国科大人工智能学院《计算机视觉》课 —三维视觉—立体视觉与三维建模
Posted 鱼米粒
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了国科大人工智能学院《计算机视觉》课 —三维视觉—立体视觉与三维建模相关的知识,希望对你有一定的参考价值。
稠密点云 重建
一、先验知识
1. 图像的获取方式:室内环境、室外环境、网络图片
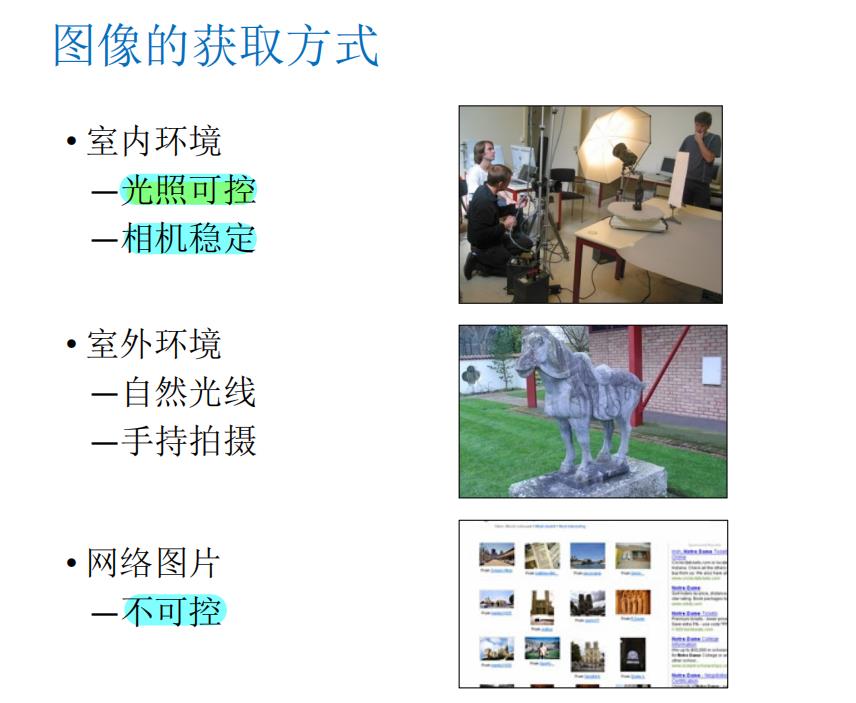
室外环境:
- 要求:光线均匀(防止过爆、失爆)
- 阴天多云是最好的。
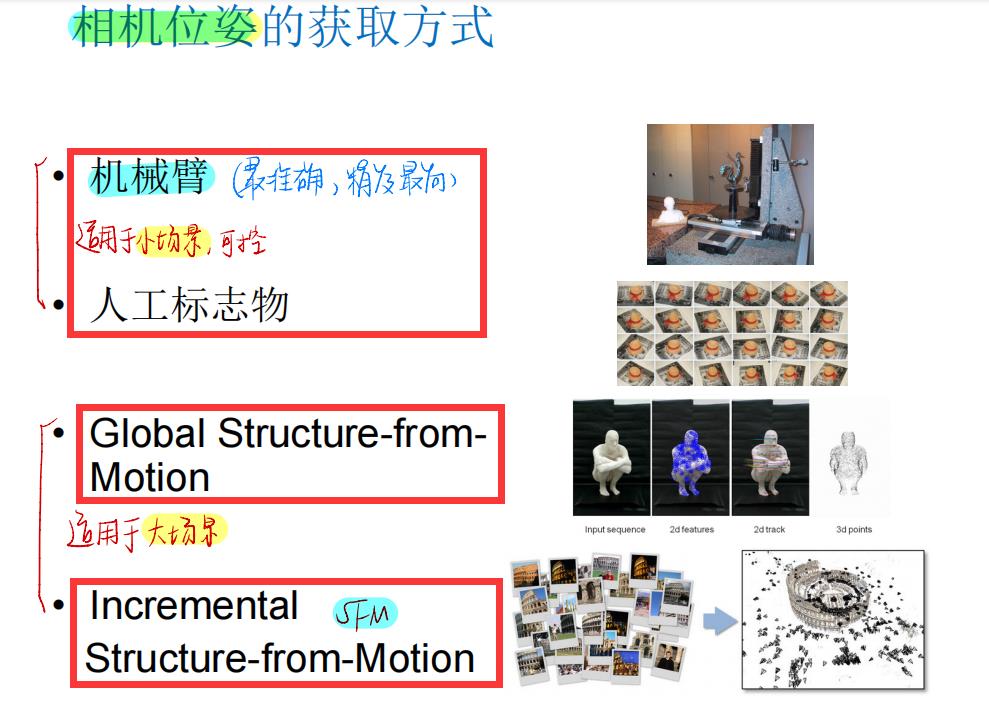
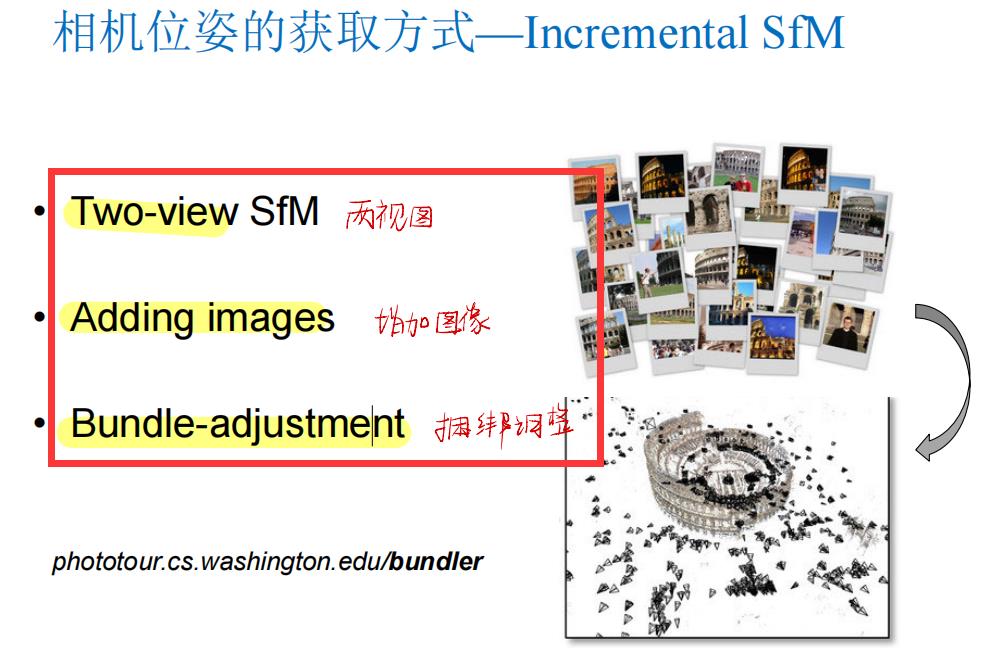
2. 相机位姿的获取方式
二、三维建模
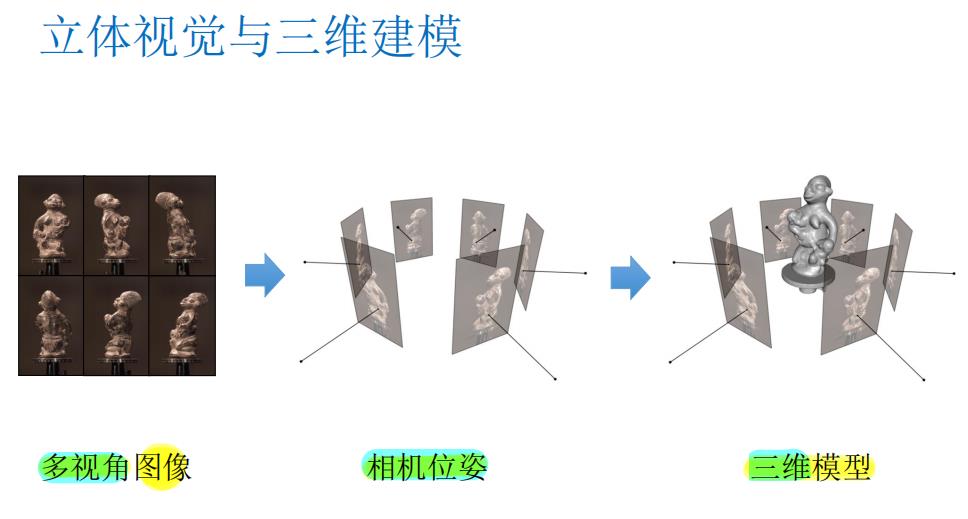
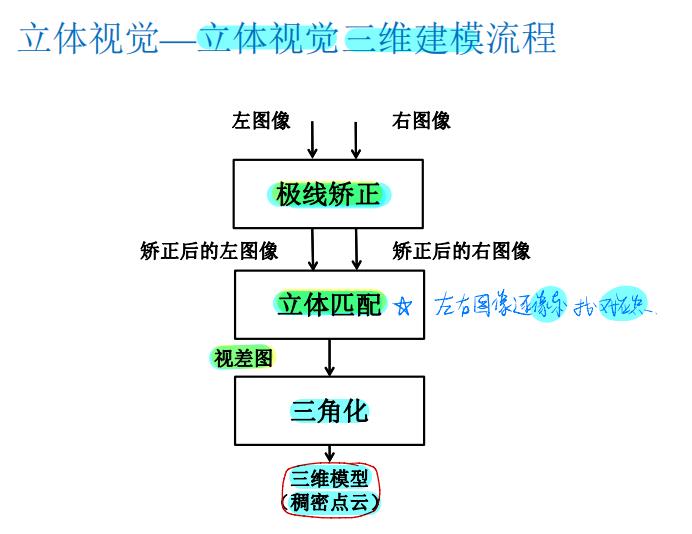
1. 三维建模的基本流程
2. 立体视觉:两视图三维建模
人判断远近:物体在水平方向的位移。位移大,离得近。
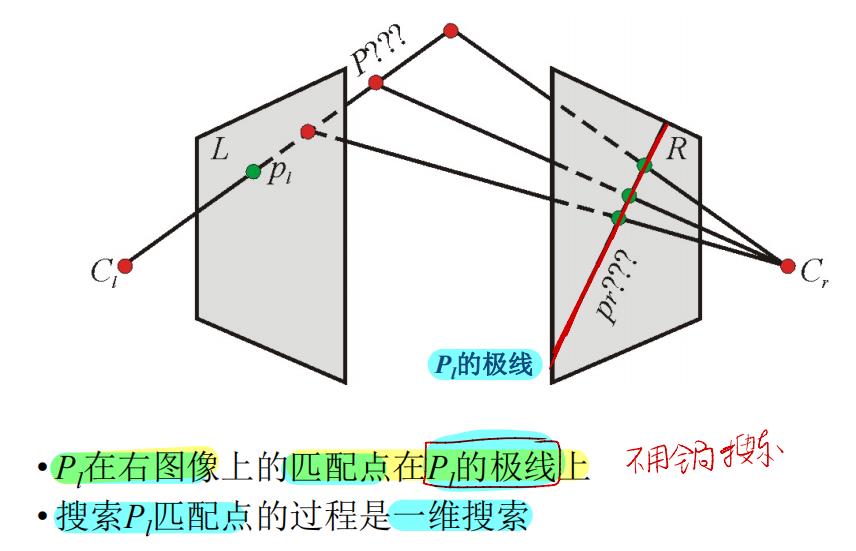
极几何:两视图的极几何约束
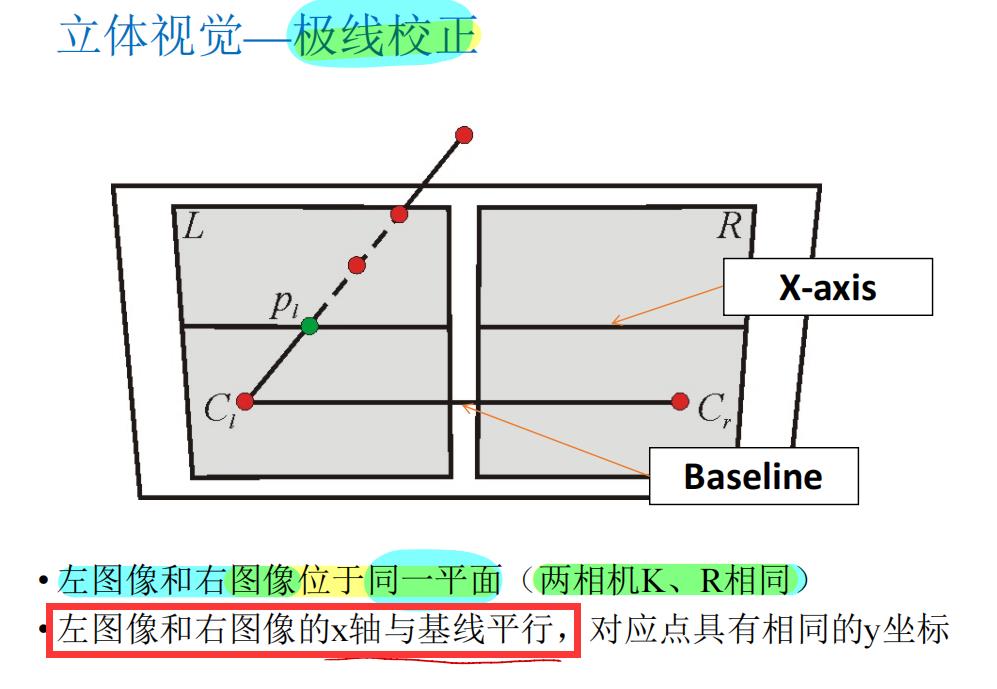
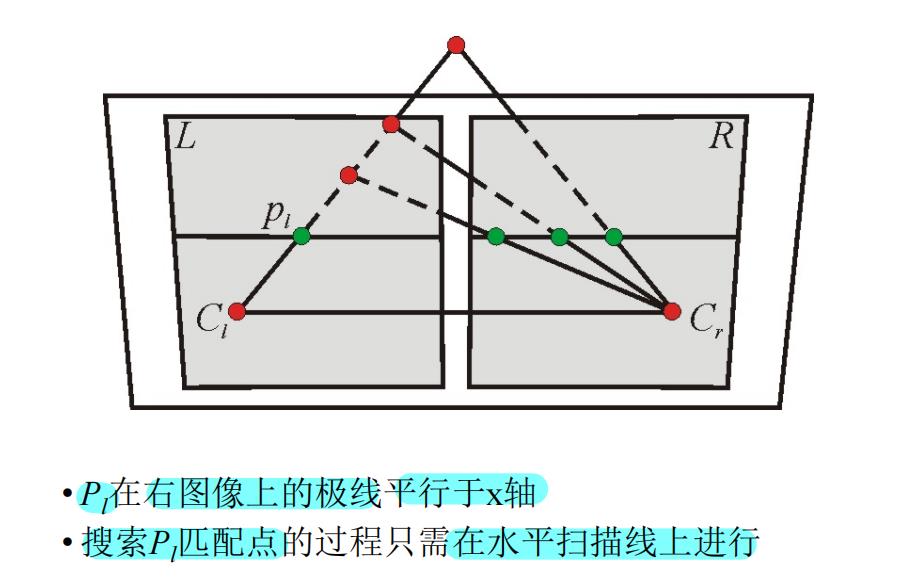
极线矫正:
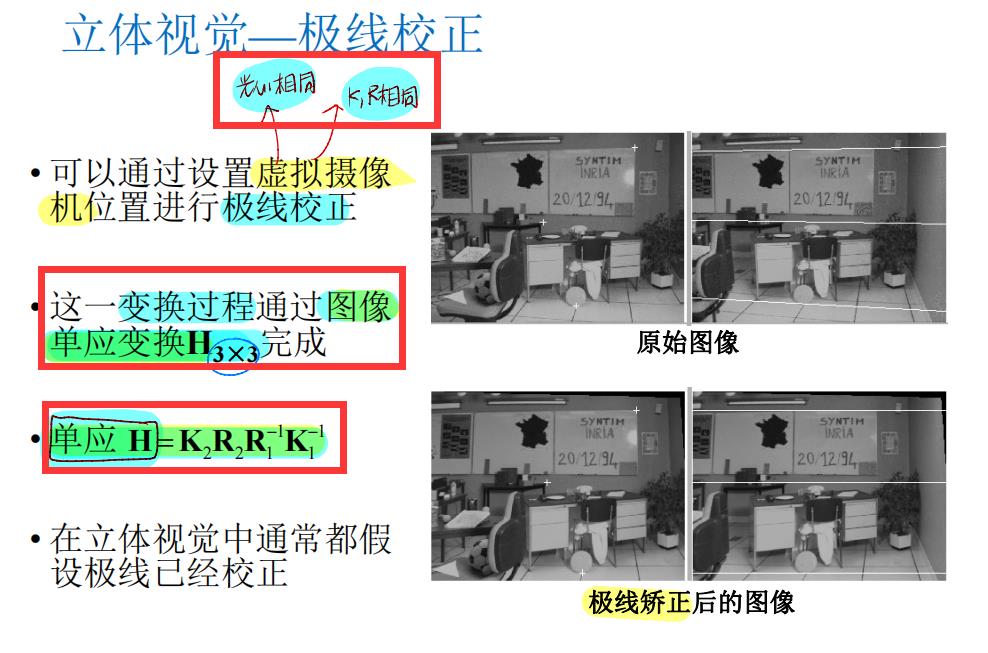
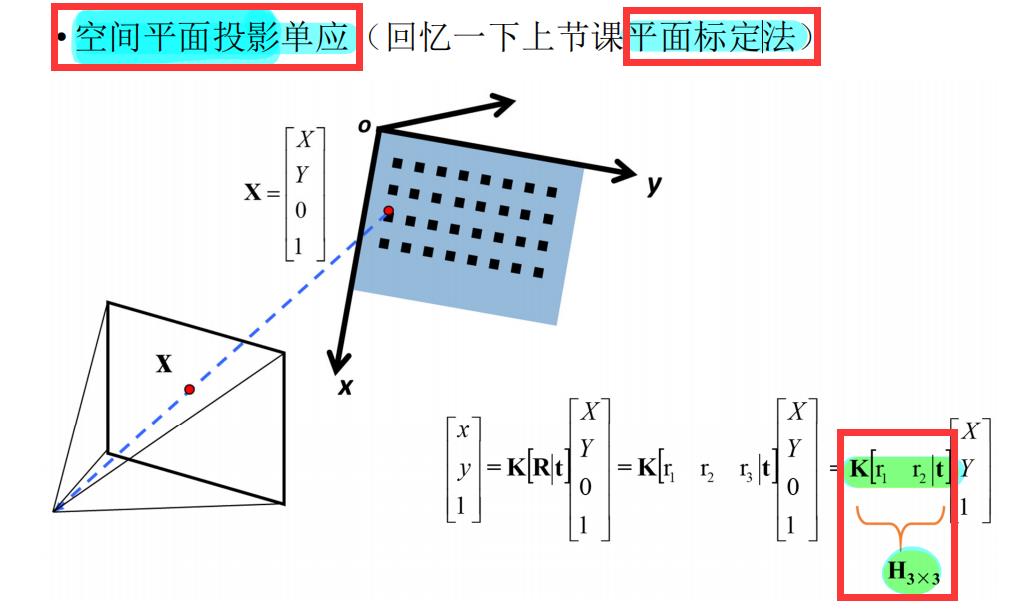
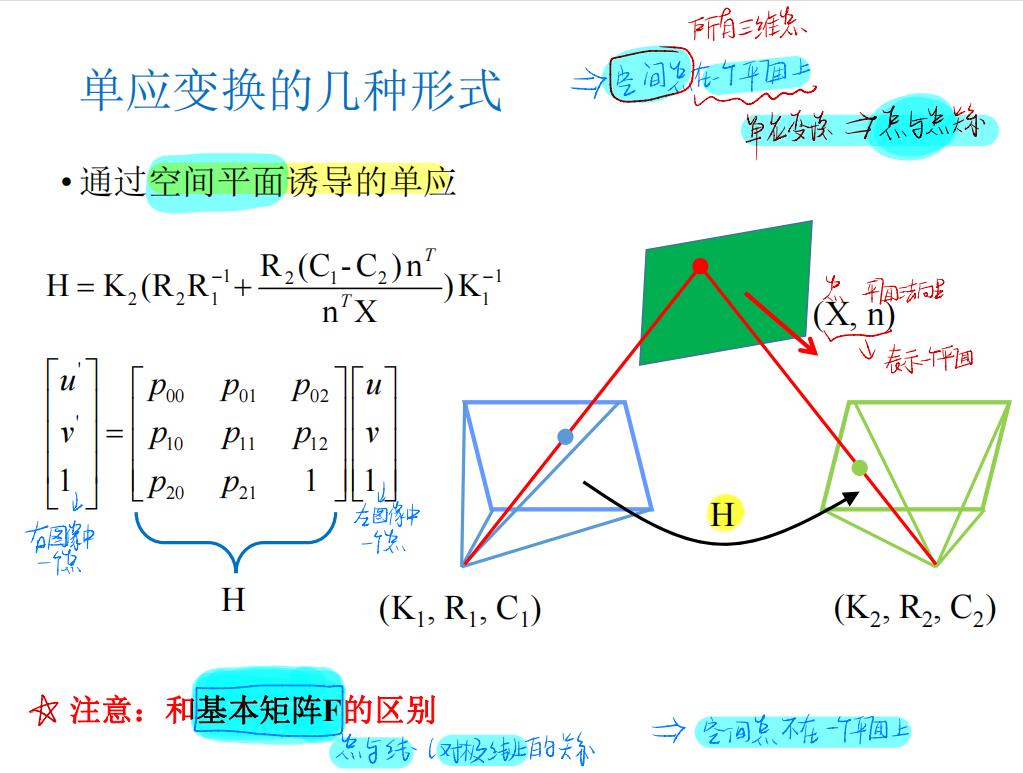
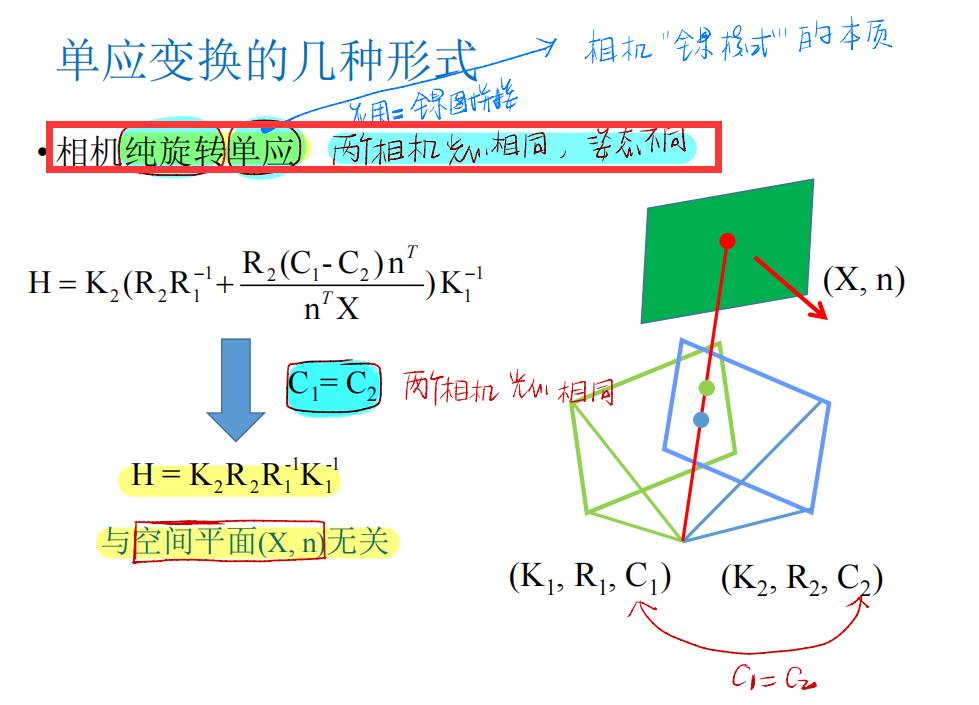
单应变换的几种形式(很重要):空间平面投影单应、通过空间平面诱导的单应、相机纯旋转单应
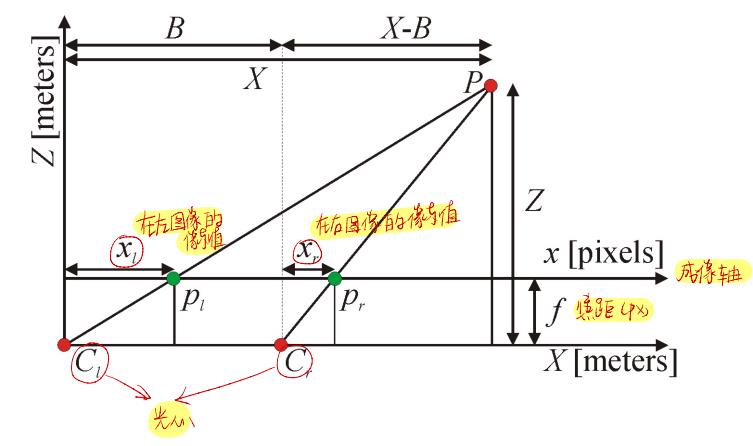
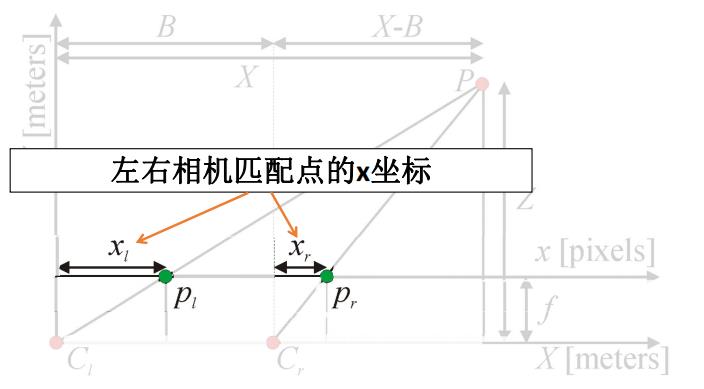
视差:
- 极线矫正后,左右图像的一对匹配点在x轴上坐标的差异 称为 视差(Disparity)
- 视差的大小与点距离相机距离的远近成反比
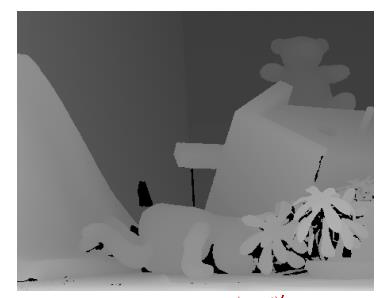
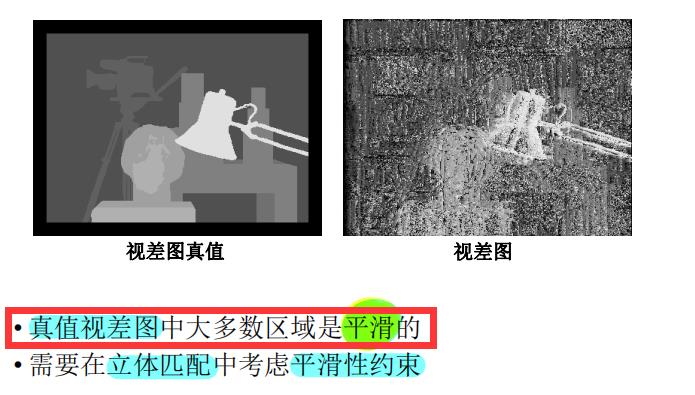
视差图:
- 立体视觉的目的就是通过左右图像计算(稠密)视差图
- 视差图是一幅灰度图像,像素点的值表示这一点的视差大小,灰度值越高表示视差越大(距离越近)
- 通过视差图可以得到单视点下的三维模型(稠密点云)

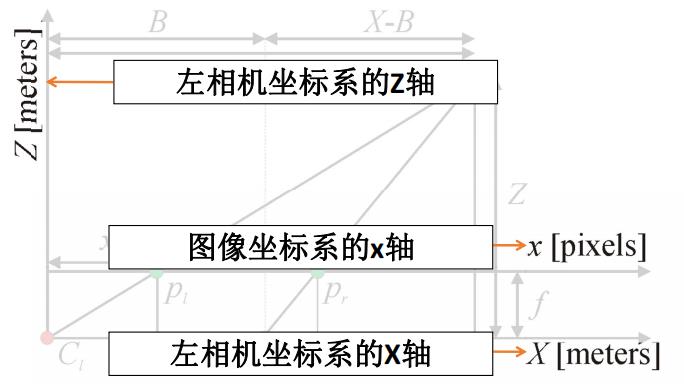
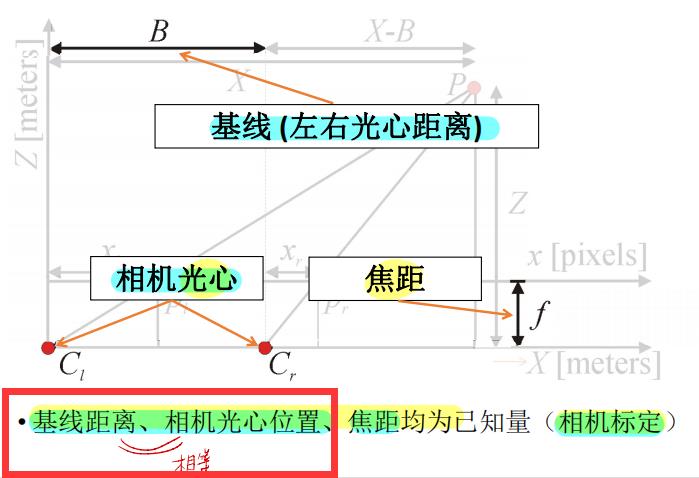
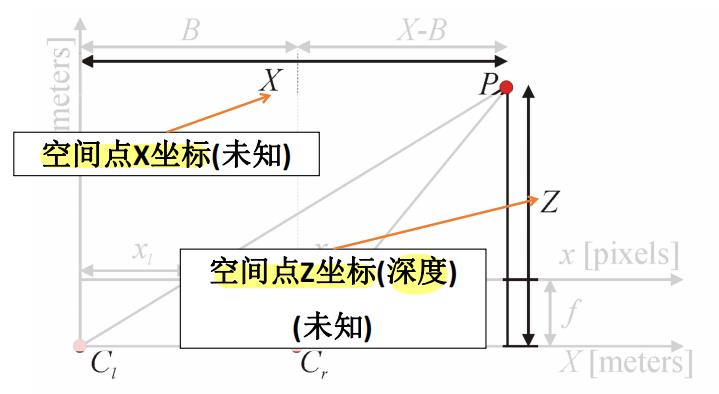
视差与深度:
深度Z = (B * f) / (xl - xr) = (基线 * 焦距) / 视差
3. 三维建模的基本流程(续)
4. 立体匹配:单点匹配法、窗口匹配法、自适应窗口匹配法、自适应权值窗口匹配法
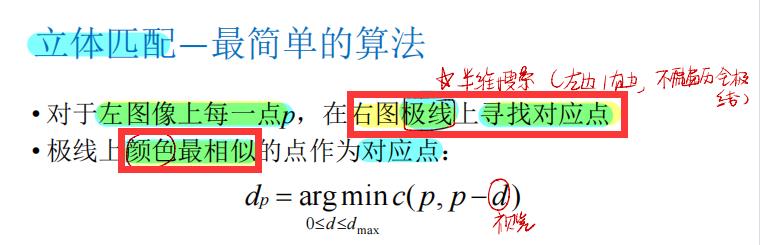
但对于左图像上点p,右图极线上有很多颜色类似的点。仅靠单点颜色比较容易出现错误(噪声太多)
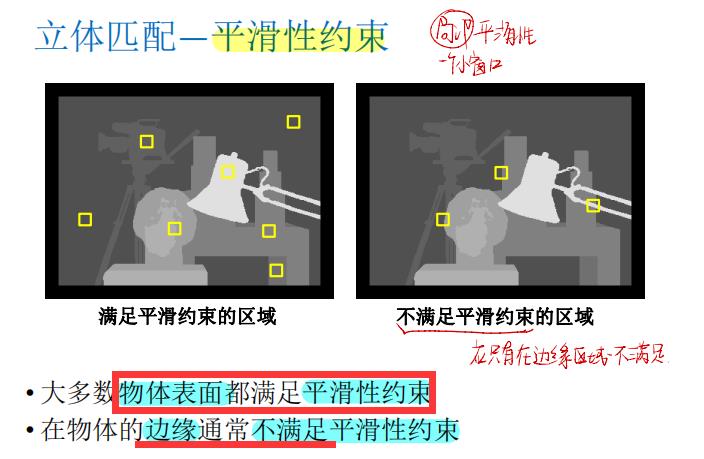
所以考虑 平滑性约束
所以形成了 窗口匹配法。

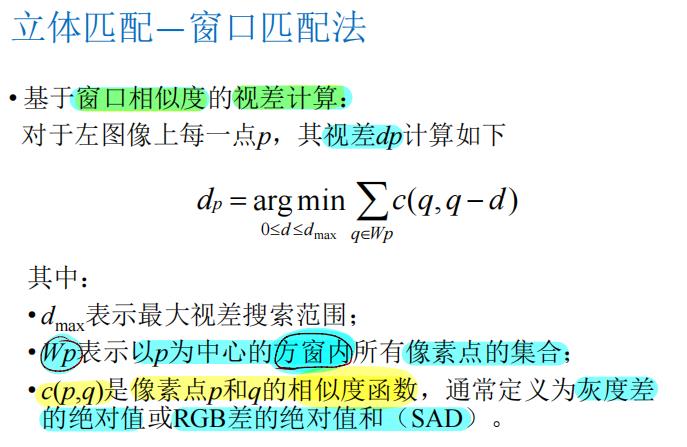
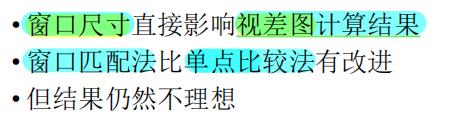
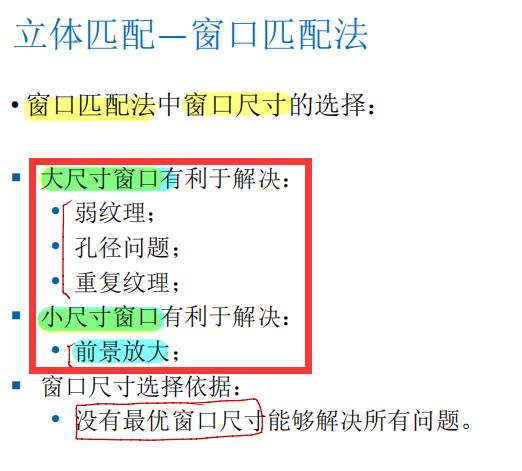
影响窗口匹配结果的因素:
- 弱纹理:弱纹理区域窗口内像素值类似,相邻区域的相似度函数值差异不显著
- 孔径问题:窗口包含的纹理区域太小,区分度不足
- 重复纹理:重复纹理区域窗口内像素值类似,容易产生匹配误差
- 前景放大:由于立体匹配中容易存在遮挡问题,所以在边缘(有视差跳变,同时有前景和背景)处背景容易被错分为前景,造成前景放大。前景放大效应造成视差图中前景物体比实际大。
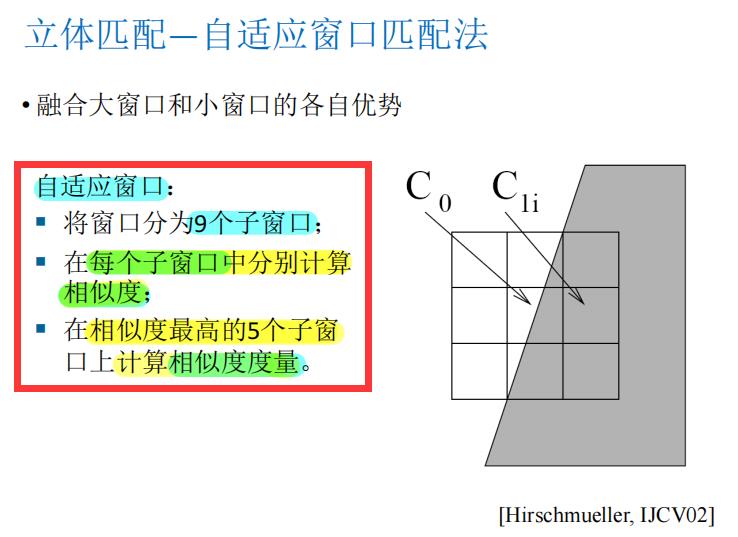
自适应窗口匹配法:融合大窗口和小窗口的各自优势,可有效改进边缘区域的视差
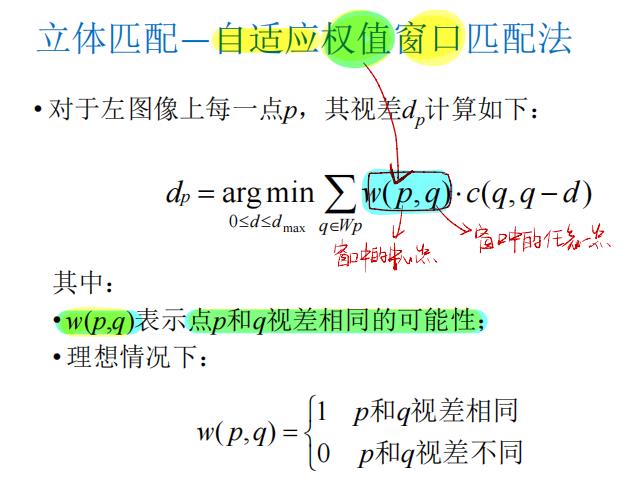
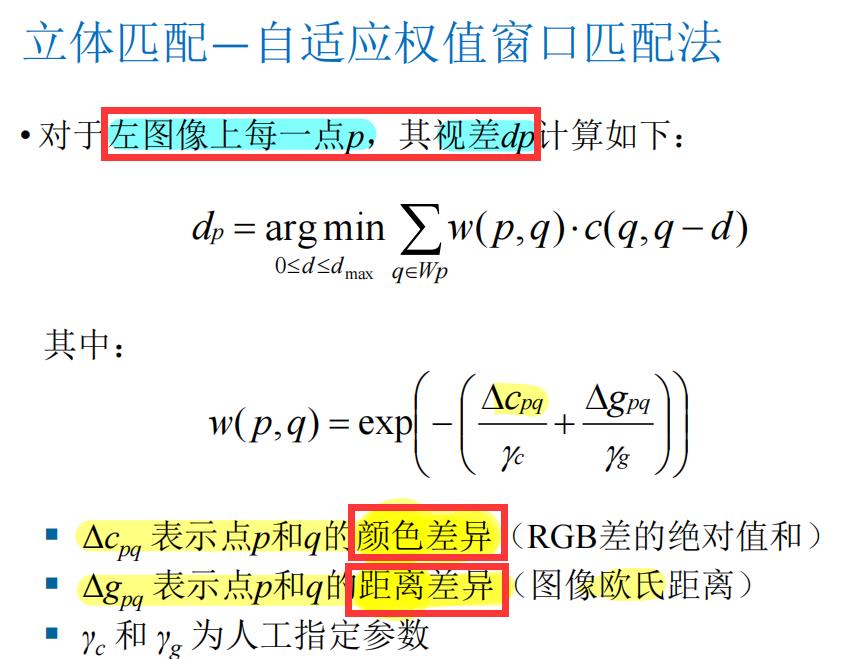
自适应权值窗口匹配法:
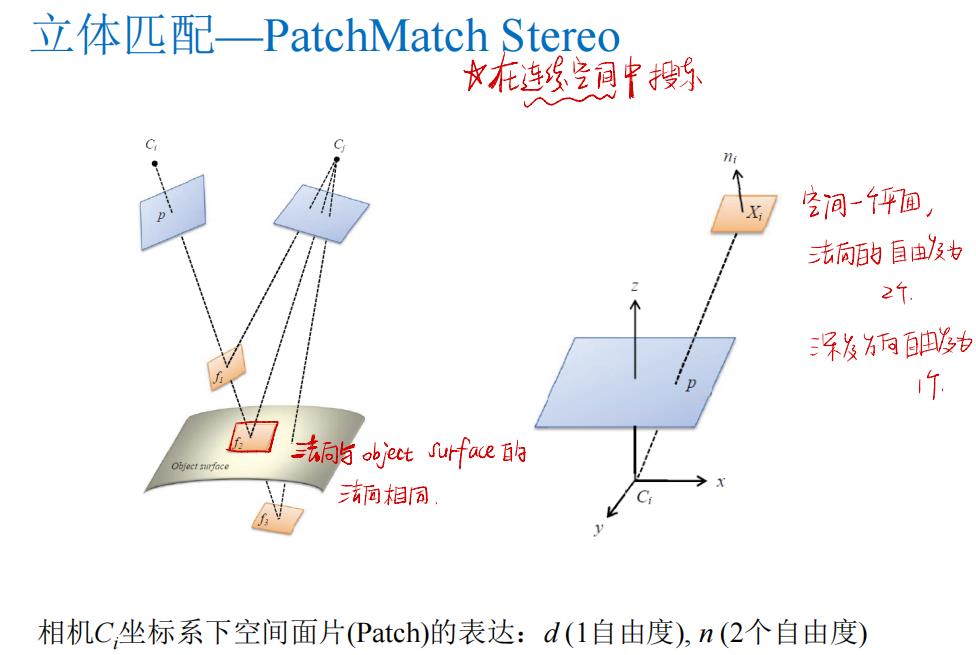
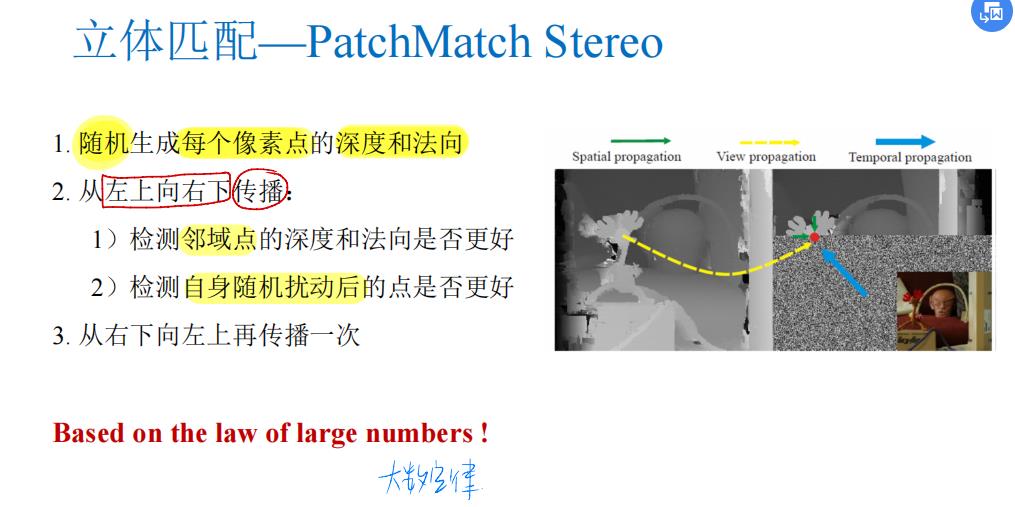
三、立体匹配 — PatchMatch Stereo

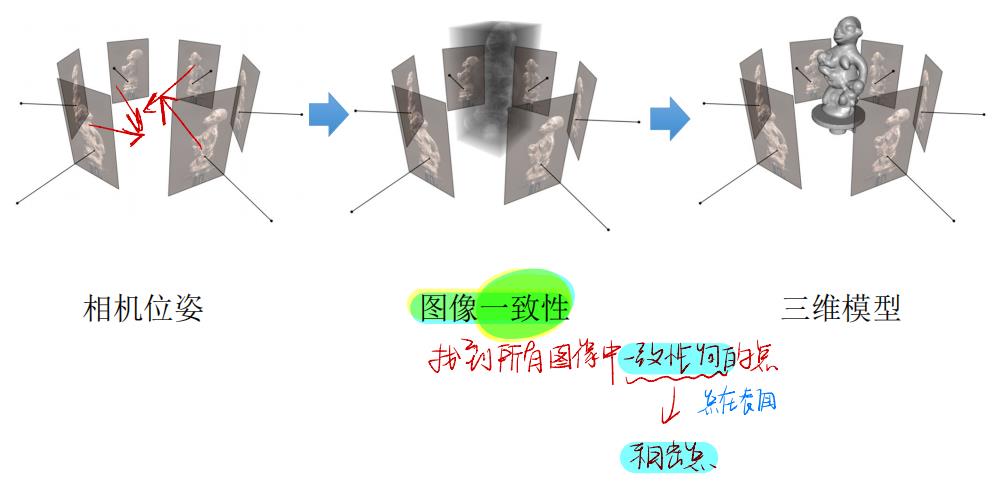
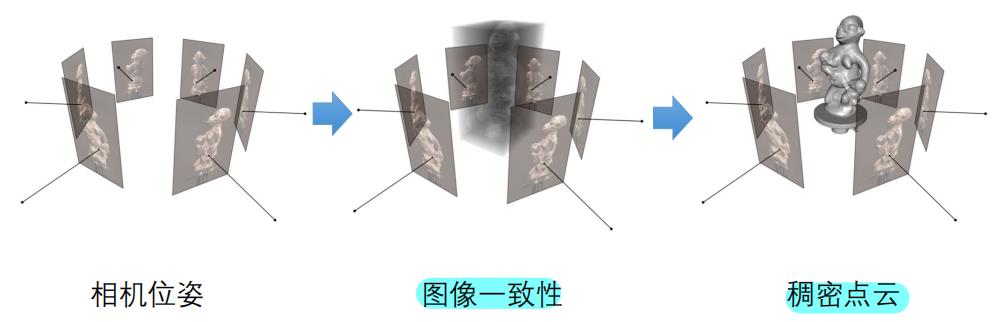
四、MVS(Multiple View Stereo)多视图立体视觉
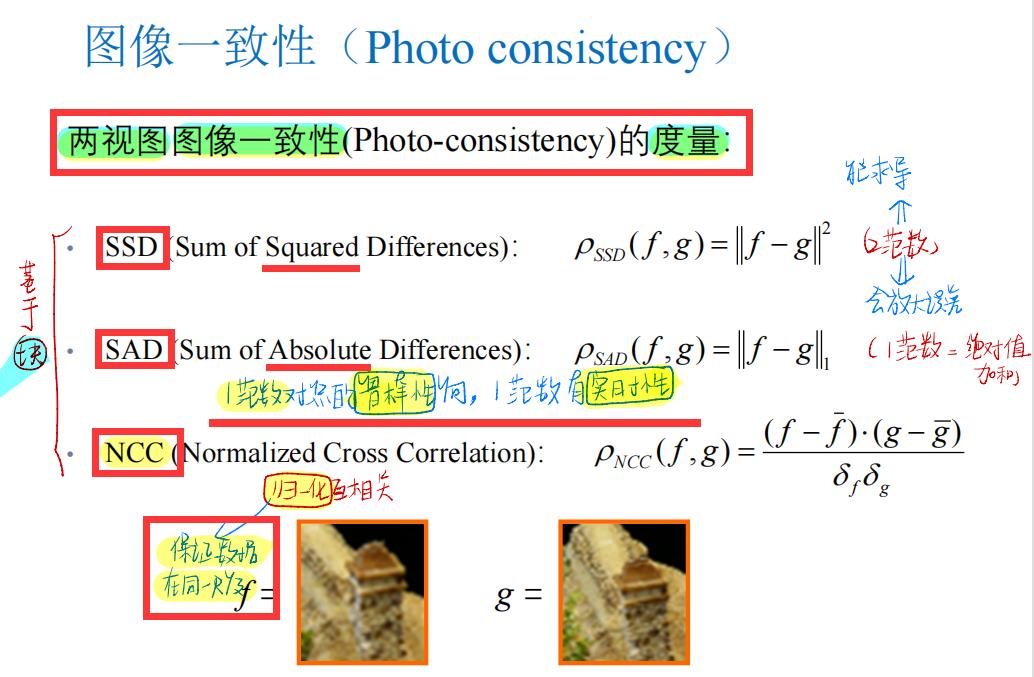
1. MVS基本思路:寻找空间中具有图像一致性的点
2. MVS算法的分类:深度图融合、体素、点云扩散、CNN
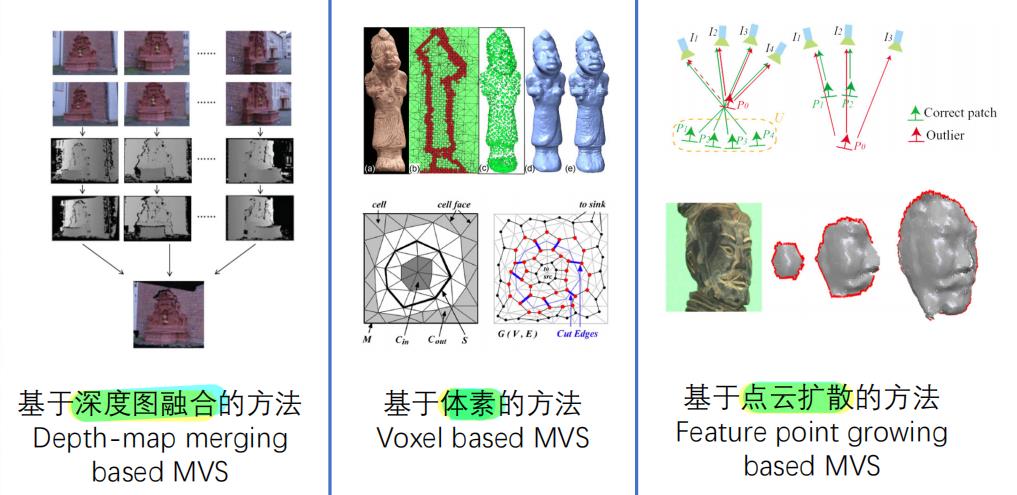
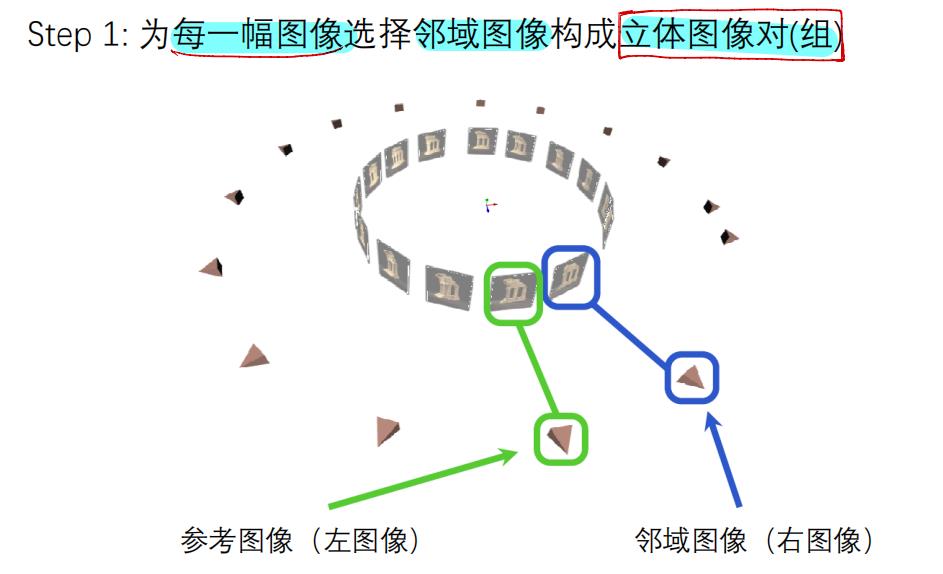
深度图融合:



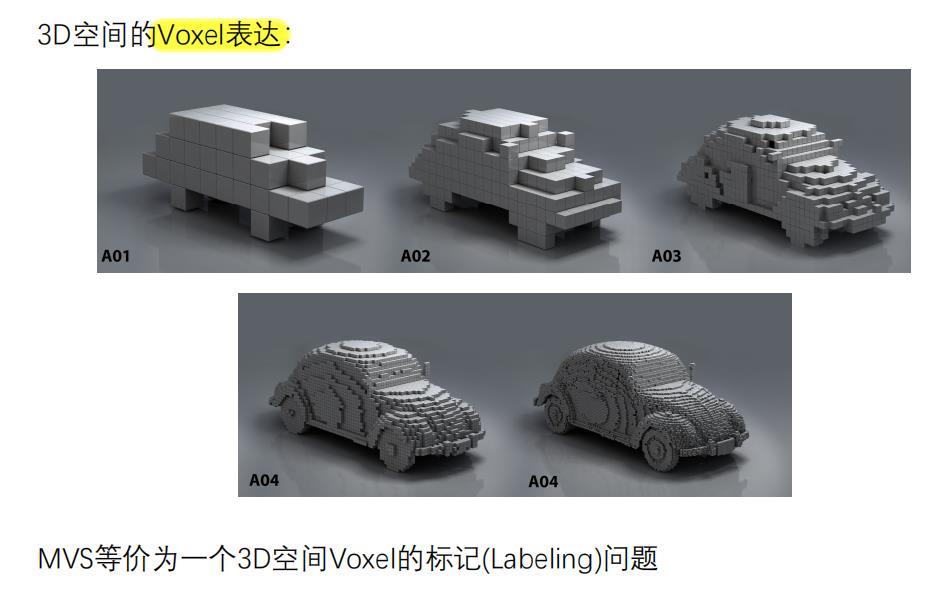
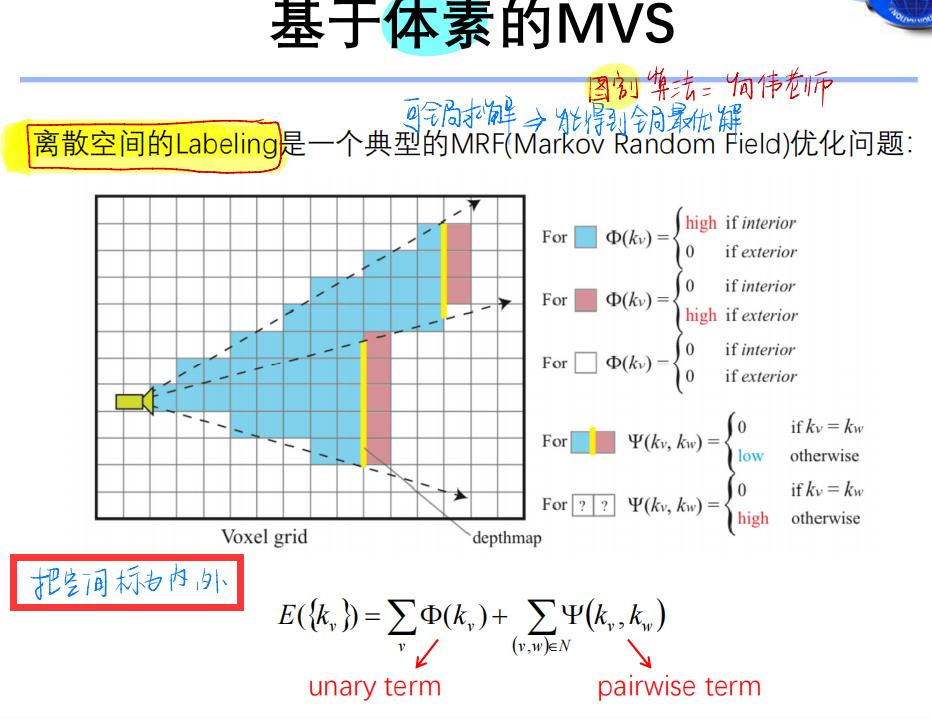
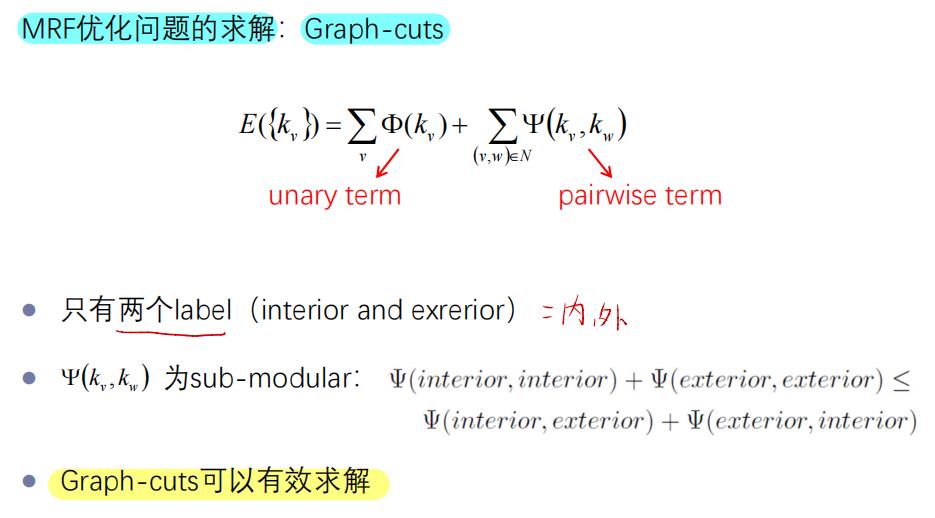
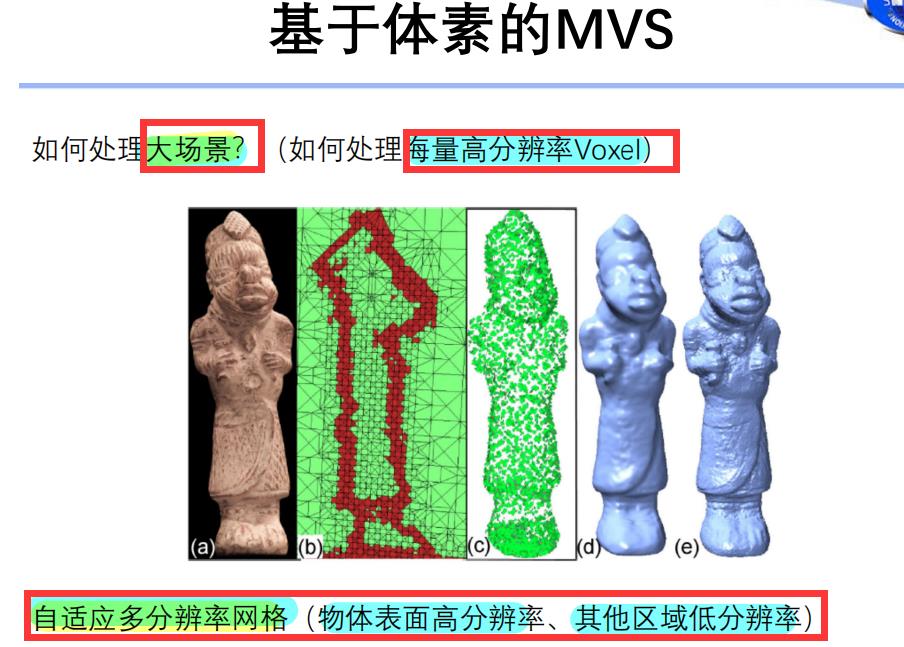
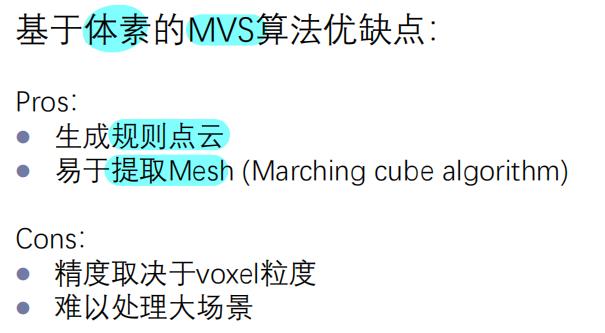
基于体素的MVS:
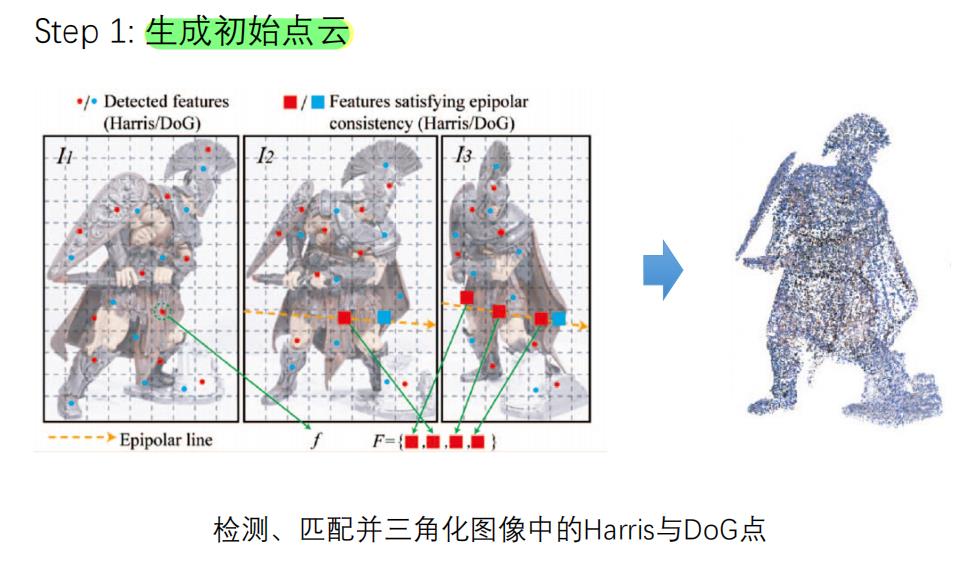
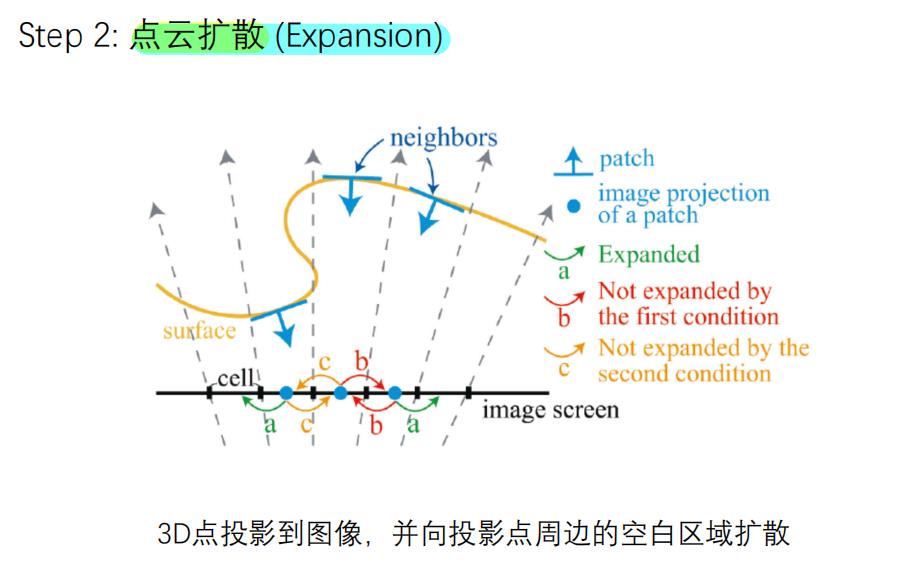
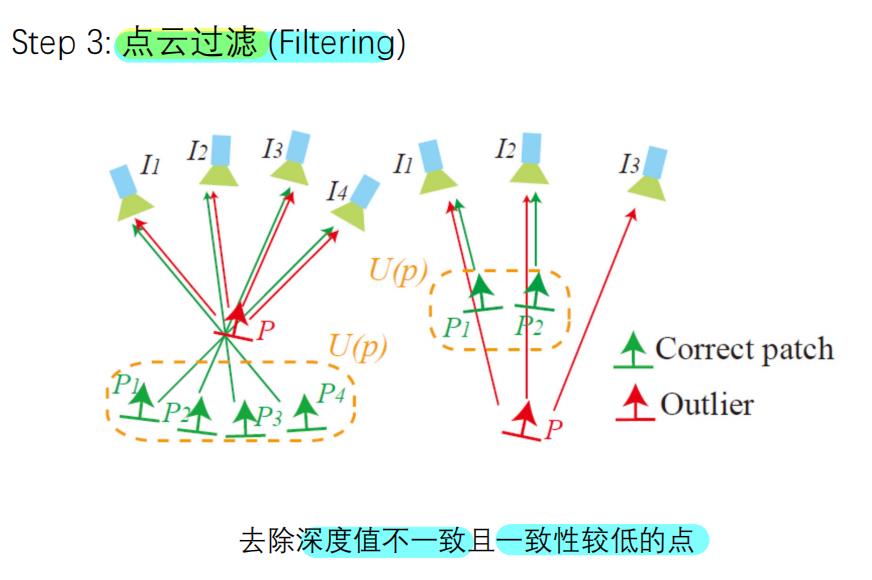
基于特征点扩散的MVS:
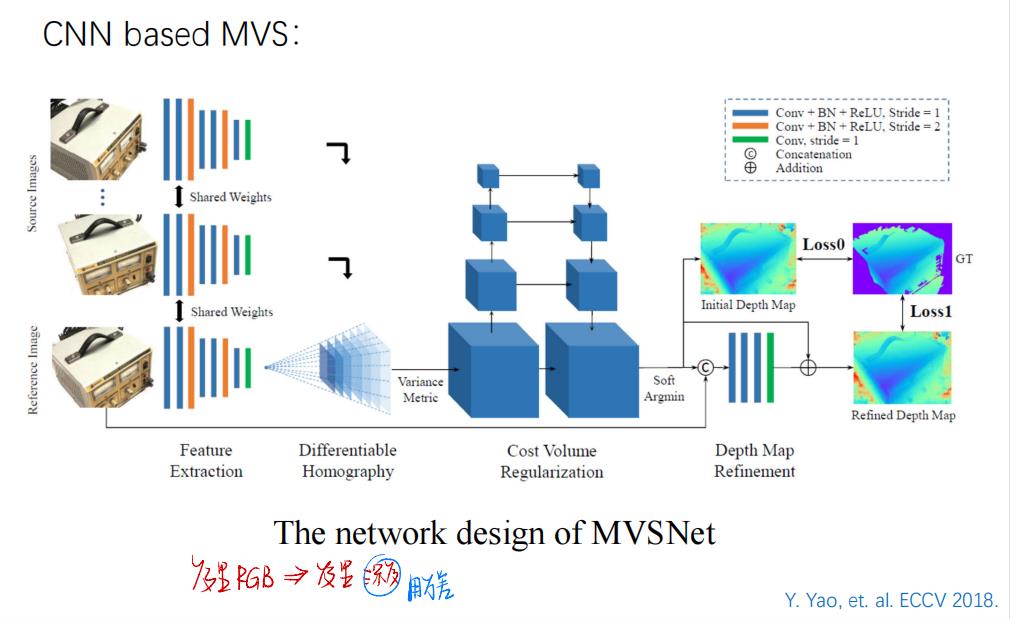
基于CNN端到端的MVS:
以上是关于国科大人工智能学院《计算机视觉》课 —三维视觉—立体视觉与三维建模的主要内容,如果未能解决你的问题,请参考以下文章
国科大人工智能学院《计算机视觉》课 —三维视觉—立体视觉与三维建模
国科大人工智能学院《计算机视觉》课 —三维视觉—三维表达与语义建模
国科大人工智能学院《计算机视觉》课 —三维视觉—三维表达与语义建模
国科大人工智能学院《计算机视觉》课 —三维视觉—三维表达与语义建模