国科大人工智能学院《计算机视觉》课 —三维视觉—相机标定与稀疏重建
Posted 鱼米粒
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了国科大人工智能学院《计算机视觉》课 —三维视觉—相机标定与稀疏重建相关的知识,希望对你有一定的参考价值。
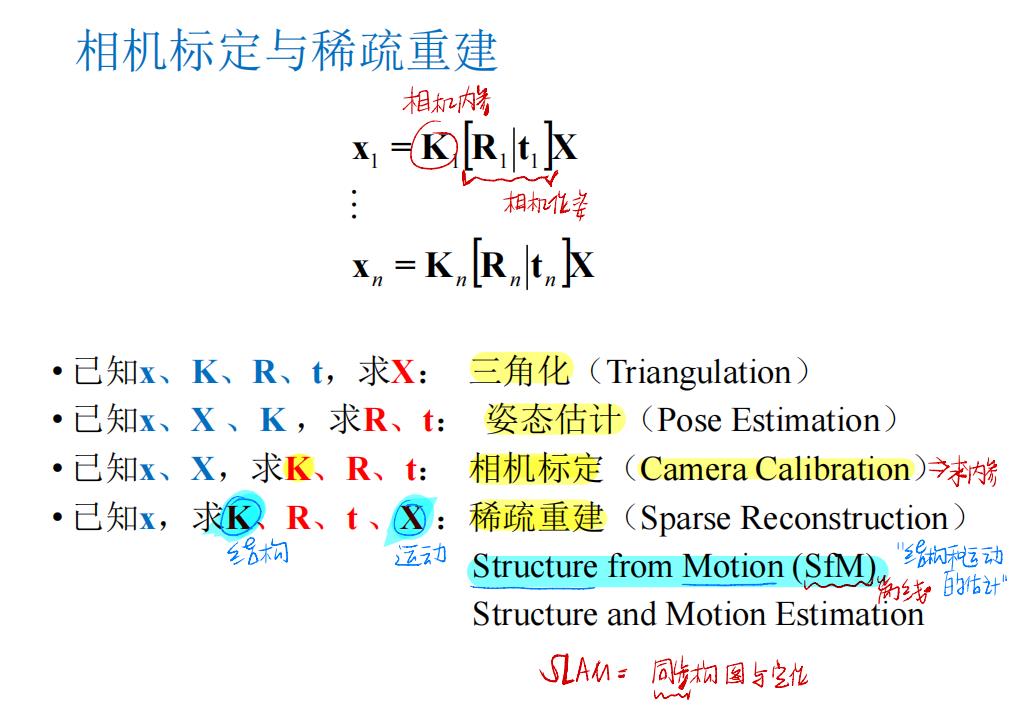
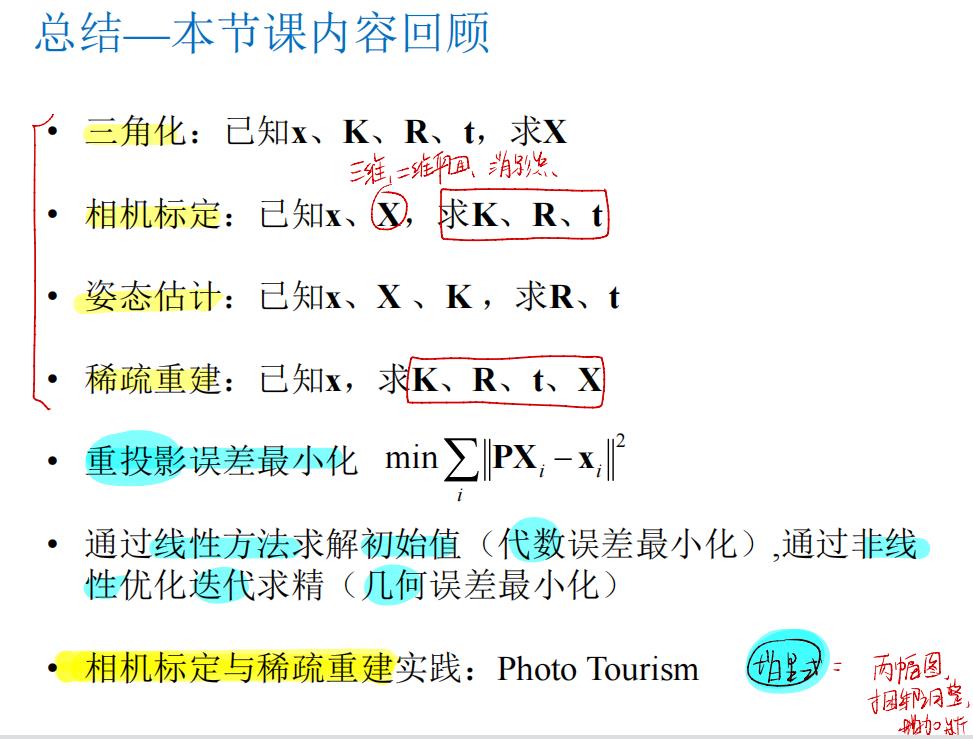
一、三角化:求X



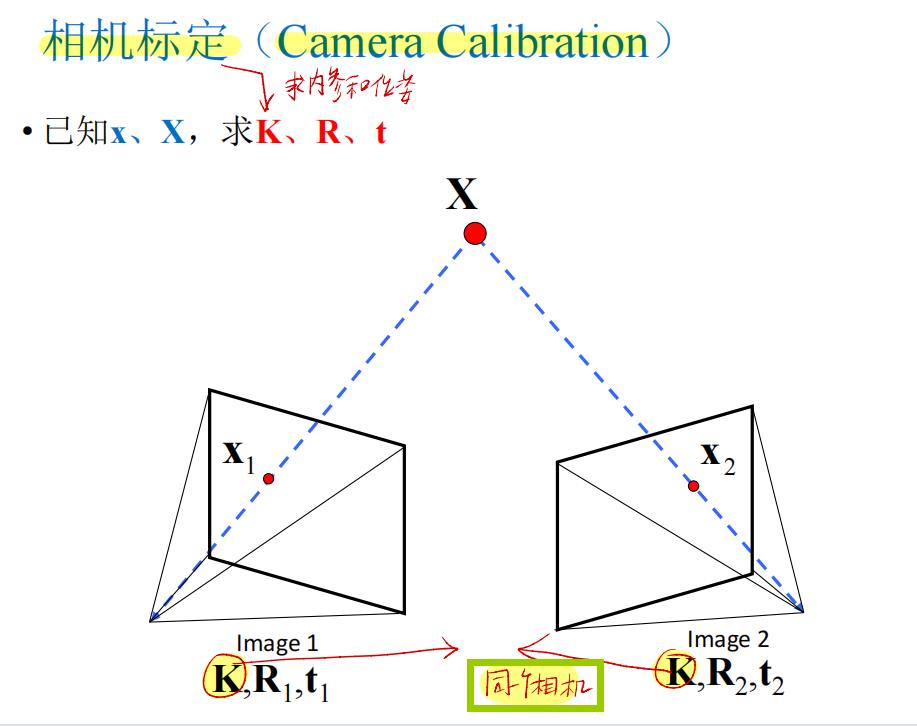
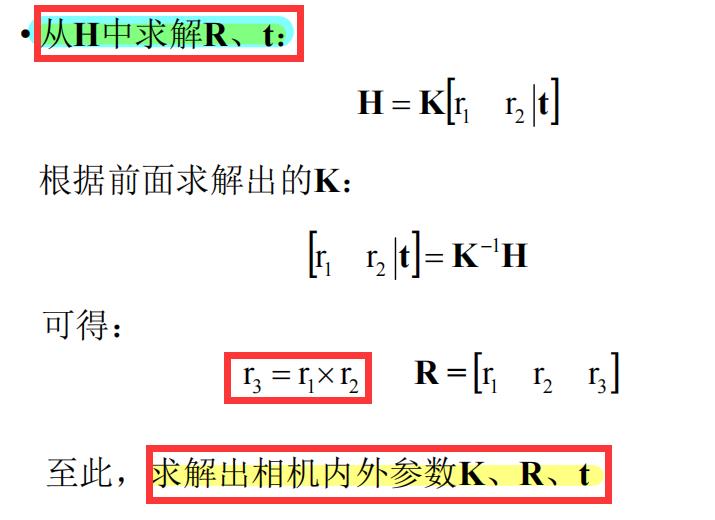
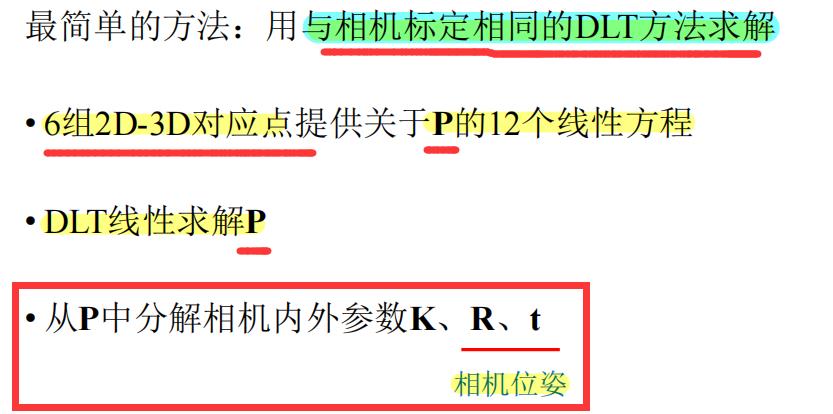
二、相机标定:求K、R、t(K是同一个)
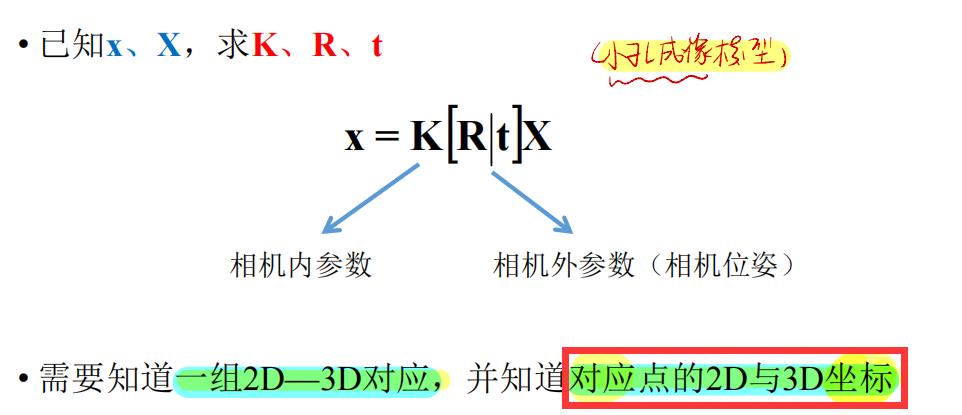

投影矩阵P有11个自由度。



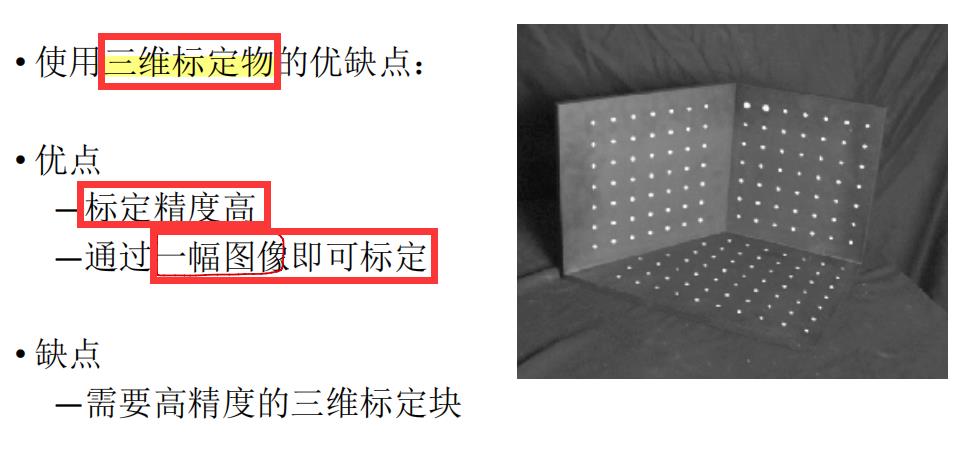
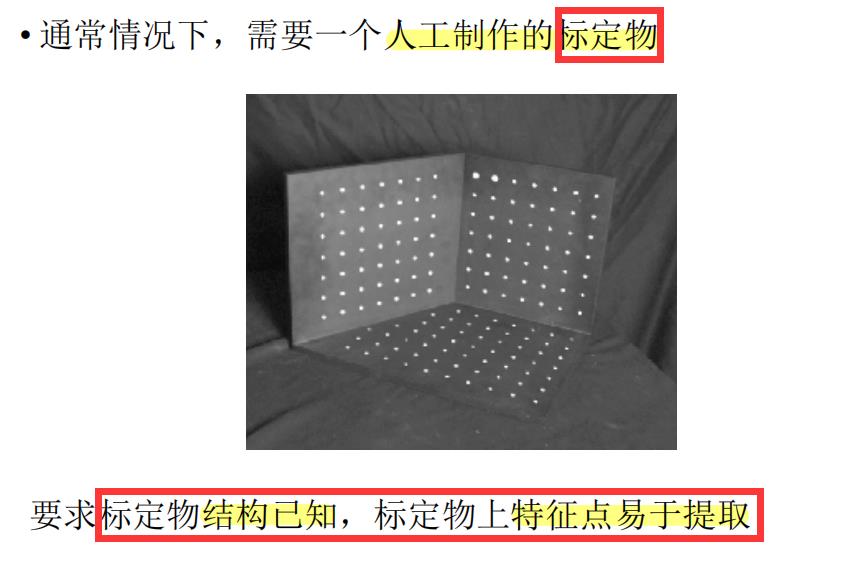
三维标定物:只需一幅图像
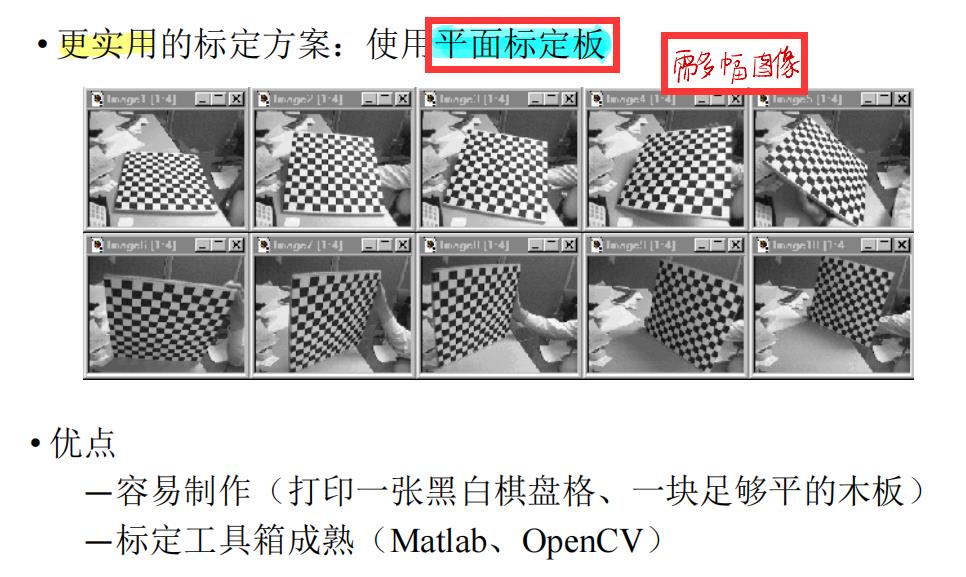
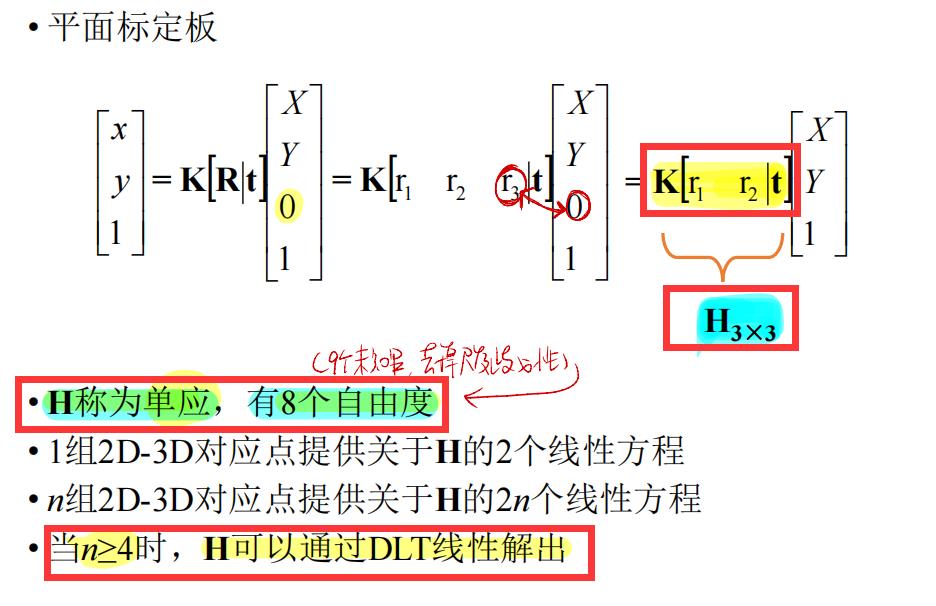
平面标定板:至少需要三幅图像




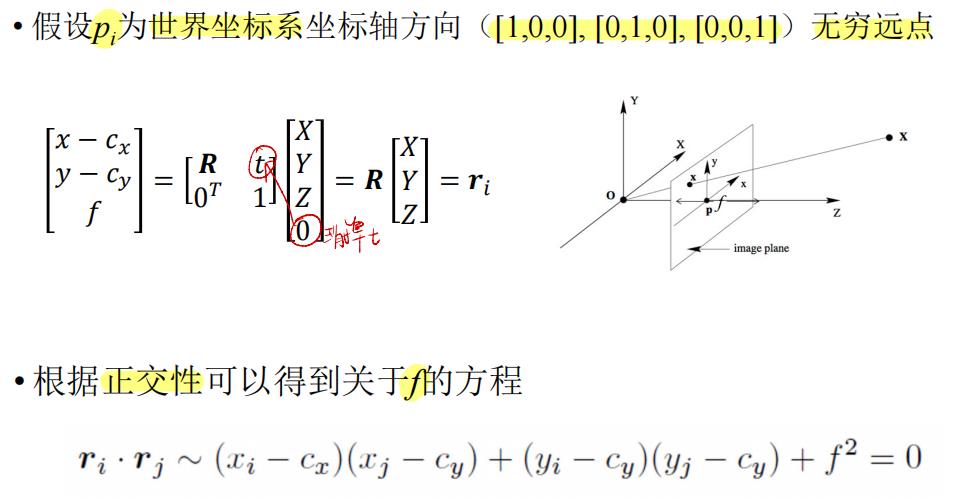
除了三维标定物和二维标定平面外,还可以利用消影点进行标定。


单应矩阵:
- 基本矩阵
- 单应矩阵
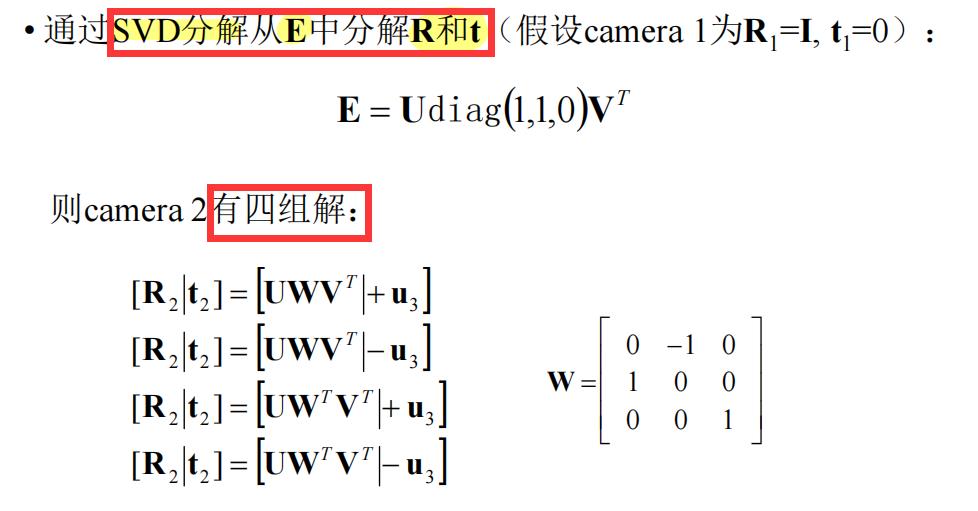
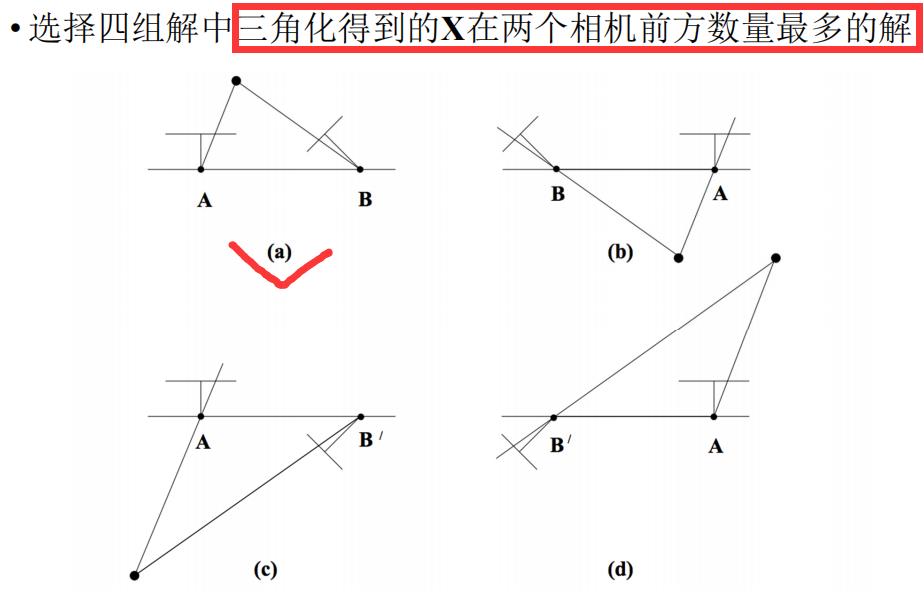
- 本质矩阵
- 投影矩阵
三、姿态估计:求R、t
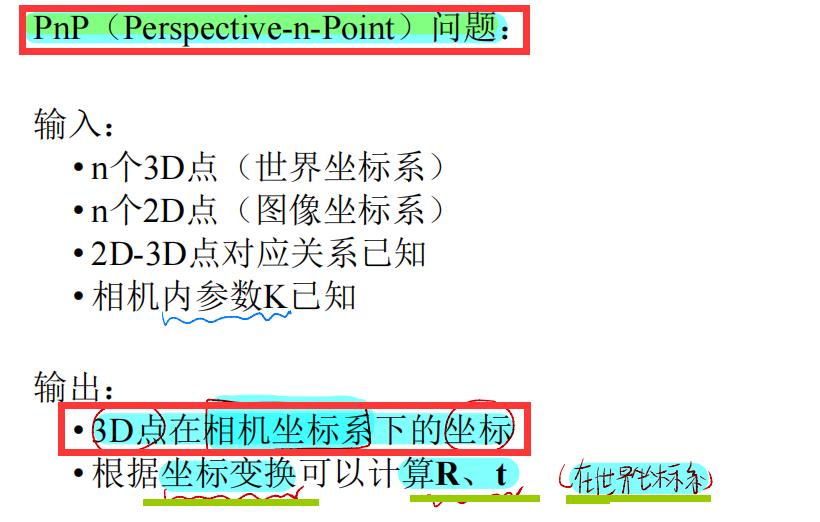
最少为 P3P
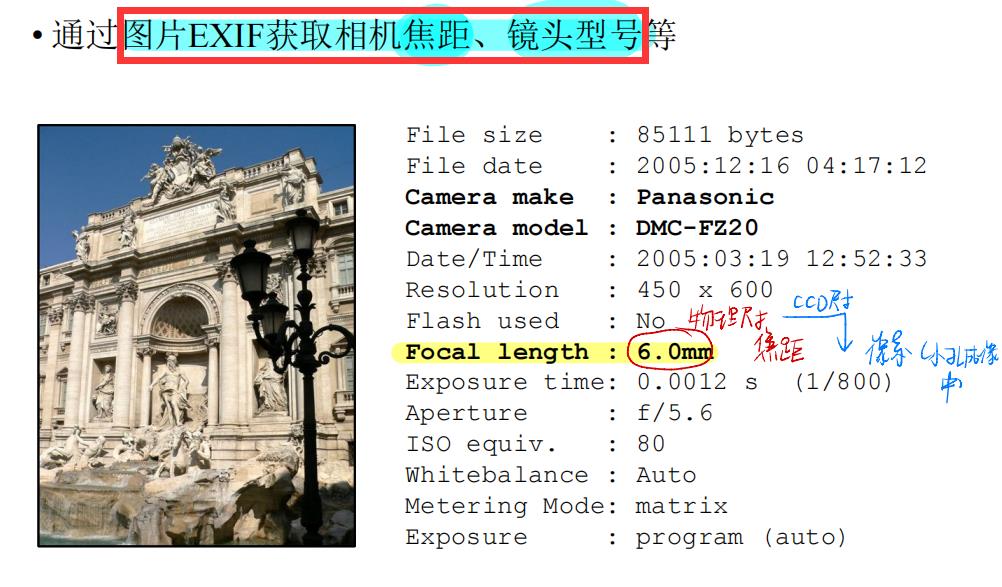
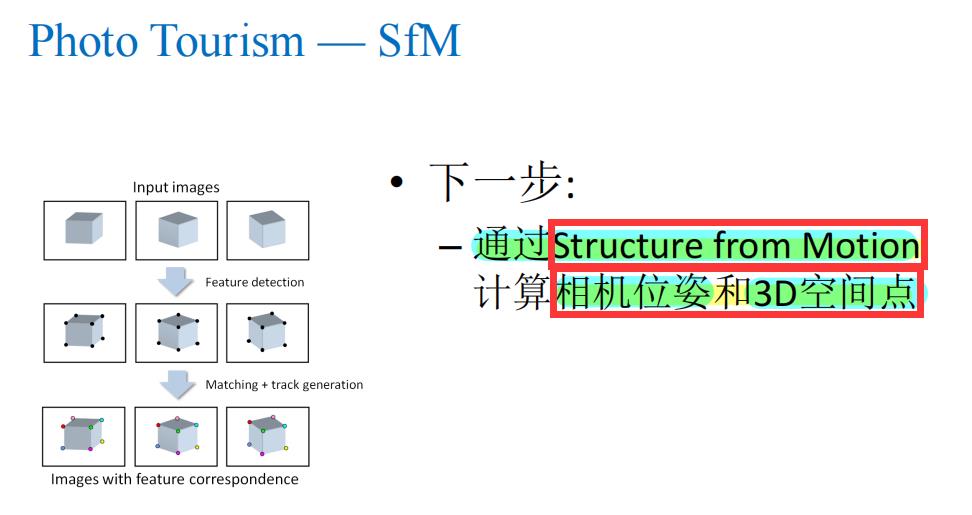
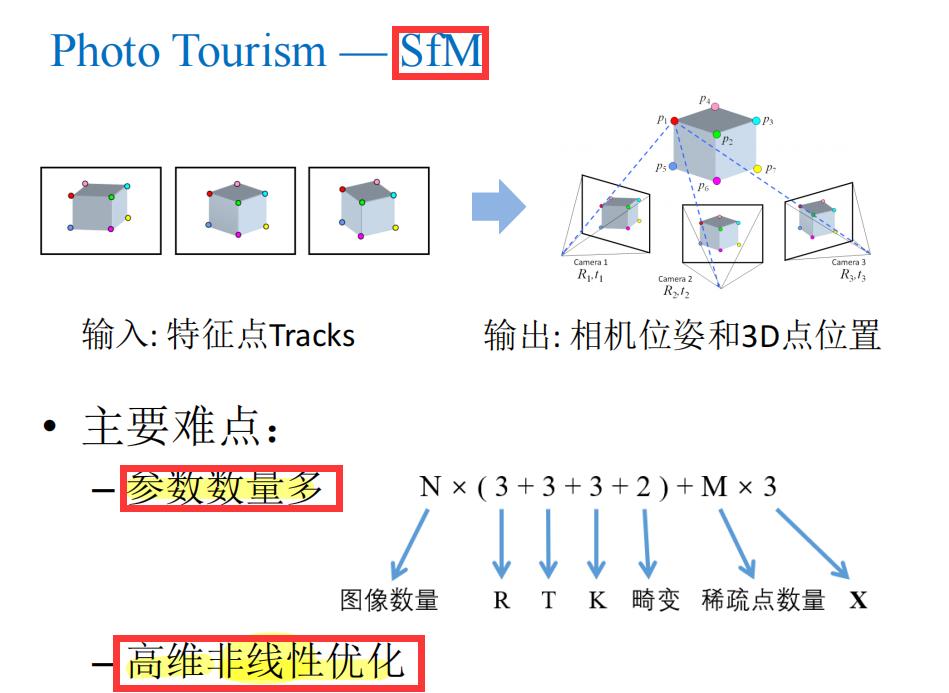
四、稀疏重建 SFM:求K、R、t、X



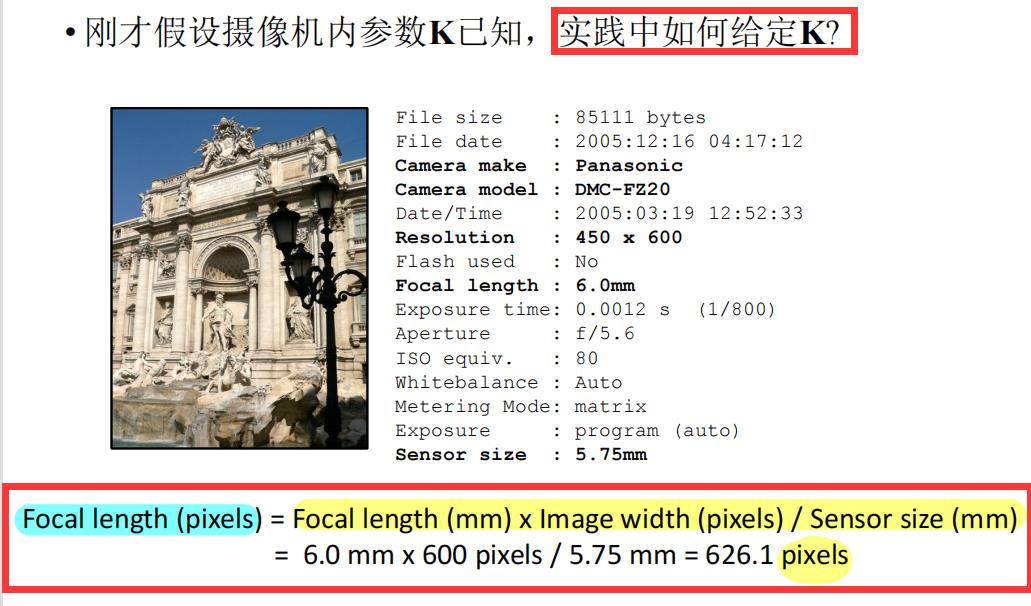
所以K假设已知,实则为多少呢?

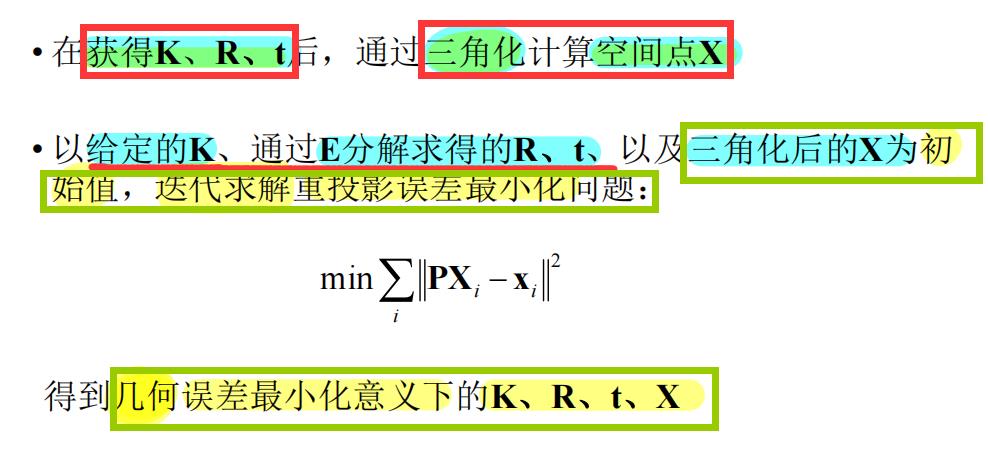
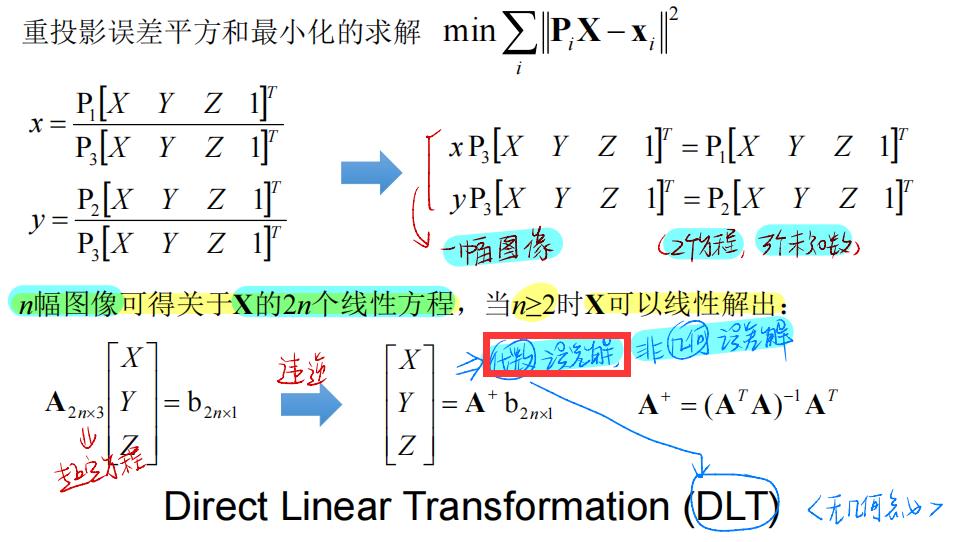
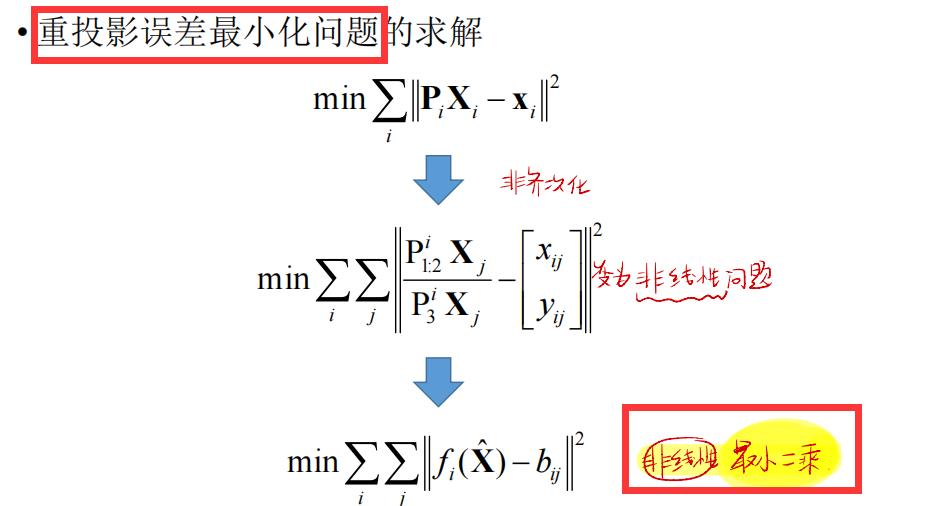
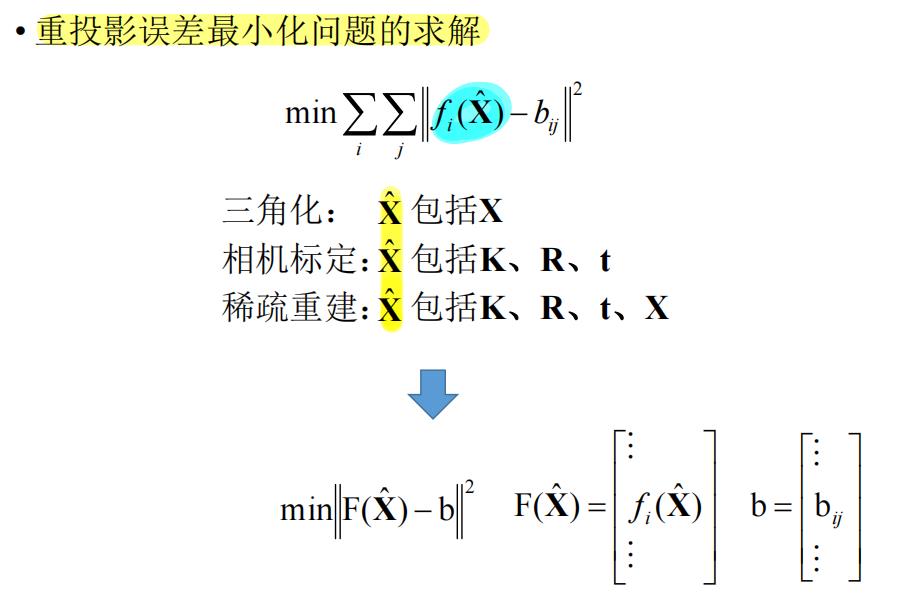
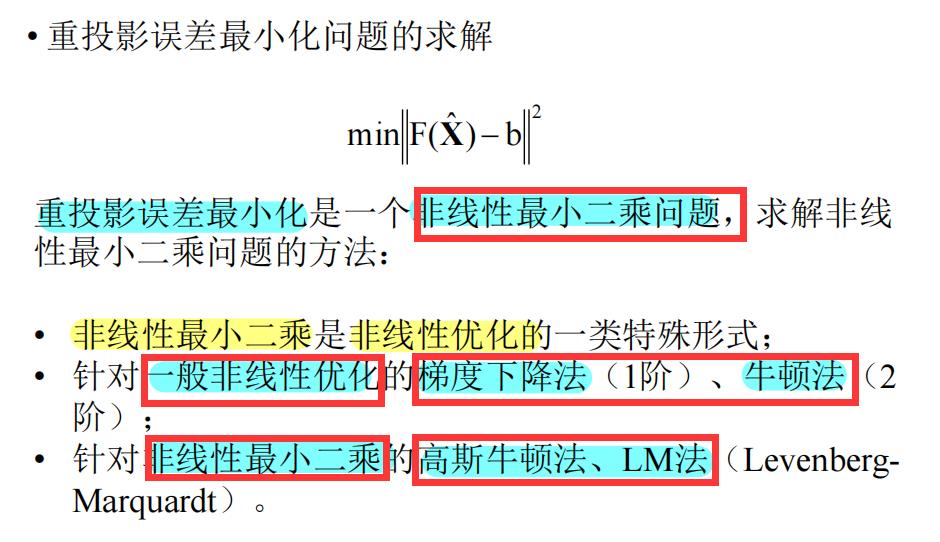
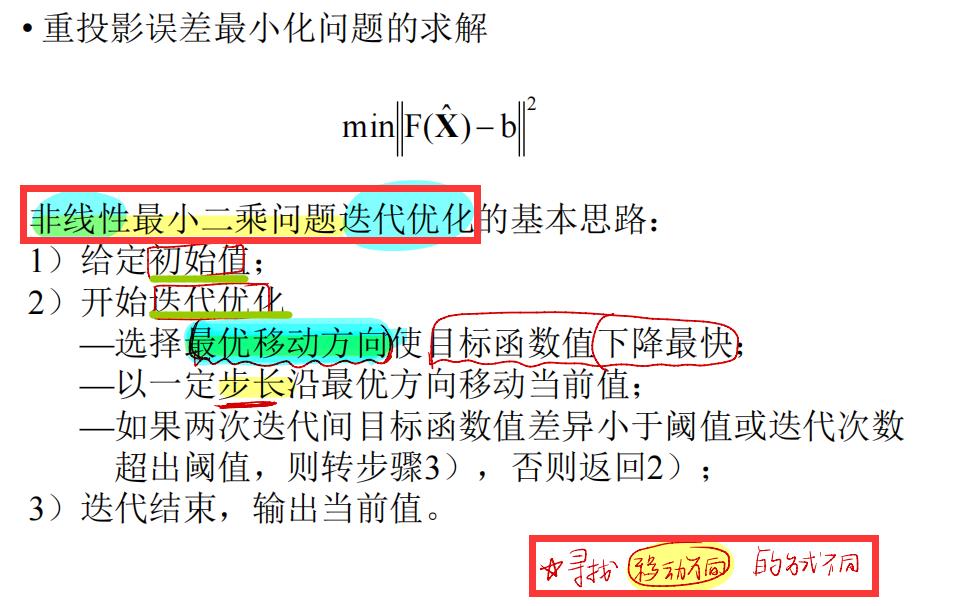
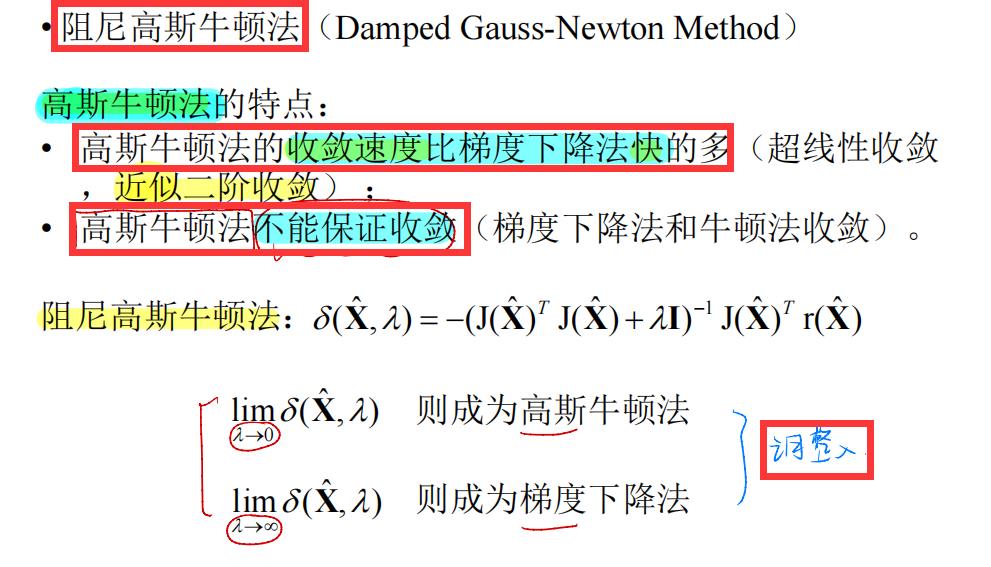
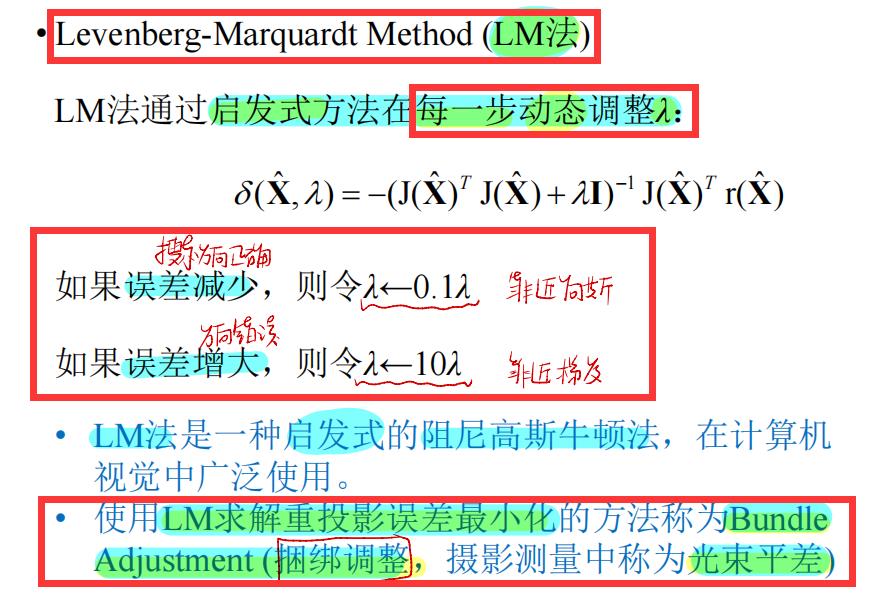
五、重投影误差最小化问题的求解


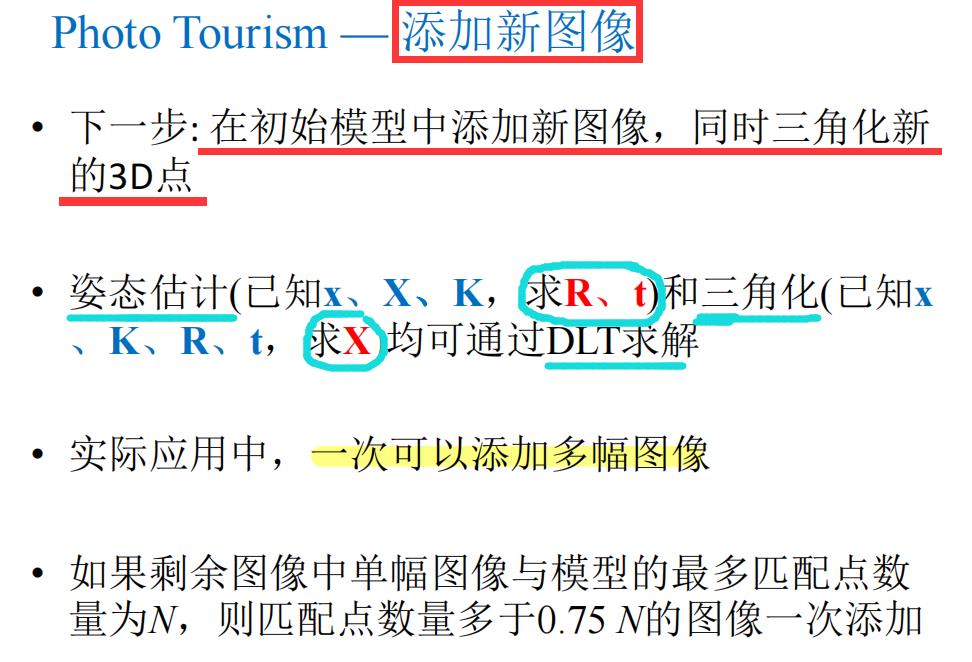
六、实践:增量式SFM
输入:网络搜索图像,重建 "罗⻢⽃士场 "
输入图像的性质:网络搜索的图像是海量的,但缺点有很多:
- 拍摄设备不同
- 拍摄时间不同
- 无序
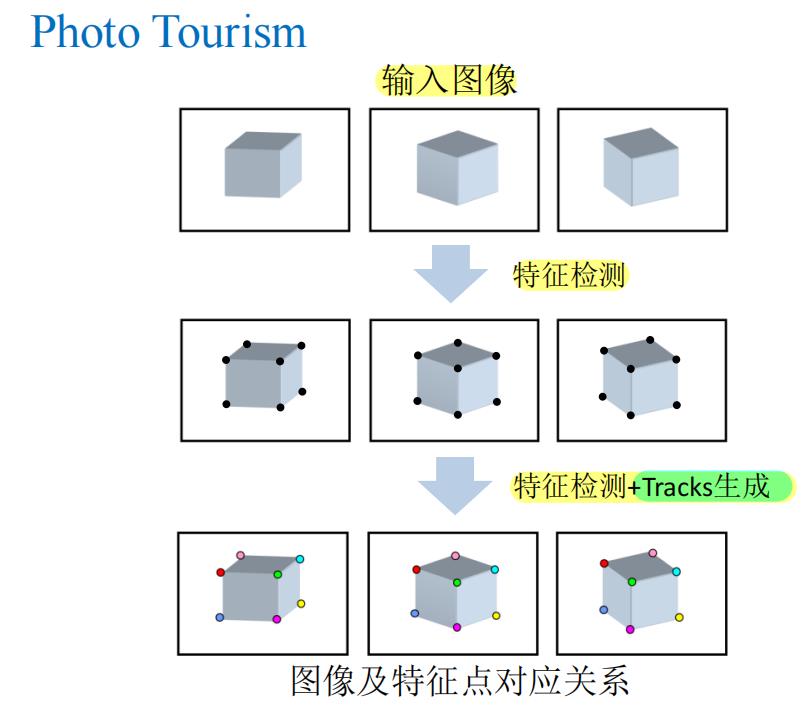
1. 特征检测:
- 在图像中提取SIFT特征
- 两两图像间进行特征匹配
- 通过8点法估计两两图像间的基本矩阵F,进一步去除错误对匹配点
- 在确定了两两图像匹配点后,下一步需要将匹配点连接为Tracks



怎么选择初始图像对?
初始图像对应该有足够多的匹配点,且基线足够长。


以上是关于国科大人工智能学院《计算机视觉》课 —三维视觉—相机标定与稀疏重建的主要内容,如果未能解决你的问题,请参考以下文章
国科大人工智能学院《计算机视觉》课 —三维视觉—立体视觉与三维建模
国科大人工智能学院《计算机视觉》课 —三维视觉—三维表达与语义建模
国科大人工智能学院《计算机视觉》课 —三维视觉—三维表达与语义建模
国科大人工智能学院《计算机视觉》课 —三维视觉—三维表达与语义建模