相机标定的时候,halcon标定板和普通的标定板有啥区别么?
Posted
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了相机标定的时候,halcon标定板和普通的标定板有啥区别么?相关的知识,希望对你有一定的参考价值。
halcon标定板兼容halcon专用软件!
比如德国MVtech公司的Halcon和ActiveVision Tools机器视觉软件
以下是haocon标定板和普通标定板图片:
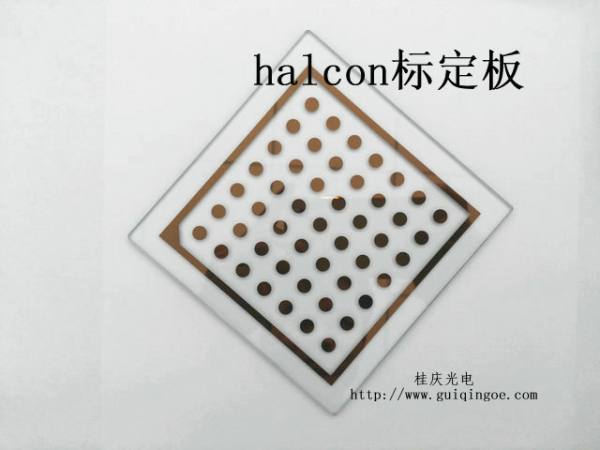
图片来自@桂庆光电官网

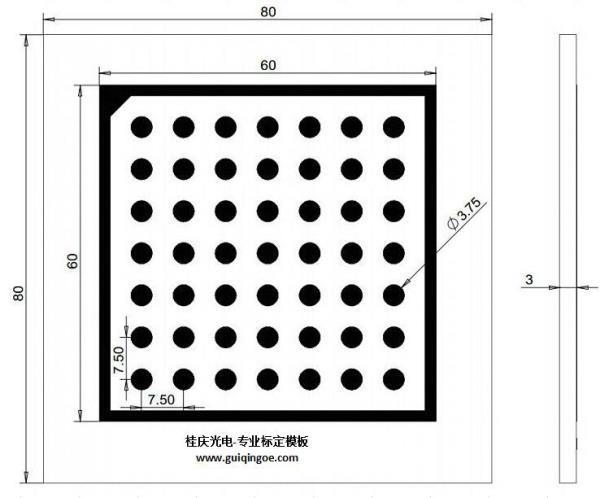
halcon标定板以60*60mm的规格举例:
7*7阵列
外边框长度: 60mm*60mm
内边框长度: 58.125mm*58.125mm
即:黑色边框线为一个圆点半径1.875(直径是3.75)
黑色圆点直径: 3.75mm
圆点中心间距: 7.50mm
边角:由黑色外边框向内缩进一个中心边距的长度(7.50mm)
这个就是halcon标定描述文件生成的一个的标定板规格
halcon标定板是halcon软件专用,
halcon软件图案外边框有三角标志点
普通圆点标定板无外边框标志点
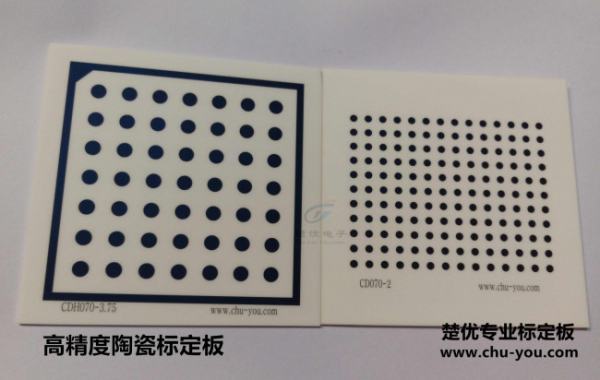
halcon标定板兼容halcon专用软件!

普通圆点标定板可使用与各种软件
最注意特点为不带边框
Halcon学习笔记-手眼标定-九点法
图像识别包括:采集、预处理、分割、识别。其中九点标定属于分割这一步。
机械手坐标系就是一个右手坐标系
九点标定
得到9个圆点的像素坐标
标定的目的
标定最后得到的是一个坐标变换矩阵,表述的是相机和机械手之间的位置关系,也就是仿射变换(一个矩形到另一个矩形的变换过程。)
设备
相机、镜头、控制器、机械臂、电脑
相机和镜头之间通过螺纹连接,通过旋转实现调焦。
相机和控制器的都要连接电脑,并且需要在电脑上下载驱动,
控制器和电脑之间通过串口连接,由此电脑给控制器发送指令
抓取的步骤:
1.标定(九点标定):获得得到像素坐标、机械手坐标以及坐标映射得到的标定矩阵
2.识别
3.抓取
坐标发给机械手控制器
视觉采集识别软件与九点标定软件是通过udp实现通信的
PC跟控制器之间是通过串口通信的
机械手底座的中心位置就是原点
机械手末端加吸盘,也就是真空泵
下位机-控制系统
通信方式:串口通信、网口通信
C#、C++联合halcon在启蒙续集
机械臂并联手和串联手的区别:就是轴之间的坐标是否会相互影响。
以上是关于相机标定的时候,halcon标定板和普通的标定板有啥区别么?的主要内容,如果未能解决你的问题,请参考以下文章