自动驾驶感知神器——激光雷达概述
Posted 智车科技
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了自动驾驶感知神器——激光雷达概述相关的知识,希望对你有一定的参考价值。
激光雷达凭借其探测距离远、精确度高的特点成为自动驾驶环境感知系统是最不可或缺的一种传感器。本文从技术市场等角度对激光雷达进行了概述。
激光雷达凭借其探测距离远、精确度高的特点成为自动驾驶环境感知系统是最不可或缺的一种传感器,但又因为其环境适应能力差等缺点注定了不能是唯一的一种。
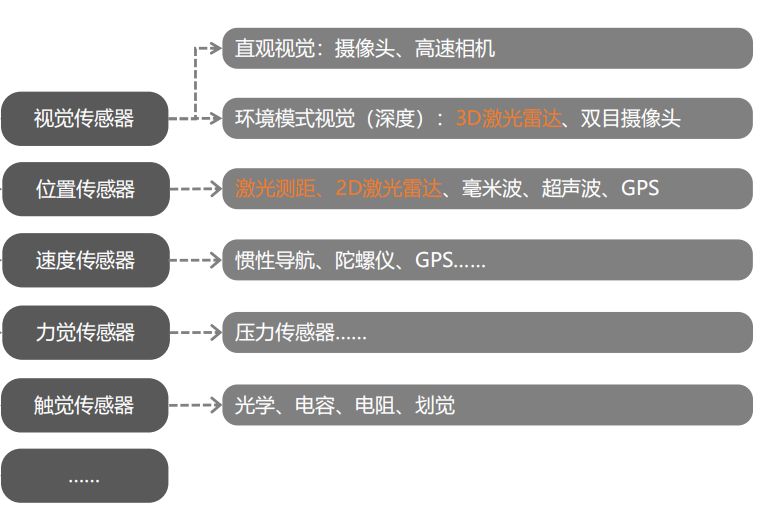
环境感知传感器种类
环境感知相关的传感器不止激光雷达一种,上图展示了相关类型,其中应用到自动驾驶汽车中的传感器主要有激光雷达、毫米波雷达以及摄像头等。
下面从探测距离、可靠度、行人判别、夜间模式、恶劣天气、细节分辨等维度对激光雷达、毫米波雷达、摄像头三种传感器的性能进行对比如下图。
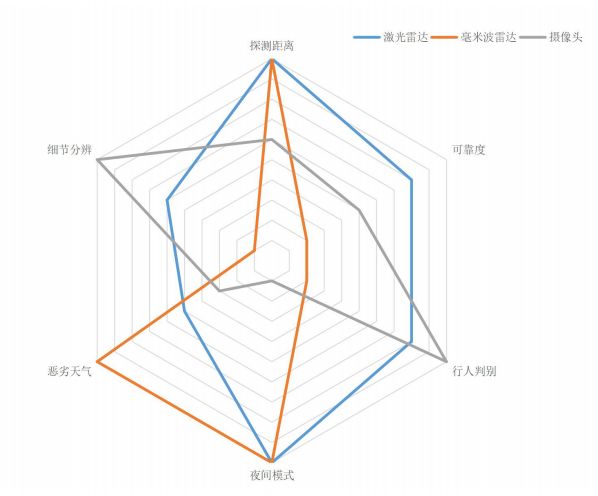
通过上图可以直观看出,激光雷达是三种环境感知传感器中综合性能最好的一种,这也就决定了它是自动驾驶汽车等机器人环境感知系统中不可或缺的一部分。
但是由于激光雷达在天气适应性和细节分辨上有明显短板,因此绝不会是环境感知系统中唯一的传感器。
根据维度分类,激光雷达分为一维激光雷达、二维激光雷达、三维激光扫描仪和三维激光雷达。其中自动驾驶车辆中应用的就是三维激光雷达。
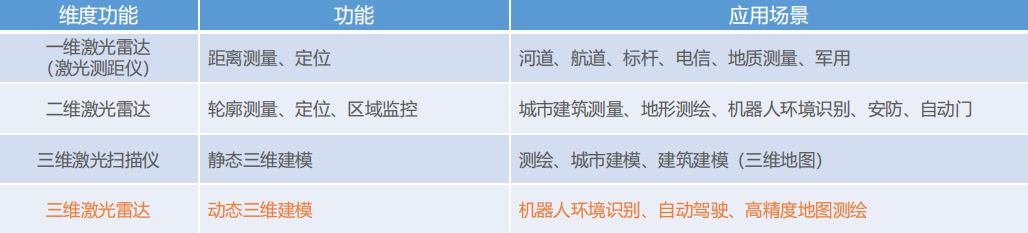
不同维度激光雷达功能及应用场景
在自动驾驶车辆中应用的三维激光雷达,目前以自动驾驶系统训练为主要应用,测试市场为主的情况下,对产品的标准化成都要求不高,耐用性和可靠性要求也不高,价格敏感度低,目前全球市场主要被VELODYNE主导。
技术分析
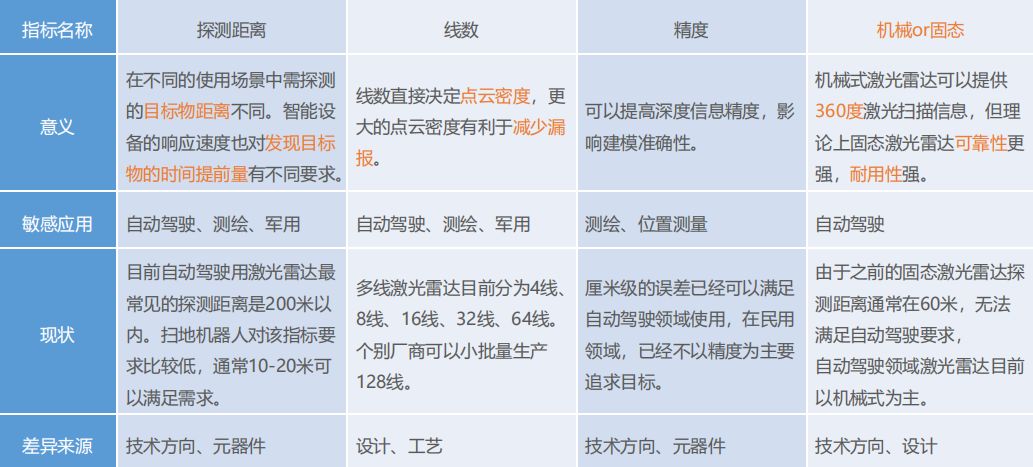
激光雷达模块的关键技术如下表:
激光雷达分为固态激光雷达和机械式激光雷达两类。它们的区分主要看激光发射器是固定的还是运动式的。
机械式激光雷达的优点为扫描速度快、 接收视场小、可承受高的激光功率等。缺点为结构笨重;由于内部光路结构,反射信号接收比低;装调工作量大。
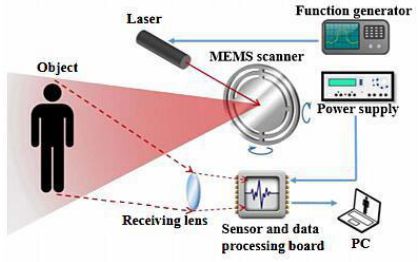
以Velodyne全家桶为例,发射系统和接收系统存在宏观意义上的转动,也就是通过不断旋转发射头,将速度更快、发射更准的激光从“线”变成“面”,并在竖直方向上排布多束激光形成多个面,达到动态3D扫描并动态接收信息的目的。但由于其复杂的机械结构,平均的失效时间仅1000-3000小时,难以达到整车厂们的最低要求的13000小时。

Velodyne机械式激光雷达
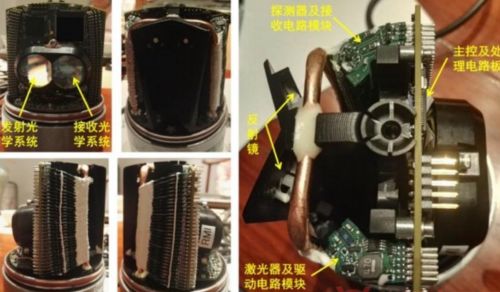
机械式激光雷达构成组件
固态激光雷达的发射源和接收器都是固定在一个装置内不动的,它会通过一系列的方法把激光导向空间的各个方向,实现对周围空间的扫描,一般分为MEMS( Micro-Electro-MechanicalSystem)、光学相控阵激光雷达(OPA,Optical Phased Array)和泛光面阵式激光雷达(Flash)。
MEMS( Micro-Electro-MechanicalSystem),微机电系统,指尺寸在几毫米乃至更小的高科技装置。优点为体积小,宏观结构简单,耐用、可靠性强,功耗低;缺点为半导体工艺难度太大,材料可选范围小。
常见的MEMS产品包括MEMS加速度计、微马达、微泵、微振子、MEMS光学传感器、MEMS压力传感器、MEMS陀螺仪等以及它们的集成产品。
相控阵(OPA)发射器由若干发射接收单元组成阵列,通过改变加载在不同单元的电压,进而改变不同单元发射光波特性,实现对每个单元光波的独立控制,通过调节从每个相控单元辐射出的光波之间的相位关系,在设定方向上产生互相加强的干涉从而实现高强度光束,而其它方向上从各个单元射出的光波彼此相消。组成相控阵的各相控单元在程序的控制下,可使一束或多束高强度光束的指向按设计的程序实现随机空域扫描。

固态OPA激光雷达Quanergy S3
优点有:①扫描速度快:一般都可以达到MHz量级以上;②扫描精度或指向精度高:千分之一度量级以上;③可控性好:除对目标区域进行高密度的扫描外,在其它区域也能进行稀疏扫描。
缺点有:①制造工艺难度较大:阵列单元尺寸必须不大于半个波长,一般目前激光雷达的工作波长均在1微米左右,阵列单元的尺寸必须不大于500纳米;②材料的研究和选择也是非常关键的因素:到目前为止,铌酸锂晶体、PLZT压电陶瓷、液晶和AlGaAs基波导光学相控已得到开发。
泛光面阵式(Flash)是目前全固态激光雷达中最主流的技术。成像系统向外发射光源,发射出的光源在到达物体表面后,一部分反射回图像上的像素点。而由于物体表面到返回点的距离不同,其反射光飞行时间(TOF)不同,通过对光飞行时间的测量,每个像素就可获得独立的距离信息,其探测范围可以达到百米以上。摄像头可以实现百万像素级别的分辨率快速3D成像。

德国大陆FLASH面阵激光雷达
优点为:①纯固态激光雷达:没有任何机械传动结构;②成像速度快;③成本低:集成度很高,在批量达到一定水平后,成本会很低;④非离散采:改善了感知系统对环境的空间理解能力。
缺点为:①受限于目前芯片技术水平,目前还是应用在非车辆级别;②扫描距离问题一直是瓶颈,由于是多发射器同时发射脉冲激光,因此模块功率很难升上去;③安装后只能向固定方向扫描。
现在业界OPA和MEMS都是比较成熟的激光雷达解决方案,目前它们的角分辨率最好的目前已经可以做到0.01°。
本文整理了全球激光雷达主流厂商如下表:
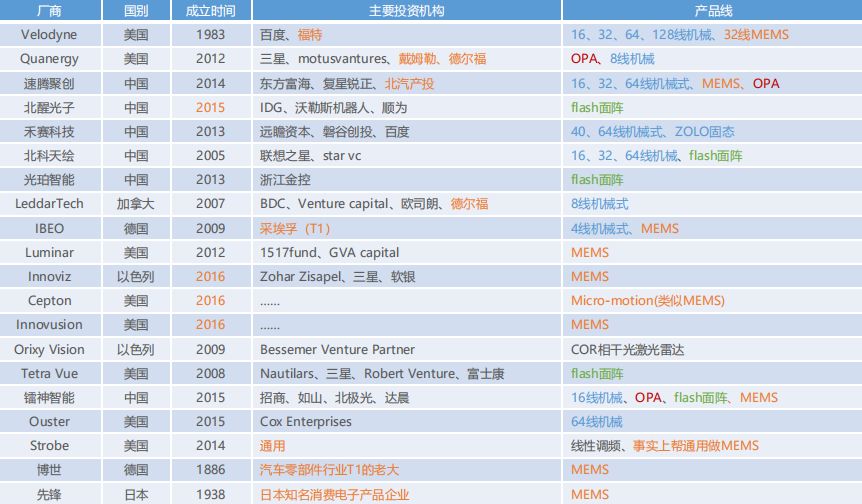
其中做机械式的有9家,做MEMS的有10家,做flash面阵的有5家,做OPA的有3家。
从可靠性、量产难度、量产后成本、工艺成熟度、性能等维度对机械式激光雷达、MEMS激光雷达、OPA激光雷达、Flash激光雷达进行对比如图。
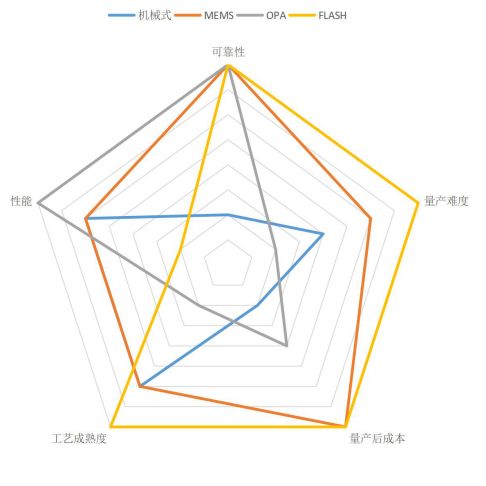
通过上图可以看出光相控阵OPA理论性能最为强悍,光相控阵OPA功率受限无法满足距离要求;MEMS性能其次,但量产已经具备可能性,MEMS方案一致性和产品寿命始终无法保证;Flash工艺最为成熟,供应链齐全,Flash系统的输出能量限制,不可能超越单点测距的系统。
激光雷达产业构成
激光雷达系统复杂,涉及的核心元器件众多:光电探测器、激光器、准直镜头、扫描镜、数模转换器等等。核心元器件目前主要是国外厂商垄断,国内很少有企业有能力自主量产。

核心元器件厂商
市场概况
近年来,全球汽车的销售量预计将仅增长3%,但预计截至2022年,汽车传感器出货量的平均增长率将在未来五年达到8%以上,销售额增长将超过14%。这主要得益于毫米波雷达、摄像头以及激光雷达高价值传感器模块日益广泛的应用。
2016年,全球汽车MEMS和传感器市场规模为110亿美元,到2022年预计可增长至230亿美元。
到2022年毫米波雷达、摄像头以及激光雷达市场预计将分别增长至77亿美元、62亿美元和14亿美元。
激光雷达行业发展趋势
激光雷达客户分为测试客户和整车客户,二者关注点不同,测试客户是目前的主要客户群体,而整车客户还需要产品达到车规级要求,并且自动驾驶民用市场启动后才能释放需求。
纵观全球顶级汽车厂,都有既定的第一批LEVEL 3以上功能量产车下线时间(SOP – Start of Production),从2019-2022不等。
整车厂对成本控制极其严格,几百美金是他们能接受的价格上限。
整车厂要求产品满足苛刻的车规认证,只要一条不满足,整车厂都不会承担这个风险。
由于这些条件的限制,他们往往只能考虑固态激光雷达
整车厂对激光雷达有何看法?
机械式激光雷达只在造型上就无法接受。工程车可以不用过多考虑外观而得到应用,但乘用车还是会优先考虑固态的激光雷达。
目前机械式雷达的平均的失效时间仅1000-3000小时,难以达到整车厂们的最低要求的13000小时。
相控阵的特性非常突出,但它从概念性产品到工业级产品,再到可量产化的产品还需要一定的时间。因此目前的观点是偏向于MEMS激光雷达。
未来基于MEMS的激光雷达,成本可能会在千元左右,可以很好的缓冲传统机械式雷达的价格昂贵,以及相控阵纯固态LIDAR短时不能落地的尴尬。
FLASH也是一种选择,但是由于其探测距离的先天不足,目前已经不是最优选择。
从国外几家主要LiDAR企业的产品路线来看,不难看出,大家发力点都瞄准在固态,毕竟小型化、低成本、可靠性高是未来自动驾驶领域的趋势。
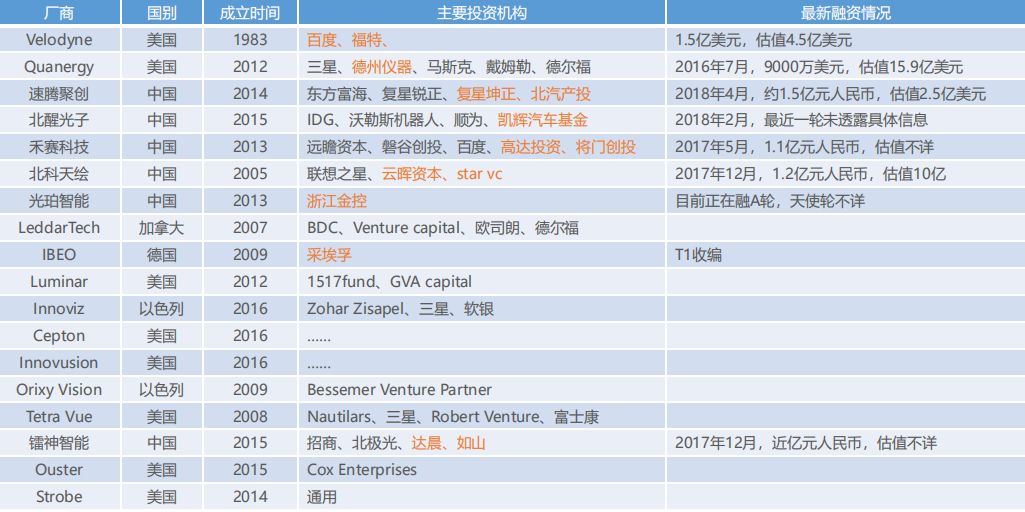
全球激光雷达主流厂商融资情况整理
duang的一下,
我们就到了2019年
智车科技已经陪你走过n多日夜啦
智车科技一步步从稚嫩走向成熟
希望通过自己的成长给粉丝带来最好的体验
成为小伙伴们生活工作中坚实的依靠~
智车科技能够长远前行
靠的就是各位“芝麻”(小智的粉丝爱称)的关怀~~
今天,小智再次静心和芝麻们交流
想要问问各位
我们的前进还需要什么?
你可以通过扫码二维码来填写报名表单

小智期待“芝麻”们的热情回复~


推荐阅读
▼
▎本文参考自来源于汽车产业链系列研究报告,智车科技(IV_Technology)整理编辑,转载请注明来源。如有侵权请第一时间联系我们。
以上是关于自动驾驶感知神器——激光雷达概述的主要内容,如果未能解决你的问题,请参考以下文章