国科大人工智能学院《计算机视觉》课 —三维视觉—相机模型与多视几何
Posted 鱼米粒
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了国科大人工智能学院《计算机视觉》课 —三维视觉—相机模型与多视几何相关的知识,希望对你有一定的参考价值。
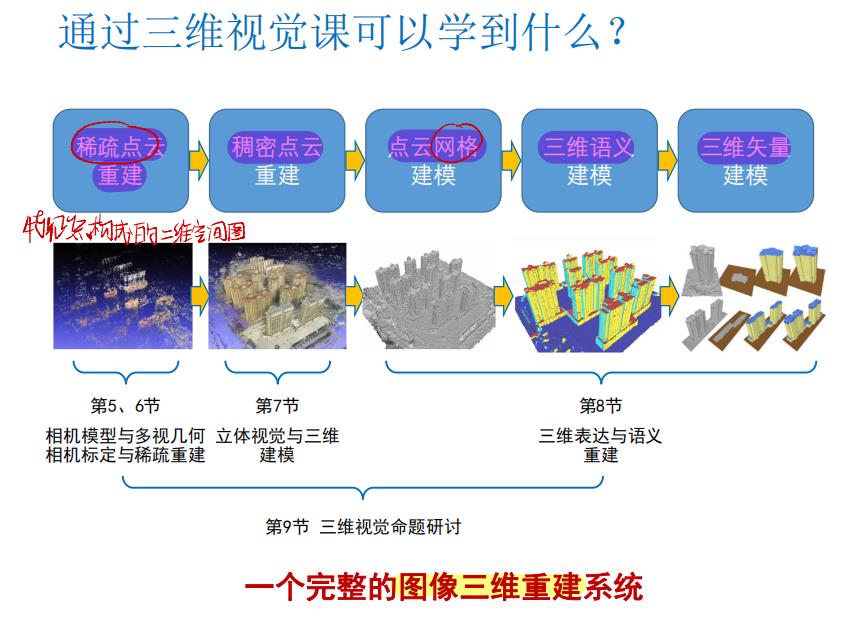
零、三维计算机视觉 涉及的知识
- 相机模型与多视几何
- 相机标定与稀疏重建
- 立体视觉与三维建模
- 三维表达与语义重建


一、相机成像:三维 —> 二维
1. 小孔成像
屏障上的“小孔”称为“光圈Aperture”
- 小光圈:曝光时间增长,高亮度图像
- 大光圈:曝光时间短,模糊图像
- 光圈变小:图像先变清晰,再变模糊
- 因为光圈过小,会产生衍射现象,导致图像模糊
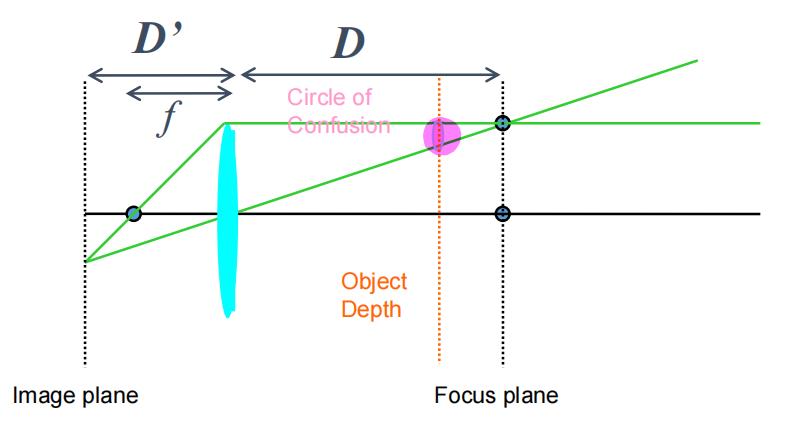
2. 透镜系统
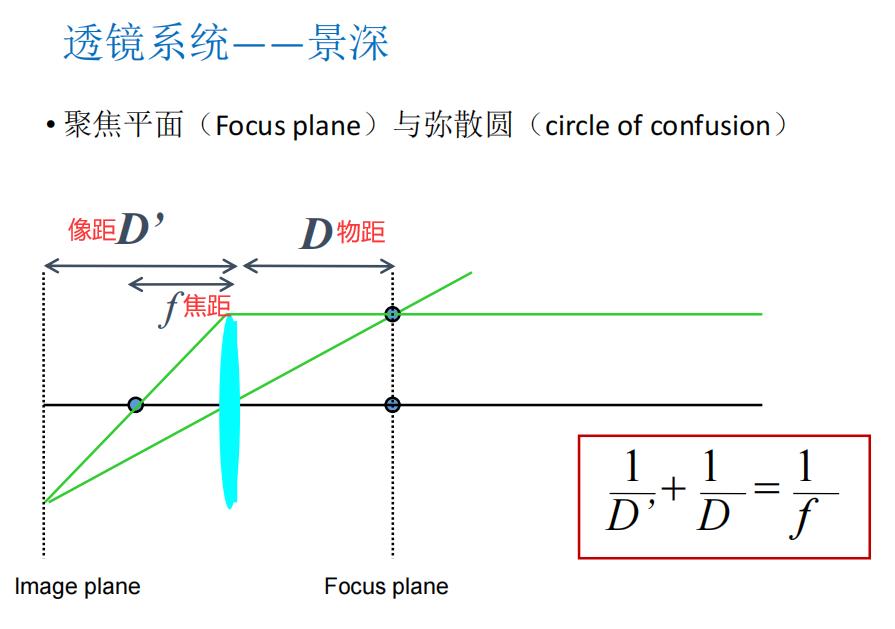
- 景深:清晰成像的范围
- 弥散圆:在平面上成的像会成为有一定直径的圆

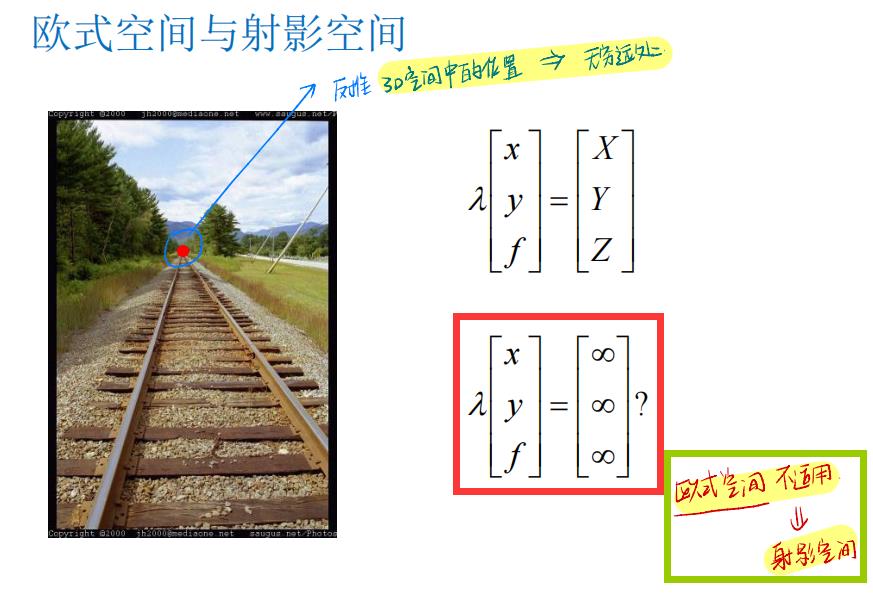
3. 欧式空间和射影空间

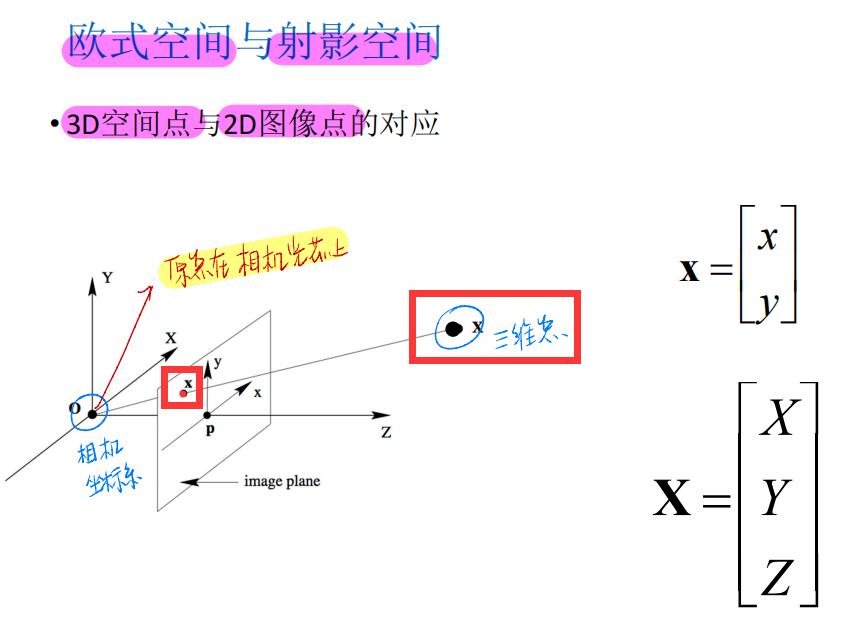
三维空间点 与 二维图像点 对应:

但欧式空间中对于三维空间中无穷远处的点无法表达:
所以射影空间为:把无穷远处的元素包含进来
- 欧式空间:存在无穷远的概念,但是不参与计算
- 射影空间:对n维欧式空间加入无穷远元素,并对有限元素和无穷远元素不加以区分。
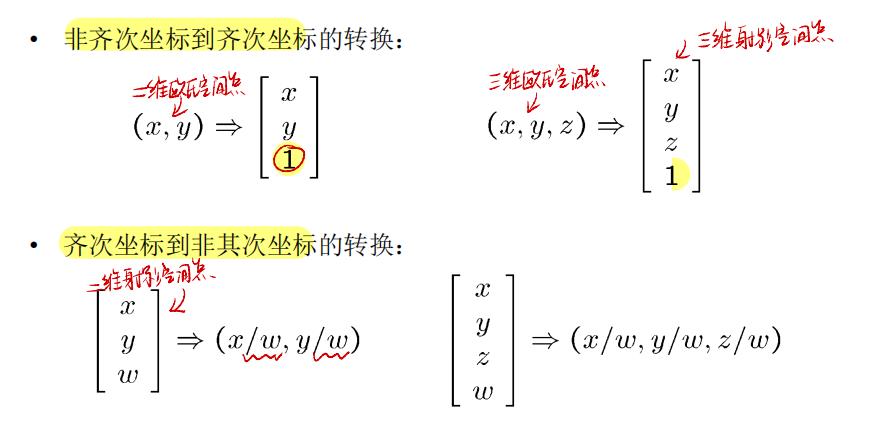
4. 齐次坐标:齐次坐标是 射影空间 的坐标表达方式

二、相机模型
1. 坐标系:相机坐标系、世界坐标系

2. 坐标变换

相机位姿R和t 是相对于 世界坐标系 而言的。
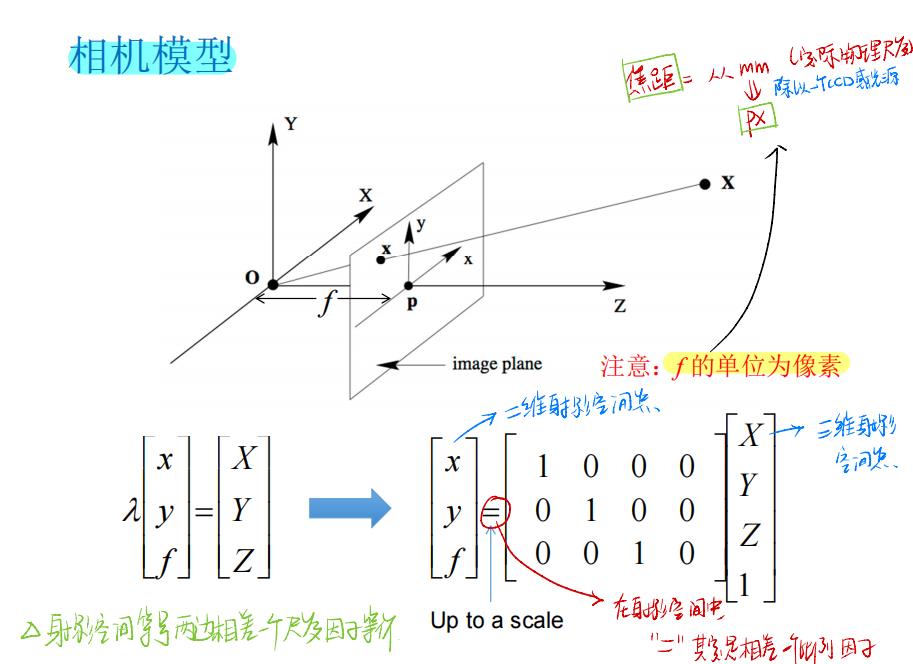
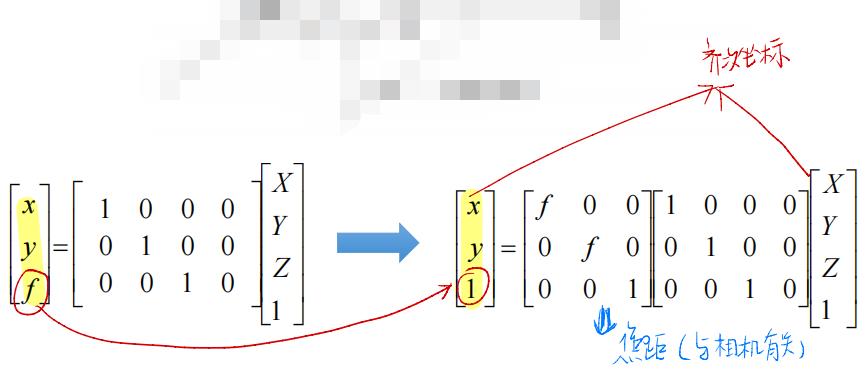
3. 相机模型


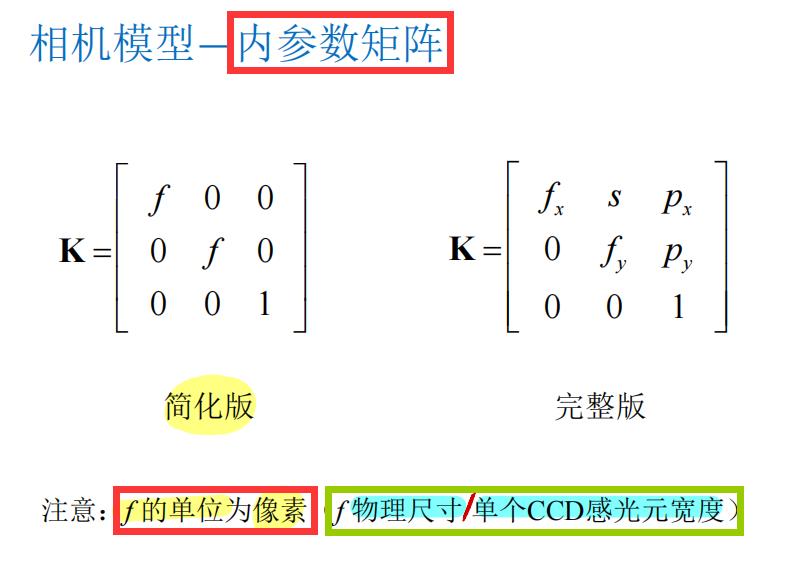
4. 镜头畸变

三、多视(多个不同视角的图像)几何



1. 两视图几何
极平面epipolar plane 将 三维点、二维点、相机 结合。(将已知量与未知量约束。)

2. 基本矩阵F
用数学方式来刻画 极平面:基本矩阵F
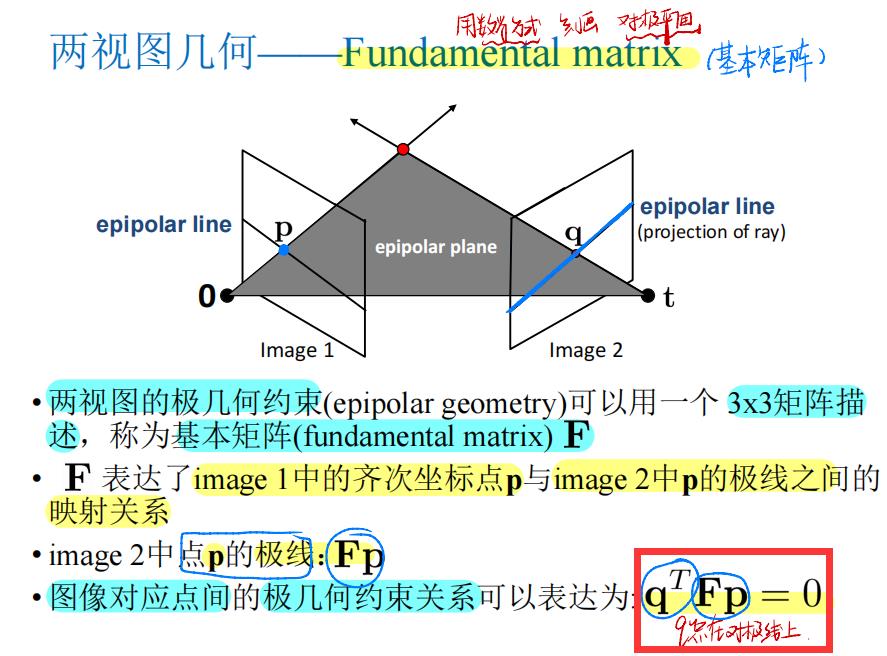

基本矩阵F秩为2,不满秩。

3. 8点法求F
通过8组图像对应点,求基本矩阵F。




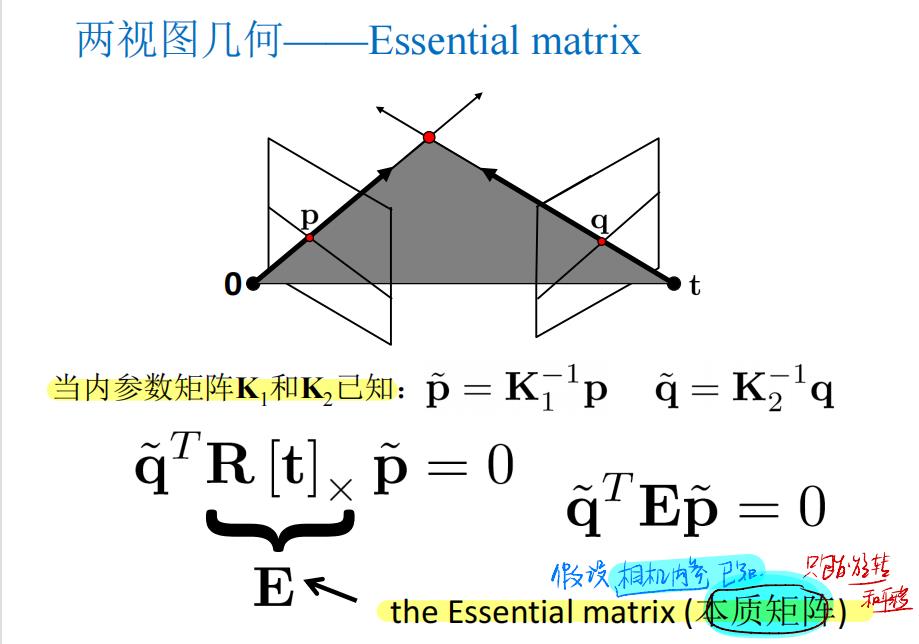
4. 本质矩阵E:假设相机内参数已知(5点法就可求出E)

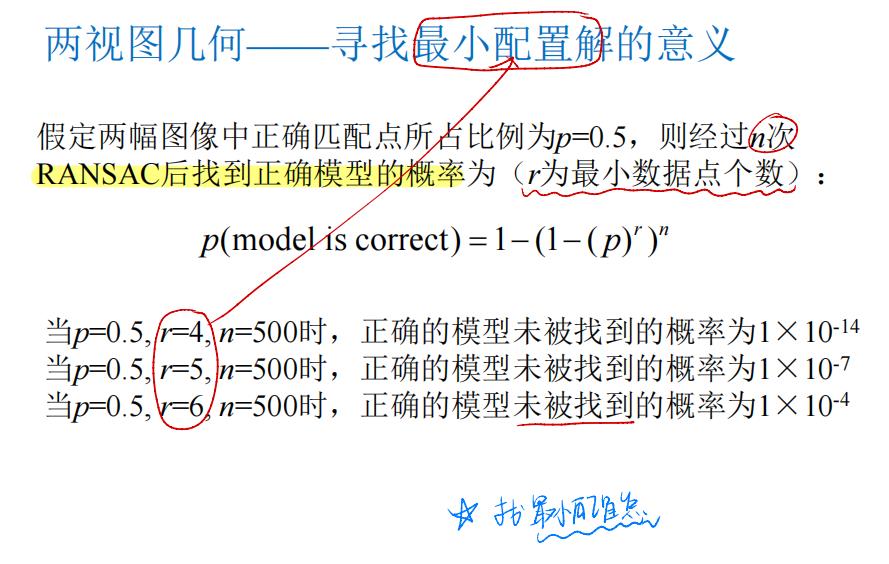
5. 最小配置解

以上是关于国科大人工智能学院《计算机视觉》课 —三维视觉—相机模型与多视几何的主要内容,如果未能解决你的问题,请参考以下文章
国科大人工智能学院《计算机视觉》课 —三维视觉—立体视觉与三维建模
国科大人工智能学院《计算机视觉》课 —三维视觉—三维表达与语义建模
国科大人工智能学院《计算机视觉》课 —三维视觉—三维表达与语义建模
国科大人工智能学院《计算机视觉》课 —三维视觉—三维表达与语义建模