsoft.com/xw/2004/10/dssp.html">
<Partner>
<Service>http://localhost/KinectCamera</Service>
<PartnerList />
<Name xmlns:q5="http://schemas.microsoft.com/robotics/2006/04/simulation.html">q5:Entity</Name>
</Partner>
</PartnerList>
</ServiceRecordType>
<ServiceRecordType>
<Contract xmlns="http://schemas.microsoft.com/xw/2004/10/dssp.html">http://schemas.microsoft.com/robotics/2011/01/simulatedwebcamsensor.html</Contract>
<PartnerList xmlns="http://schemas.microsoft.com/xw/2004/10/dssp.html">
<Partner>
<Service>http://localhost/SimulatedWebcam</Service>
<PartnerList />
<Name xmlns:q6="http://schemas.microsoft.com/robotics/2006/04/simulation.html">q6:Entity</Name>
</Partner>
</PartnerList>
</ServiceRecordType>
</CreateServiceList>
</Manifest>完整版本配置如下:
<Pioneer3DX xmlns:sim="http://schemas.microsoft.com/robotics/2006/04/simulation.html" xmlns:physm="http://schemas.microsoft.com/robotics/2006/07/physicalmodel.html" xmlns:phys="http://schemas.microsoft.com/robotics/2006/04/simulation/physics.html" xmlns="http://schemas.microsoft.com/robotics/2006/04/simulationengine.html">
<sim:State>
<sim:Name>P3DXMotorBase</sim:Name>
<sim:Assets>
<sim:Mesh>Pioneer3dx.bos</sim:Mesh>
<sim:Effect>default</sim:Effect>
</sim:Assets>
<sim:Pose>
<physm:Position>
<physm:X>2</physm:X>
<physm:Y>0.077099</physm:Y>
<physm:Z>2</physm:Z>
</physm:Position>
<physm:Orientation>
<physm:X>0</physm:X>
<physm:Y>2.0103019E-07</physm:Y>
<physm:Z>-7.260728E-10</physm:Z>
<physm:W>1</physm:W>
</physm:Orientation>
</sim:Pose>
<sim:Velocity>
<physm:X>-3.3154862E-07</physm:X>
<physm:Y>1.32271339E-07</physm:Y>
<physm:Z>-3.06670131E-07</physm:Z>
</sim:Velocity>
<sim:AngularVelocity>
<physm:X>-4.037088E-06</physm:X>
<physm:Y>-5.273405E-06</physm:Y>
<physm:Z>9.124161E-06</physm:Z>
</sim:AngularVelocity>
<sim:MassDensity>
<phys:Mass>11</phys:Mass>
<phys:InertiaTensor>
<physm:X>0</physm:X>
<physm:Y>0</physm:Y>
<physm:Z>0</physm:Z>
</phys:InertiaTensor>
<phys:CenterOfMass>
<physm:Position>
<physm:X>0</physm:X>
<physm:Y>0</physm:Y>
<physm:Z>0</physm:Z>
</physm:Position>
<physm:Orientation>
<physm:X>0</physm:X>
<physm:Y>0</physm:Y>
<physm:Z>0</physm:Z>
<physm:W>0</physm:W>
</physm:Orientation>
</phys:CenterOfMass>
<phys:Density>0</phys:Density>
<phys:LinearDamping>0</phys:LinearDamping>
<phys:AngularDamping>0</phys:AngularDamping>
<phys:MassLocalPose>
<physm:Position>
<physm:X>0</physm:X>
<physm:Y>0</physm:Y>
<physm:Z>0</physm:Z>
</physm:Position>
<physm:Orientation>
<physm:X>0</physm:X>
<physm:Y>0</physm:Y>
<physm:Z>0</physm:Z>
<physm:W>1</physm:W>
</physm:Orientation>
</phys:MassLocalPose>
</sim:MassDensity>
<sim:Flags>Dynamic</sim:Flags>
</sim:State>
<Flags>None</Flags>
<ChildCount>4</ChildCount>
<ReferenceFrame>Global</ReferenceFrame>
<ServiceContract>http://schemas.microsoft.com/robotics/simulation/services/2006/05/simulateddifferentialdrive.html</ServiceContract>
<EmbeddedResourceAssemblies />
<MeshScale>
<physm:X>1</physm:X>
<physm:Y>1</physm:Y>
<physm:Z>1</physm:Z>
</MeshScale>
<MeshRotation>
<physm:X>0</physm:X>
<physm:Y>0</physm:Y>
<physm:Z>0</physm:Z>
</MeshRotation>
<MeshTranslation>
<physm:X>0</physm:X>
<physm:Y>0</physm:Y>
<physm:Z>0</physm:Z>
</MeshTranslation>
<IsEnabled>true</IsEnabled>
<MotorTorqueScaling>20</MotorTorqueScaling>
<RightWheel>
<sim:State>
<sim:Name>P3DXMotorBase:Right wheel</sim:Name>
<sim:Assets>
<sim:Mesh>PioneerWheel.bos</sim:Mesh>
</sim:Assets>
<sim:Pose>
<physm:Position>
<physm:X>2</physm:X>
<physm:Y>0.077099</physm:Y>
<physm:Z>2</physm:Z>
</physm:Position>
<physm:Orientation>
<physm:X>0</physm:X>
<physm:Y>2.0103019E-07</physm:Y>
<physm:Z>-7.260728E-10</physm:Z>
<physm:W>1</physm:W>
</physm:Orientation>
</sim:Pose>
<sim:Velocity>
<physm:X>0</physm:X>
<physm:Y>0</physm:Y>
<physm:Z>0</physm:Z>
</sim:Velocity>
<sim:AngularVelocity>
<physm:X>0</physm:X>
<physm:Y>0</physm:Y>
<physm:Z>0</physm:Z>
</sim:AngularVelocity>
<sim:MassDensity>
<phys:Mass>0</phys:Mass>
<phys:InertiaTensor>
<physm:X>0</physm:X>
<physm:Y>0</physm:Y>
<physm:Z>0</physm:Z>
</phys:InertiaTensor>
<phys:CenterOfMass>
<physm:Position>
<physm:X>0</physm:X>
<physm:Y>0</physm:Y>
<physm:Z>0</physm:Z>
</physm:Position>
<physm:Orientation>
<physm:X>0</physm:X>
<physm:Y>0</physm:Y>
<physm:Z>0</physm:Z>
<physm:W>0</physm:W>
</physm:Orientation>
</phys:CenterOfMass>
<phys:Density>0</phys:Density>
<phys:LinearDamping>0</phys:LinearDamping>
<phys:AngularDamping>0</phys:AngularDamping>
<phys:MassLocalPose>
<physm:Position>
<physm:X>0</physm:X>
<physm:Y>0</physm:Y>
<physm:Z>0</physm:Z>
</physm:Position>
<physm:Orientation>
<physm:X>0</physm:X>
<physm:Y>0</physm:Y>
<physm:Z>0</physm:Z>
<physm:W>0</physm:W>
</physm:Orientation>
</phys:MassLocalPose>
</sim:MassDensity>
<sim:Flags>Dynamic</sim:Flags>
</sim:State>
<Flags>None</Flags>
<ChildCount>0</ChildCount>
<ReferenceFrame>Global</ReferenceFrame>
<EmbeddedResourceAssemblies />
<MeshScale>
<physm:X>1</physm:X>
<physm:Y>1</physm:Y>
<physm:Z>1</physm:Z>
</MeshScale>
<MeshRotation>
<physm:X>0</physm:X>
<physm:Y>180</physm:Y>
<physm:Z>0</physm:Z>
</MeshRotation>
<MeshTranslation>
<physm:X>0</physm:X>
<physm:Y>0</physm:Y>
<physm:Z>0</physm:Z>
</MeshTranslation>
<WheelShape>
<phys:WheelState>
<phys:Name>P3DXMotorBase/front right wheel</phys:Name>
<phys:ShapeId>Wheel</phys:ShapeId>
<phys:Dimensions>
<physm:X>0</physm:X>
<physm:Y>0</physm:Y>
<physm:Z>0</physm:Z>
</phys:Dimensions>
<phys:Radius>0.08</phys:Radius>
<phys:Material>
<phys:Name>default wheel material</phys:Name>
<phys:Restitution>0</phys:Restitution>
<phys:DynamicFriction>0</phys:DynamicFriction>
<phys:StaticFriction>0</phys:StaticFriction>
<phys:MaterialIndex>497</phys:MaterialIndex>
</phys:Material>
<phys:MassDensity>
<phys:Mass>0.1</phys:Mass>
<phys:InertiaTensor>
<physm:X>0</physm:X>
<physm:Y>0</physm:Y>
<physm:Z>0</physm:Z>
</phys:InertiaTensor>
<phys:CenterOfMass>
<physm:Position>
<physm:X>0</physm:X>
<physm:Y>0</physm:Y>
<physm:Z>0</physm:Z>
</physm:Position>
<physm:Orientation>
<physm:X>0</physm:X>
<physm:Y>0</physm:Y>
<physm:Z>0</physm:Z>
<physm:W>0</physm:W>
</physm:Orientation>
</phys:CenterOfMass>
<phys:Density>0</phys:Density>
<phys:LinearDamping>0</phys:LinearDamping>
<phys:AngularDamping>0</phys:AngularDamping>
<phys:MassLocalPose>
<physm:Position>
<physm:X>0</physm:X>
<physm:Y>0</physm:Y>
<physm:Z>0</physm:Z>
</physm:Position>
<physm:Orientation>
<physm:X>0</physm:X>
<physm:Y>0</physm:Y>
<physm:Z>0</physm:Z>
<physm:W>0</physm:W>
</physm:Orientation>
</phys:MassLocalPose>
</phys:MassDensity>
<phys:LocalPose>
<physm:Position>
<physm:X>0.1565</physm:X>
<physm:Y>0.08</physm:Y>
<physm:Z>-0.05</physm:Z>
</physm:Position>
<physm:Orientation>
<physm:X>0.842458248</physm:X>
<physm:Y>0</physm:Y>
<physm:Z>0</physm:Z>
<physm:W>0.5387616</physm:W>
</physm:Orientation>
</phys:LocalPose>
<phys:TextureFileName />
<phys:DiffuseColor>
<physm:X>0.5</physm:X>
<physm:Y>0.5</physm:Y>
<physm:Z>0.5</physm:Z>
<physm:W>1</physm:W>
</phys:DiffuseColor>
<phys:EnableContactNotifications>false</phys:EnableContactNotifications>
<phys:InnerRadius>0.055999998</phys:InnerRadius>
<phys:SuspensionTravel>0</phys:SuspensionTravel>
<phys:Flags>OverrideAxleSpeed</phys:Flags>
<phys:AxleSpeed>0</phys:AxleSpeed>
<phys:BrakeTorque>0</phys:BrakeTorque>
</phys:WheelState>
</WheelShape>
<Rotations>-8.31889248</Rotations>
</RightWheel>
<LeftWheel>
<sim:State>
<sim:Name>P3DXMotorBase:Left wheel</sim:Name>
<sim:Assets>
<sim:Mesh>PioneerWheel.bos</sim:Mesh>
</sim:Assets>
<sim:Pose>
<physm:Position>
<physm:X>2</physm:X>
<physm:Y>0.077099</physm:Y>
<physm:Z>2</physm:Z>
</physm:Position>
<physm:Orientation>
<physm:X>0</physm:X>
<physm:Y>2.0103019E-07</physm:Y>
<physm:Z>-7.260728E-10</physm:Z>
<physm:W>1</physm:W>
</physm:Orientation>
</sim:Pose>
<sim:Velocity>
<physm:X>0</physm:X>
<physm:Y>0</physm:Y>
<physm:Z>0</physm:Z>
</sim:Velocity>
<sim:AngularVelocity>
<physm:X>0</physm:X>
<physm:Y>0</physm:Y>
<physm:Z>0</physm:Z>
</sim:AngularVelocity>
<sim:MassDensity>
<phys:Mass>0</phys:Mass>
<phys:InertiaTensor>
<physm:X>0</physm:X>
<physm:Y>0</physm:Y>
<physm:Z>0</physm:Z>
</phys:InertiaTensor>
<phys:CenterOfMass>
<physm:Position>
<physm:X>0</physm:X>
<physm:Y>0</physm:Y>
<physm:Z>0</physm:Z>
</physm:Position>
<physm:Orientation>
<physm:X>0</physm:X>
<physm:Y>0</physm:Y>
<physm:Z>0</physm:Z>
<physm:W>0</physm:W>
</physm:Orientation>
</phys:CenterOfMass>
<phys:Density>0</phys:Density>
<phys:LinearDamping>0</phys:LinearDamping>
<phys:AngularDamping>0</phys:AngularDamping>
<phys:MassLocalPose>
<physm:Position>
<physm:X>0</physm:X>
<physm:Y>0</physm:Y>
<physm:Z>0</physm:Z>
</physm:Position>
<physm:Orientation>
<physm:X>0</physm:X>
<physm:Y>0</physm:Y>
<physm:Z>0</physm:Z>
<physm:W>0</physm:W>
</physm:Orientation>
</phys:MassLocalPose>
</sim:MassDensity>
<sim:Flags>Dynamic</sim:Flags>
</sim:State>
<Flags>None</Flags>
<ChildCount>0</ChildCount>
<ReferenceFrame>Global</ReferenceFrame>
<EmbeddedResourceAssemblies />
<MeshScale>
<physm:X>1</physm:X>
<physm:Y>1</physm:Y>
<physm:Z>1</physm:Z>
</MeshScale>
<MeshRotation>
<physm:X>0</physm:X>
<physm:Y>0</physm:Y>
<physm:Z>0</physm:Z>
</MeshRotation>
<MeshTranslation>
<physm:X>0</physm:X>
<physm:Y>0</physm:Y>
<physm:Z>0</physm:Z>
</MeshTranslation>
<WheelShape>
<phys:WheelState>
<phys:Name>P3DXMotorBase/front left wheel</phys:Name>
<phys:ShapeId>Wheel</phys:ShapeId>
<phys:Dimensions>
<physm:X>0</physm:X>
<physm:Y>0</physm:Y>
<physm:Z>0</physm:Z>
</phys:Dimensions>
<phys:Radius>0.08</phys:Radius>
<phys:Material>
<phys:Name>default wheel material</phys:Name>
<phys:Restitution>0</phys:Restitution>
<phys:DynamicFriction>0</phys:DynamicFriction>
<phys:StaticFriction>0</phys:StaticFriction>
<phys:MaterialIndex>496</phys:MaterialIndex>
</phys:Material>
<phys:MassDensity>
<phys:Mass>0.1</phys:Mass>
<phys:InertiaTensor>
<physm:X>0</physm:X>
<physm:Y>0</physm:Y>
<physm:Z>0</physm:Z>
</phys:InertiaTensor>
<phys:CenterOfMass>
<physm:Position>
<physm:X>0</physm:X>
<physm:Y>0</physm:Y>
<physm:Z>0</physm:Z>
</physm:Position>
<physm:Orientation>
<physm:X>0</physm:X>
<physm:Y>0</physm:Y>
<physm:Z>0</physm:Z>
<physm:W>0</physm:W>
</physm:Orientation>
</phys:CenterOfMass>
<phys:Density>0</phys:Density>
<phys:LinearDamping>0</phys:LinearDamping>
<phys:AngularDamping>0</phys:AngularDamping>
<phys:MassLocalPose>
<physm:Position>
<physm:X>0</physm:X>
<physm:Y>0</physm:Y>
<physm:Z>0</physm:Z>
</physm:Position>
<physm:Orientation>
<physm:X>0</physm:X>
<physm:Y>0</physm:Y>
<physm:Z>0</physm:Z>
<physm:W>0</physm:W>
</physm:Orientation>
</phys:MassLocalPose>
</phys:MassDensity>
<phys:LocalPose>
<physm:Position>
<physm:X>-0.1565</physm:X>
<physm:Y>0.08</physm:Y>
<physm:Z>-0.05</physm:Z>
</physm:Position>
<physm:Orientation>
<physm:X>0.999986649</physm:X>
<physm:Y>0</physm:Y>
<physm:Z>0</physm:Z>
<physm:W>0.00517276628</physm:W>
</physm:Orientation>
</phys:LocalPose>
<phys:TextureFileName />
<phys:DiffuseColor>
<physm:X>0.5</physm:X>
<physm:Y>0.5</physm:Y>
<physm:Z>0.5</physm:Z>
<physm:W>1</physm:W>
</phys:DiffuseColor>
<phys:EnableContactNotifications>false</phys:EnableContactNotifications>
<phys:InnerRadius>0.055999998</phys:InnerRadius>
<phys:SuspensionTravel>0</phys:SuspensionTravel>
<phys:Flags>OverrideAxleSpeed</phys:Flags>
<phys:AxleSpeed>0</phys:AxleSpeed>
<phys:BrakeTorque>0</phys:BrakeTorque>
</phys:WheelState>
</WheelShape>
<Rotations>7.50164652</Rotations>
</LeftWheel>
<ChassisShape>
<phys:BoxState>
<phys:Name>P3DXMotorBase/Chassis</phys:Name>
<phys:ShapeId>Box</phys:ShapeId>
<phys:Dimensions>
<physm:X>0.393</physm:X>
<physm:Y>0.18</physm:Y>
<physm:Z>0.4</physm:Z>
</phys:Dimensions>
<phys:Radius>0</phys:Radius>
<phys:Material>
<phys:Name>high friction</phys:Name>
<phys:Restitution>0</phys:Restitution>
<phys:DynamicFriction>1</phys:DynamicFriction>
<phys:StaticFriction>20</phys:StaticFriction>
<phys:MaterialIndex>495</phys:MaterialIndex>
</phys:Material>
<phys:MassDensity>
<phys:Mass>9</phys:Mass>
<phys:InertiaTensor>
<physm:X>0</physm:X>
<physm:Y>0</physm:Y>
<physm:Z>0</physm:Z>
</phys:InertiaTensor>
<phys:CenterOfMass>
<physm:Position>
<physm:X>0</physm:X>
<physm:Y>0</physm:Y>
<physm:Z>0</physm:Z>
</physm:Position>
<physm:Orientation>
<physm:X>0</physm:X>
<physm:Y>0</physm:Y>
<physm:Z>0</physm:Z>
<physm:W>0</physm:W>
</physm:Orientation>
</phys:CenterOfMass>
<phys:Density>0</phys:Density>
<phys:LinearDamping>0</phys:LinearDamping>
<phys:AngularDamping>0</phys:AngularDamping>
<phys:MassLocalPose>
<physm:Position>
<physm:X>0</physm:X>
<physm:Y>0</physm:Y>
<physm:Z>0</physm:Z>
</physm:Position>
<physm:Orientation>
<physm:X>0</physm:X>
<physm:Y>0</physm:Y>
<physm:Z>0</physm:Z>
<physm:W>0</physm:W>
</physm:Orientation>
</phys:MassLocalPose>
</phys:MassDensity>
<phys:LocalPose>
<physm:Position>
<physm:X>0</physm:X>
<physm:Y>0.14</physm:Y>
<physm:Z>0</physm:Z>
</physm:Position>
<physm:Orientation>
<physm:X>0</physm:X>
<physm:Y>0</physm:Y>
<physm:Z>0</physm:Z>
<physm:W>-1</physm:W>
</physm:Orientation>
</phys:LocalPose>
<phys:TextureFileName />
<phys:DiffuseColor>
<physm:X>0.8</physm:X>
<physm:Y>0.25</physm:Y>
<physm:Z>0.25</physm:Z>
<physm:W>1</physm:W>
</phys:DiffuseColor>
<phys:EnableContactNotifications>false</phys:EnableContactNotifications>
</phys:BoxState>
</ChassisShape>
<CasterWheelShape>
<phys:SphereState>
<phys:Name>P3DXMotorBase/Caster wheel</phys:Name>
<phys:ShapeId>Sphere</phys:ShapeId>
<phys:Dimensions>
<physm:X>0</physm:X>
<physm:Y>0</physm:Y>
<physm:Z>0</physm:Z>
</phys:Dimensions>
<phys:Radius>0.025</phys:Radius>
<phys:Material>
<phys:Name>small friction with anisotropy</phys:Name>
<phys:Restitution>0.5</phys:Restitution>
<phys:DynamicFriction>0.5</phys:DynamicFriction>
<phys:StaticFriction>1</phys:StaticFriction>
<phys:MaterialIndex>494</phys:MaterialIndex>
<phys:Advanced>
<phys:AnisotropicStaticFriction>0.4</phys:AnisotropicStaticFriction>
<phys:AnisotropicDynamicFriction>0.3</phys:AnisotropicDynamicFriction>
<phys:AnisotropyDirection>
<physm:X>0</physm:X>
<physm:Y>0</physm:Y>
<physm:Z>1</physm:Z>
</phys:AnisotropyDirection>
<phys:RestitutionCombineMode>Unspecified</phys:RestitutionCombineMode>
<phys:FrictionCombineMode>Unspecified</phys:FrictionCombineMode>
<phys:Optical />
</phys:Advanced>
</phys:Material>
<phys:MassDensity>
<phys:Mass>2</phys:Mass>
<phys:InertiaTensor>
<physm:X>0</physm:X>
<physm:Y>0</physm:Y>
<physm:Z>0</physm:Z>
</phys:InertiaTensor>
<phys:CenterOfMass>
<physm:Position>
<physm:X>0</physm:X>
<physm:Y>0</physm:Y>
<physm:Z>0</physm:Z>
</physm:Position>
<physm:Orientation>
<physm:X>0</physm:X>
<physm:Y>0</physm:Y>
<physm:Z>0</physm:Z>
<physm:W>0</physm:W>
</physm:Orientation>
</phys:CenterOfMass>
<phys:Density>0</phys:Density>
<phys:LinearDamping>0</phys:LinearDamping>
<phys:AngularDamping>0</phys:AngularDamping>
<phys:MassLocalPose>
<physm:Position>
<physm:X>0</physm:X>
<physm:Y>0</physm:Y>
<physm:Z>0</physm:Z>
</physm:Position>
<physm:Orientation>
<physm:X>0</physm:X>
<physm:Y>0</physm:Y>
<physm:Z>0</physm:Z>
<physm:W>0</physm:W>
</physm:Orientation>
</phys:MassLocalPose>
</phys:MassDensity>
<phys:LocalPose>
<physm:Position>
<physm:X>0</physm:X>
<physm:Y>0.025</physm:Y>
<physm:Z>0.175</physm:Z>
</physm:Position>
<physm:Orientation>
<physm:X>0</physm:X>
<physm:Y>0</physm:Y>
<physm:Z>0</physm:Z>
<physm:W>-1</physm:W>
</physm:Orientation>
</phys:LocalPose>
<phys:TextureFileName />
<phys:DiffuseColor>
<physm:X>0.5</physm:X>
<physm:Y>0.5</physm:Y>
<physm:Z>0.5</physm:Z>
<physm:W>1</physm:W>
</phys:DiffuseColor>
<phys:EnableContactNotifications>false</phys:EnableContactNotifications>
</phys:SphereState>
</CasterWheelShape>
<RotateDegreesAngleThreshold>0</RotateDegreesAngleThreshold>
<TimeoutSeconds>0</TimeoutSeconds>
</Pioneer3DX>
<LaserRangeFinderEntity xmlns:sim="http://schemas.microsoft.com/robotics/2006/04/simulation.html" xmlns:physm="http://schemas.microsoft.com/robotics/2006/07/physicalmodel.html" xmlns:phys="http://schemas.microsoft.com/robotics/2006/04/simulation/physics.html" xmlns="http://schemas.microsoft.com/robotics/2006/04/simulationengine.html">
<sim:State>
<sim:Name>P3DXLaserRangeFinder</sim:Name>
<sim:Assets>
<sim:Effect>LaserRangeFinder.fx</sim:Effect>
</sim:Assets>
<sim:Pose>
<physm:Position>
<physm:X>2.00002766</physm:X>
<physm:Y>0.07709907</physm:Y>
<physm:Z>1.99996006</physm:Z>
</physm:Position>
<physm:Orientation>
<physm:X>6.653897E-05</physm:X>
<physm:Y>-7.617568E-06</physm:Y>
<physm:Z>4.62663738E-05</physm:Z>
<physm:W>0.99999994</physm:W>
</physm:Orientation>
</sim:Pose>
<sim:Velocity>
<physm:X>3.78771038E-05</physm:X>
<physm:Y>1.78447647E-06</physm:Y>
<physm:Z>-1.496551E-05</physm:Z>
</sim:Velocity>
<sim:AngularVelocity>
<physm:X>-0.000238511231</physm:X>
<physm:Y>-9.99704062E-05</physm:Y>
<physm:Z>-0.0008120631</physm:Z>
</sim:AngularVelocity>
<sim:MassDensity>
<phys:Mass>0.5</phys:Mass>
<phys:InertiaTensor>
<physm:X>0</physm:X>
<physm:Y>0</physm:Y>
<physm:Z>0</physm:Z>
</phys:InertiaTensor>
<phys:CenterOfMass>
<physm:Position>
<physm:X>0</physm:X>
<physm:Y>0</physm:Y>
<physm:Z>0</physm:Z>
</physm:Position>
<physm:Orientation>
<physm:X>0</physm:X>
<physm:Y>0</physm:Y>
<physm:Z>0</physm:Z>
<physm:W>0</physm:W>
</physm:Orientation>
</phys:CenterOfMass>
<phys:Density>0</phys:Density>
<phys:LinearDamping>0</phys:LinearDamping>
<phys:AngularDamping>0</phys:AngularDamping>
<phys:MassLocalPose>
<physm:Position>
<physm:X>0</physm:X>
<physm:Y>0</physm:Y>
<physm:Z>0</physm:Z>
</physm:Position>
<physm:Orientation>
<physm:X>0</physm:X>
<physm:Y>0</physm:Y>
<physm:Z>0</physm:Z>
<physm:W>0</physm:W>
</physm:Orientation>
</phys:MassLocalPose>
</sim:MassDensity>
<sim:Flags>Dynamic</sim:Flags>
</sim:State>
<Flags>UsesAlphaBlending DisableViewFrustumCulling</Flags>
<ChildCount>0</ChildCount>
<ParentJoint>
<physm:State>
<physm:Name>P3DXLaserRangeFinder's parent joint</physm:Name>
<physm:Connectors>
<physm:EntityJointConnector>
<physm:JointNormal>
<physm:X>1.96775329E-09</physm:X>
<physm:Y>1</physm:Y>
<physm:Z>1.40716976E-08</physm:Z>
</physm:JointNormal>
<physm:JointAxis>
<physm:X>1</physm:X>
<physm:Y>-1.96768624E-09</physm:Y>
<physm:Z>-4.76237028E-06</physm:Z>
</physm:JointAxis>
<physm:JointConnectPoint>
<physm:X>0</physm:X>
<physm:Y>0</physm:Y>
<physm:Z>0</physm:Z>
</physm:JointConnectPoint>
</physm:EntityJointConnector>
<physm:EntityJointConnector>
<physm:JointNormal>
<physm:X>-1.07012754E-08</physm:X>
<physm:Y>1</physm:Y>
<physm:Z>1.02300222E-08</physm:Z>
</physm:JointNormal>
<physm:JointAxis>
<physm:X>1</physm:X>
<physm:Y>1.07013234E-08</physm:Y>
<physm:Z>-4.762509E-06</physm:Z>
</physm:JointAxis>
<physm:JointConnectPoint>
<physm:X>-7.048179E-14</physm:X>
<physm:Y>1.51396393E-16</physm:Y>
<physm:Z>-1.47992978E-08</physm:Z>
</physm:JointConnectPoint>
</physm:EntityJointConnector>
</physm:Connectors>
<physm:MaximumForce>0</physm:MaximumForce>
<physm:MaximumTorque>0</physm:MaximumTorque>
<physm:EnableCollisions>false</physm:EnableCollisions>
<physm:Projection>
<physm:ProjectionMode>LinearMinimumDistance</physm:ProjectionMode>
<physm:ProjectionDistanceThreshold>1.401298E-45</physm:ProjectionDistanceThreshold>
<physm:ProjectionAngleThreshold>1.401298E-45</physm:ProjectionAngleThreshold>
</physm:Projection>
</physm:State>
</ParentJoint>
<ReferenceFrame>Global</ReferenceFrame>
<ServiceContract>http://schemas.microsoft.com/robotics/simulation/services/2006/05/simulatedlrf.html</ServiceContract>
<EmbeddedResourceAssemblies />
<MeshScale>
<physm:X>1</physm:X>
<physm:Y>1</physm:Y>
<physm:Z>1</physm:Z>
</MeshScale>
<MeshRotation>
<physm:X>0</physm:X>
<physm:Y>0</physm:Y>
<physm:Z>0</physm:Z>
</MeshRotation>
<MeshTranslation>
<physm:X>0</physm:X>
<physm:Y>0</physm:Y>
<physm:Z>0</physm:Z>
</MeshTranslation>
<LaserBox>
<phys:BoxState>
<phys:Name>P3DXLaserRangeFinder/SickLRF</phys:Name>
<phys:ShapeId>Box</phys:ShapeId>
<phys:Dimensions>
<physm:X>0.15</physm:X>
<physm:Y>0.2</physm:Y>
<physm:Z>0.18</physm:Z>
</phys:Dimensions>
<phys:Radius>0</phys:Radius>
<phys:MassDensity>
<phys:Mass>0.5</phys:Mass>
<phys:InertiaTensor>
<physm:X>0</physm:X>
<physm:Y>0</physm:Y>
<physm:Z>0</physm:Z>
</phys:InertiaTensor>
<phys:CenterOfMass>
<physm:Position>
<physm:X>0</physm:X>
<physm:Y>0</physm:Y>
<physm:Z>0</physm:Z>
</physm:Position>
<physm:Orientation>
<physm:X>0</physm:X>
<physm:Y>0</physm:Y>
<physm:Z>0</physm:Z>
<physm:W>0</physm:W>
</physm:Orientation>
</phys:CenterOfMass>
<phys:Density>0</phys:Density>
<phys:LinearDamping>0</phys:LinearDamping>
<phys:AngularDamping>0</phys:AngularDamping>
<phys:MassLocalPose>
<physm:Position>
<physm:X>0</physm:X>
<physm:Y>0</physm:Y>
<physm:Z>0</physm:Z>
</physm:Position>
<physm:Orientation>
<physm:X>0</physm:X>
<physm:Y>0</physm:Y>
<physm:Z>0</physm:Z>
<physm:W>0</physm:W>
</physm:Orientation>
</phys:MassLocalPose>
</phys:MassDensity>
<phys:LocalPose>
<physm:Position>
<physm:X>0</physm:X>
<physm:Y>0.3</physm:Y>
<physm:Z>0</physm:Z>
</physm:Position>
<physm:Orientation>
<physm:X>0</physm:X>
<physm:Y>0</physm:Y>
<physm:Z>0</physm:Z>
<physm:W>1</physm:W>
</physm:Orientation>
</phys:LocalPose>
<phys:TextureFileName />
<phys:DiffuseColor>
<physm:X>0.25</physm:X>
<physm:Y>0.25</physm:Y>
<physm:Z>0.8</physm:Z>
<physm:W>1</physm:W>
</phys:DiffuseColor>
<phys:EnableContactNotifications>false</phys:EnableContactNotifications>
</phys:BoxState>
</LaserBox>
<ImpactPointEffect>LaserRangeFinder.fx</ImpactPointEffect>
</LaserRangeFinderEntity>
<BumperArrayEntity xmlns:sim="http://schemas.microsoft.com/robotics/2006/04/simulation.html" xmlns:physm="http://schemas.microsoft.com/robotics/2006/07/physicalmodel.html" xmlns:phys="http://schemas.microsoft.com/robotics/2006/04/simulation/physics.html" xmlns="http://schemas.microsoft.com/robotics/2006/04/simulationengine.html">
<sim:State>
<sim:Name>P3DXBumpers</sim:Name>
<sim:Assets>
<sim:Effect>default</sim:Effect>
</sim:Assets>
<sim:Pose>
<physm:Position>
<physm:X>2.00000525</physm:X>
<physm:Y>0.077099</physm:Y>
<physm:Z>1.99999082</physm:Z>
</physm:Position>
<physm:Orientation>
<physm:X>9.216944E-05</physm:X>
<physm:Y>6.625781E-05</physm:Y>
<physm:Z>5.34090141E-05</physm:Z>
<physm:W>1</physm:W>
</physm:Orientation>
</sim:Pose>
<sim:Velocity>
<physm:X>-8.161184E-08</physm:X>
<physm:Y>-4.97797E-08</physm:Y>
<physm:Z>-1.62110337E-06</physm:Z>
</sim:Velocity>
<sim:AngularVelocity>
<physm:X>3.628642E-07</physm:X>
<physm:Y>2.53038923E-08</physm:Y>
<physm:Z>8.441286E-07</physm:Z>
</sim:AngularVelocity>
<sim:MassDensity>
<phys:Mass>0.002</phys:Mass>
<phys:InertiaTensor>
<physm:X>0</physm:X>
<physm:Y>0</physm:Y>
<physm:Z>0</physm:Z>
</phys:InertiaTensor>
<phys:CenterOfMass>
<physm:Position>
<physm:X>0</physm:X>
<physm:Y>0</physm:Y>
<physm:Z>0</physm:Z>
</physm:Position>
<physm:Orientation>
<physm:X>0</physm:X>
<physm:Y>0</physm:Y>
<physm:Z>0</physm:Z>
<physm:W>0</physm:W>
</physm:Orientation>
</phys:CenterOfMass>
<phys:Density>0</phys:Density>
<phys:LinearDamping>0</phys:LinearDamping>
<phys:AngularDamping>0</phys:AngularDamping>
<phys:MassLocalPose>
<physm:Position>
<physm:X>0</physm:X>
<physm:Y>0</physm:Y>
<physm:Z>0</physm:Z>
</physm:Position>
<physm:Orientation>
<physm:X>0</physm:X>
<physm:Y>0</physm:Y>
<physm:Z>0</physm:Z>
<physm:W>0</physm:W>
</physm:Orientation>
</phys:MassLocalPose>
</sim:MassDensity>
<sim:Flags>Dynamic</sim:Flags>
</sim:State>
<Flags>DisableRendering</Flags>
<ChildCount>0</ChildCount>
<ParentJoint>
<physm:State>
<physm:Name>P3DXBumpers's parent joint</physm:Name>
<physm:Connectors>
<physm:EntityJointConnector>
<physm:JointNormal>
<physm:X>1.96775329E-09</physm:X>
<physm:Y>1</physm:Y>
<physm:Z>1.40716976E-08</physm:Z>
</physm:JointNormal>
<physm:JointAxis>
<physm:X>1</physm:X>
<physm:Y>-1.96768624E-09</physm:Y>
<physm:Z>-4.76237028E-06</physm:Z>
</physm:JointAxis>
<physm:JointConnectPoint>
<physm:X>0</physm:X>
<physm:Y>0</physm:Y>
<physm:Z>0</physm:Z>
</physm:JointConnectPoint>
</physm:EntityJointConnector>
<physm:EntityJointConnector>
<physm:JointNormal>
<physm:X>1.96775329E-09</physm:X>
<physm:Y>1</physm:Y>
<physm:Z>1.40716976E-08</physm:Z>
</physm:JointNormal>
<physm:JointAxis>
<physm:X>1</physm:X>
<physm:Y>-1.96768624E-09</physm:Y>
<physm:Z>-4.76237028E-06</physm:Z>
</physm:JointAxis>
<physm:JointConnectPoint>
<physm:X>0</physm:X>
<physm:Y>0</physm:Y>
<physm:Z>0</physm:Z>
</physm:JointConnectPoint>
</physm:EntityJointConnector>
</physm:Connectors>
<physm:MaximumForce>0</physm:MaximumForce>
<physm:MaximumTorque>0</physm:MaximumTorque>
<physm:EnableCollisions>false</physm:EnableCollisions>
<physm:Projection>
<physm:ProjectionMode>LinearMinimumDistance</physm:ProjectionMode>
<physm:ProjectionDistanceThreshold>1.401298E-45</physm:ProjectionDistanceThreshold>
<physm:ProjectionAngleThreshold>1.401298E-45</physm:ProjectionAngleThreshold>
</physm:Projection>
</physm:State>
</ParentJoint>
<ReferenceFrame>Global</ReferenceFrame>
<ServiceContract>http://schemas.microsoft.com/robotics/simulation/services/2006/05/simulatedbumper.html</ServiceContract>
<EmbeddedResourceAssemblies />
<MeshScale>
<physm:X>1</physm:X>
<physm:Y>1</physm:Y>
<physm:Z>1</physm:Z>
</MeshScale>
<MeshRotation>
<physm:X>0</physm:X>
<physm:Y>0</physm:Y>
<physm:Z>0</physm:Z>
</MeshRotation>
<MeshTranslation>
<physm:X>0</physm:X>
<physm:Y>0</physm:Y>
<physm:Z>0</physm:Z>
</MeshTranslation>
<Shapes>
<BoxShape>
<phys:BoxState>
<phys:Name>/P3DXBumpers/front</phys:Name>
<phys:ShapeId>Box</phys:ShapeId>
<phys:Dimensions>
<physm:X>0.4</physm:X>
<physm:Y>0.03</physm:Y>
<physm:Z>0.03</physm:Z>
</phys:Dimensions>
<phys:Radius>0</phys:Radius>
<phys:MassDensity>
<phys:Mass>0.001</phys:Mass>
<phys:InertiaTensor>
<physm:X>0</physm:X>
<physm:Y>0</physm:Y>
<physm:Z>0</physm:Z>
</phys:InertiaTensor>
<phys:CenterOfMass>
<physm:Position>
<physm:X>0</physm:X>
<physm:Y>0</physm:Y>
<physm:Z>0</physm:Z>
</physm:Position>
<physm:Orientation>
<physm:X>0</physm:X>
<physm:Y>0</physm:Y>
<physm:Z>0</physm:Z>
<physm:W>0</physm:W>
</physm:Orientation>
</phys:CenterOfMass>
<phys:Density>0</phys:Density>
<phys:LinearDamping>0</phys:LinearDamping>
<phys:AngularDamping>0</phys:AngularDamping>
<phys:MassLocalPose>
<physm:Position>
<physm:X>0</physm:X>
<physm:Y>0</physm:Y>
<physm:Z>0</physm:Z>
</physm:Position>
<physm:Orientation>
<physm:X>0</physm:X>
<physm:Y>0</physm:Y>
<physm:Z>0</physm:Z>
<physm:W>0</physm:W>
</physm:Orientation>
</phys:MassLocalPose>
</phys:MassDensity>
<phys:LocalPose>
<physm:Position>
<physm:X>0</physm:X>
<physm:Y>0.05</physm:Y>
<physm:Z>-0.25</physm:Z>
</physm:Position>
<physm:Orientation>
<physm:X>0</physm:X>
<physm:Y>0</physm:Y>
<physm:Z>0</physm:Z>
<physm:W>1</physm:W>
</physm:Orientation>
</phys:LocalPose>
<phys:TextureFileName />
<phys:DiffuseColor>
<physm:X>0.1</physm:X>
<physm:Y>0.1</physm:Y>
<physm:Z>0.1</physm:Z>
<physm:W>1</physm:W>
</phys:DiffuseColor>
<phys:EnableContactNotifications>true</phys:EnableContactNotifications>
</phys:BoxState>
</BoxShape>
<BoxShape>
<phys:BoxState>
<phys:Name>/P3DXBumpers/rear</phys:Name>
<phys:ShapeId>Box</phys:ShapeId>
<phys:Dimensions>
<physm:X>0.4</physm:X>
<physm:Y>0.03</physm:Y>
<physm:Z>0.03</physm:Z>
</phys:Dimensions>
<phys:Radius>0</phys:Radius>
<phys:MassDensity>
<phys:Mass>0.001</phys:Mass>
<phys:InertiaTensor>
<physm:X>0</physm:X>
<physm:Y>0</physm:Y>
<physm:Z>0</physm:Z>
</phys:InertiaTensor>
<phys:CenterOfMass>
<physm:Position>
<physm:X>0</physm:X>
<physm:Y>0</physm:Y>
<physm:Z>0</physm:Z>
</physm:Position>
<physm:Orientation>
<physm:X>0</physm:X>
<physm:Y>0</physm:Y>
<physm:Z>0</physm:Z>
<physm:W>0</physm:W>
</physm:Orientation>
</phys:CenterOfMass>
<phys:Density>0</phys:Density>
<phys:LinearDamping>0</phys:LinearDamping>
<phys:AngularDamping>0</phys:AngularDamping>
<phys:MassLocalPose>
<physm:Position>
<physm:X>0</physm:X>
<physm:Y>0</physm:Y>
<physm:Z>0</physm:Z>
</physm:Position>
<physm:Orientation>
<physm:X>0</physm:X>
<physm:Y>0</physm:Y>
<physm:Z>0</physm:Z>
<physm:W>0</physm:W>
</physm:Orientation>
</phys:MassLocalPose>
</phys:MassDensity>
<phys:LocalPose>
<physm:Position>
<physm:X>0</physm:X>
<physm:Y>0.05</physm:Y>
<physm:Z>0.25</physm:Z>
</physm:Position>
<physm:Orientation>
<physm:X>0</physm:X>
<physm:Y>0</physm:Y>
<physm:Z>0</physm:Z>
<physm:W>1</physm:W>
</physm:Orientation>
</phys:LocalPose>
<phys:TextureFileName />
<phys:DiffuseColor>
<physm:X>0.1</physm:X>
<physm:Y>0.1</physm:Y>
<physm:Z>0.1</physm:Z>
<physm:W>1</physm:W>
</phys:DiffuseColor>
<phys:EnableContactNotifications>true</phys:EnableContactNotifications>
</phys:BoxState>
</BoxShape>
</Shapes>
</BumperArrayEntity>
<CameraEntity xmlns:sim="http://schemas.microsoft.com/robotics/2006/04/simulation.html" xmlns:physm="http://schemas.microsoft.com/robotics/2006/07/physicalmodel.html" xmlns:phys="http://schemas.microsoft.com/robotics/2006/04/simulation/physics.html" xmlns="http://schemas.microsoft.com/robotics/2006/04/simulationengine.html">
<sim:State>
<sim:Name>robocam</sim:Name>
<sim:Assets>
<sim:Effect>default</sim:Effect>
</sim:Assets>
<sim:Pose>
<physm:Position>
<physm:X>0</physm:X>
<physm:Y>0.5</physm:Y>
<physm:Z>0</physm:Z>
</physm:Position>
<physm:Orientation>
<physm:X>0</physm:X>
<physm:Y>0</physm:Y>
<physm:Z>0</physm:Z>
<physm:W>1</physm:W>
</physm:Orientation>
</sim:Pose>
<sim:Velocity>
<physm:X>0</physm:X>
<physm:Y>0</physm:Y>
<physm:Z>0</physm:Z>
</sim:Velocity>
<sim:AngularVelocity>
<physm:X>0</physm:X>
<physm:Y>0</physm:Y>
<physm:Z>0</physm:Z>
</sim:AngularVelocity>
<sim:MassDensity>
<phys:Mass>1</phys:Mass>
<phys:InertiaTensor>
<physm:X>0</physm:X>
<physm:Y>0</physm:Y>
<physm:Z>0</physm:Z>
</phys:InertiaTensor>
<phys:CenterOfMass>
<physm:Position>
<physm:X>0</physm:X>
<physm:Y>0</physm:Y>
<physm:Z>0</physm:Z>
</physm:Position>
<physm:Orientation>
<physm:X>0</physm:X>
<physm:Y>0</physm:Y>
<physm:Z>0</physm:Z>
<physm:W>0</physm:W>
</physm:Orientation>
</phys:CenterOfMass>
<phys:Density>0</phys:Density>
<phys:LinearDamping>0</phys:LinearDamping>
<phys:AngularDamping>0</phys:AngularDamping>
<phys:MassLocalPose>
<physm:Position>
<physm:X>0</physm:X>
<physm:Y>0</physm:Y>
<physm:Z>0</physm:Z>
</physm:Position>
<physm:Orientation>
<physm:X>0</physm:X>
<physm:Y>0</physm:Y>
<physm:Z>0</physm:Z>
<physm:W>0</physm:W>
</physm:Orientation>
</phys:MassLocalPose>
</sim:MassDensity>
<sim:Flags>Dynamic</sim:Flags>
</sim:State>
<Flags>None</Flags>
<ChildCount>0</ChildCount>
<ReferenceFrame>NotSet</ReferenceFrame>
<ServiceContract>http://schemas.microsoft.com/2006/09/simulatedwebcam.html</ServiceContract>
<EmbeddedResourceAssemblies />
<MeshScale>
<physm:X>1</physm:X>
<physm:Y>1</physm:Y>
<physm:Z>1</physm:Z>
</MeshScale>
<MeshRotation>
<physm:X>0</physm:X>
<physm:Y>0</physm:Y>
<physm:Z>0</physm:Z>
</MeshRotation>
<MeshTranslation>
<physm:X>0</physm:X>
<physm:Y>0</physm:Y>
<physm:Z>0</physm:Z>
</MeshTranslation>
<IsRealTimeCamera>true</IsRealTimeCamera>
<UpdateInterval>50</UpdateInterval>
<ShadowDisplay>ShowShadows</ShadowDisplay>
<CameraModel>AttachedChild</CameraModel>
<Near>0</Near>
<Far>0</Far>
<ViewSizeX>320</ViewSizeX>
<ViewSizeY>240</ViewSizeY>
<ViewAngle>0.7853982</ViewAngle>
<IsPhysicsVisible>false</IsPhysicsVisible>
<LookAt>
<X>0</X>
<Y>0</Y>
<Z>1</Z>
</LookAt>
<Location>
<X>0</X>
<Y>0</Y>
<Z>0</Z>
</Location>
</CameraEntity>
<KinectBaseEntity xmlns:sim="http://schemas.microsoft.com/robotics/2006/04/simulation.html" xmlns:physm="http://schemas.microsoft.com/robotics/2006/07/physicalmodel.html" xmlns:phys="http://schemas.microsoft.com/robotics/2006/04/simulation/physics.html" xmlns="http://schemas.microsoft.com/robotics/simulation/services/2011/01/simulateddepthcam.html">
<sim:State>
<sim:Name>KinectBase</sim:Name>
<sim:Assets>
<sim:Mesh>kinectbase.obj</sim:Mesh>
</sim:Assets>
<sim:Pose>
<physm:Position>
<physm:X>1.999773</physm:X>
<physm:Y>0.5</physm:Y>
<physm:Z>2.00281787</physm:Z>
</physm:Position>
<physm:Orientation>
<physm:X>7.98663241E-05</physm:X>
<physm:Y>-0.0007520462</physm:Y>
<physm:Z>8.008059E-05</physm:Z>
<physm:W>0.999999762</physm:W>
</physm:Orientation>
</sim:Pose>
<sim:Velocity>
<physm:X>0.0002449537</physm:X>
<physm:Y>-6.49874528E-06</physm:Y>
<physm:Z>5.659733E-06</physm:Z>
</sim:Velocity>
<sim:AngularVelocity>
<physm:X>-0.00132568076</physm:X>
<physm:Y>-0.00055813574</physm:Y>
<physm:Z>-0.00496417144</physm:Z>
</sim:AngularVelocity>
<sim:MassDensity>
<phys:Mass>0.1</phys:Mass>
<phys:InertiaTensor>
以上是关于浅谈机器人控制与仿真设计----RDS和ROS的主要内容,如果未能解决你的问题,请参考以下文章