三角学,向量,矩阵和四元数(上)
Posted chaunceyctx
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了三角学,向量,矩阵和四元数(上)相关的知识,希望对你有一定的参考价值。
辣鸡楼主之前高中空间几何马马虎虎,所以基础的几何知识就不会再阐述了
2D坐标系
1.2D笛卡尔坐标系较为简单就没mark了
2.2D极坐标
i.使用两个变量定义一个点到原点(极点)的距离r,方向θ(与X轴正方向夹角),这里有个注意点左手坐标系中顺时针方向角度为正,而右手坐标系中逆时针方向角度为负。
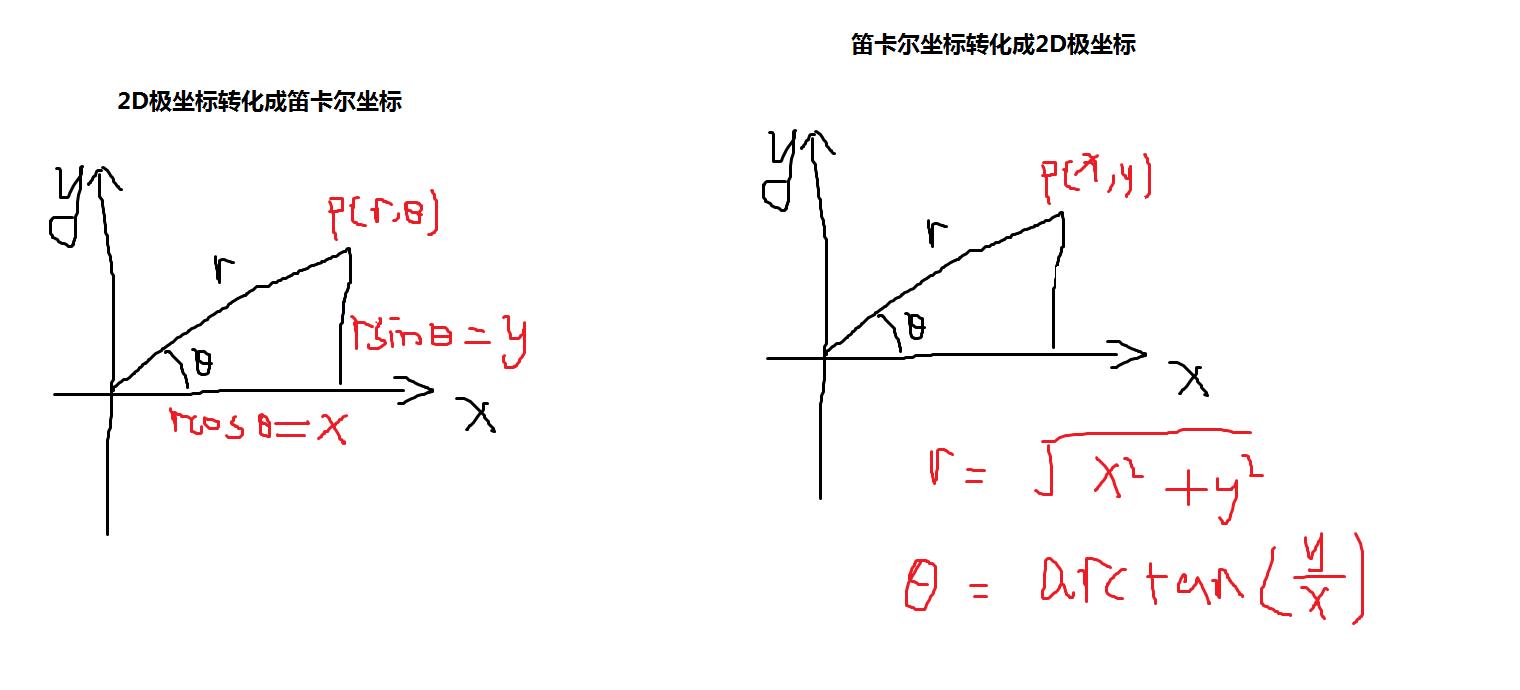 右图θ可以使用arcsin或者arccos来计算
右图θ可以使用arcsin或者arccos来计算
ii.主要应用:弹道,瞄准,导航方面
3D坐标系
1.3D笛卡尔也较为简单没mark
2.3D柱面坐标系
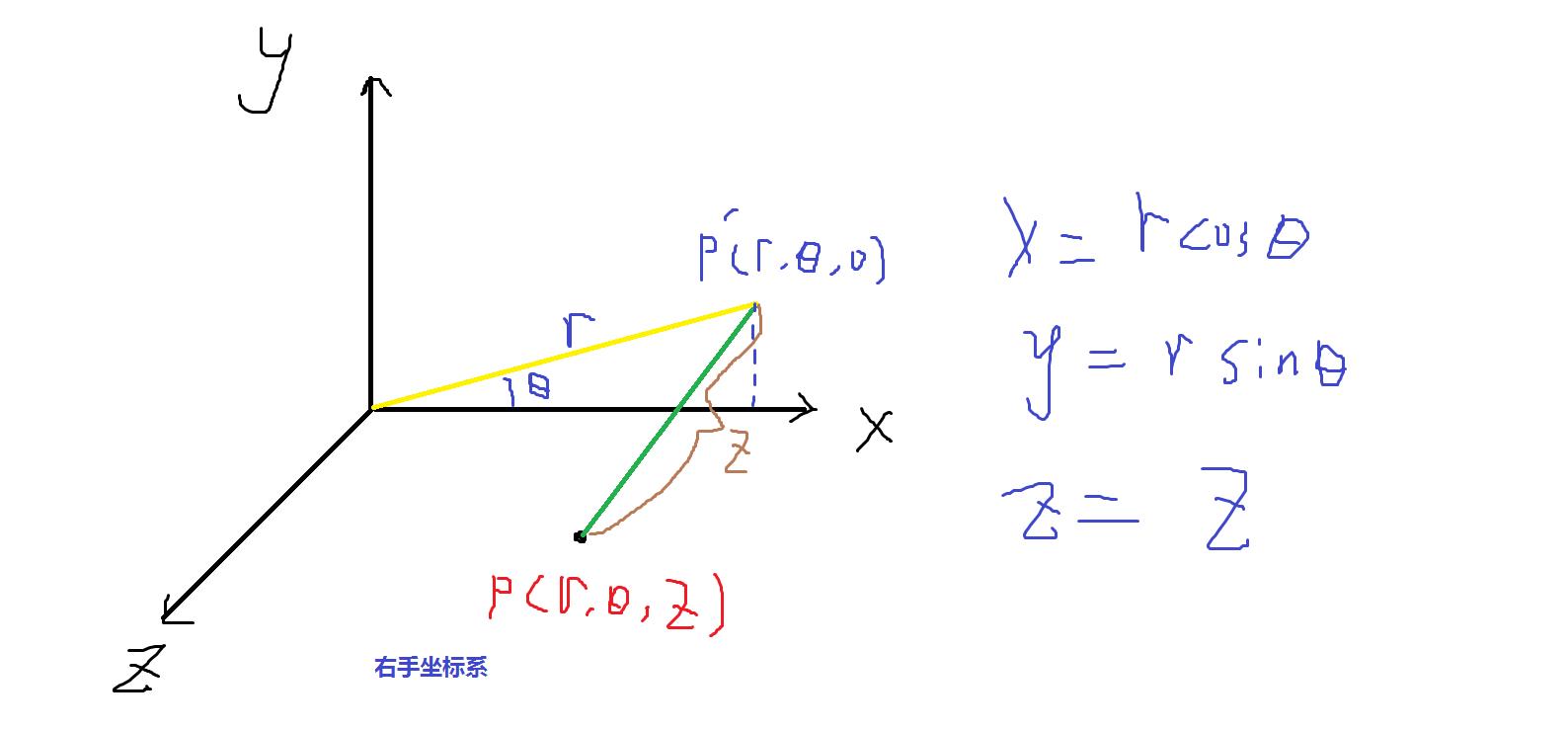
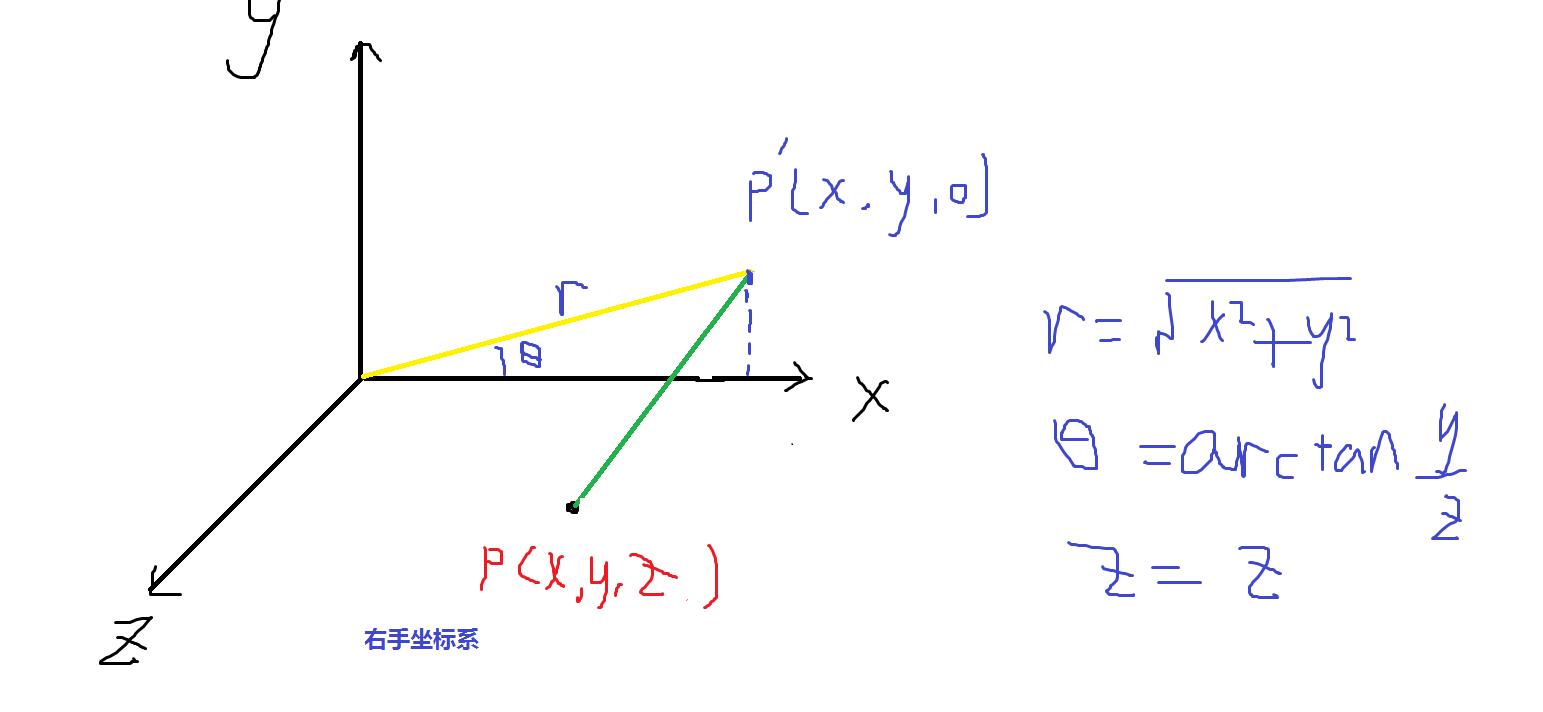
其实3D柱面坐标完全是由2D极坐标或者2D笛卡尔坐标转化而来,左图先根据2D极坐标知识确定p\'点再往屏幕外平移z个单位即可,右图也同理
2.3D球面坐标系
用两个角度和到原点距离确定顶点P(ρ,Ø,θ)ρ为到原点距离
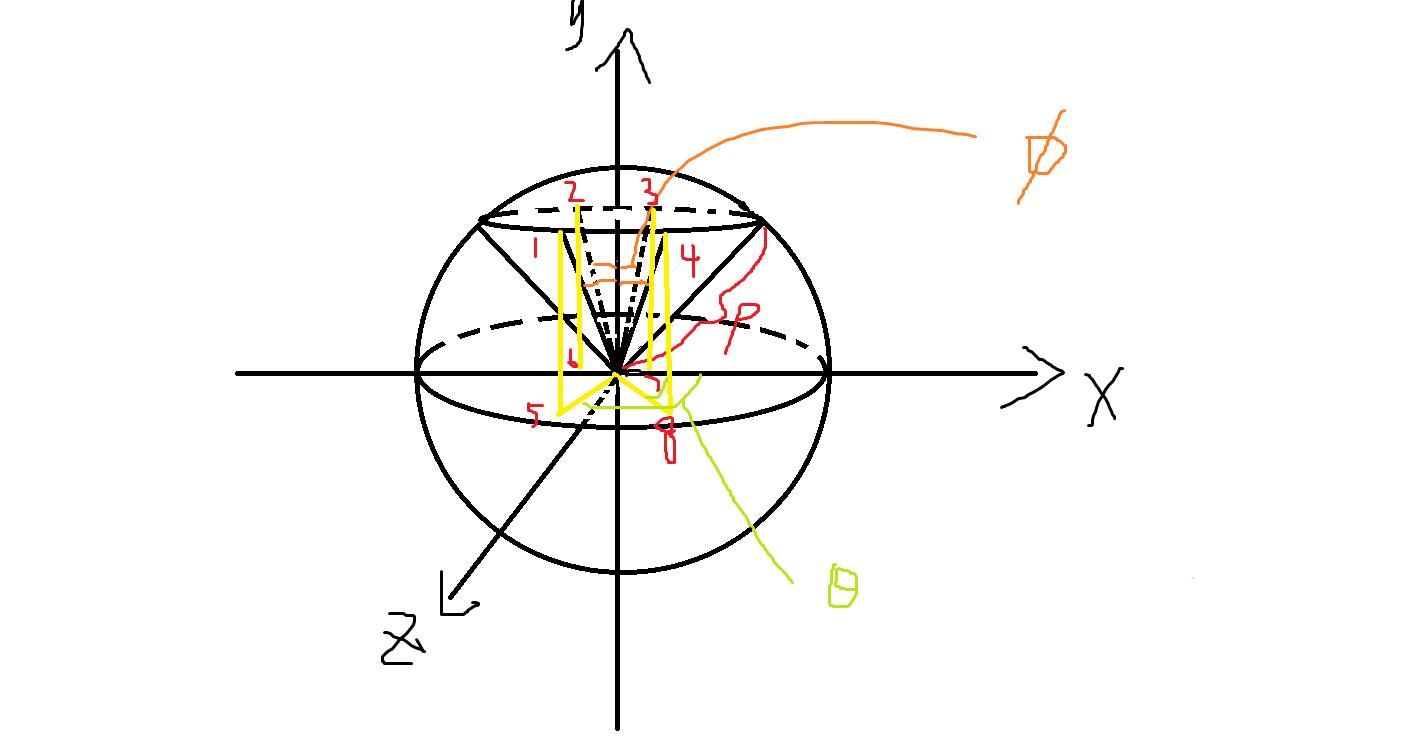
一图胜千言:
由ρ确定圆锥,由Ø确定1,2,3,4点(最终点就是其中一个),由θ确定5,6,7,8点然后对应上去找到1,2,3,4其中某点即为所要的点
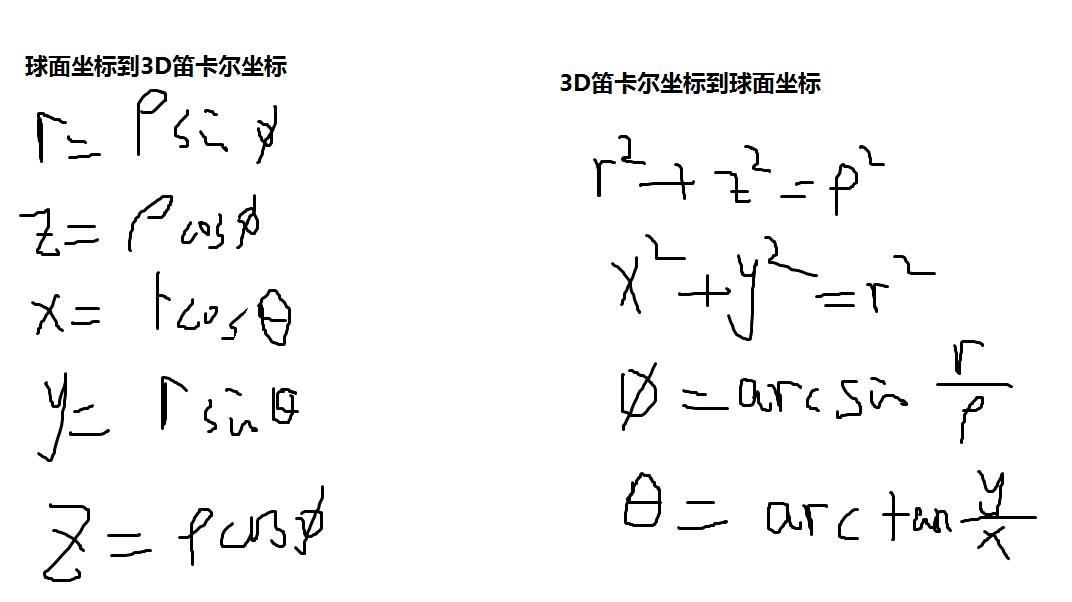
转换公式
三角形:
i.直角也叫作底角
ii.1弧度 = 57.296°
注意点:计算sin cos tan慢,arc更加慢,应当确认是否确实需要知道角度值,若需要则可以用到查找表插值
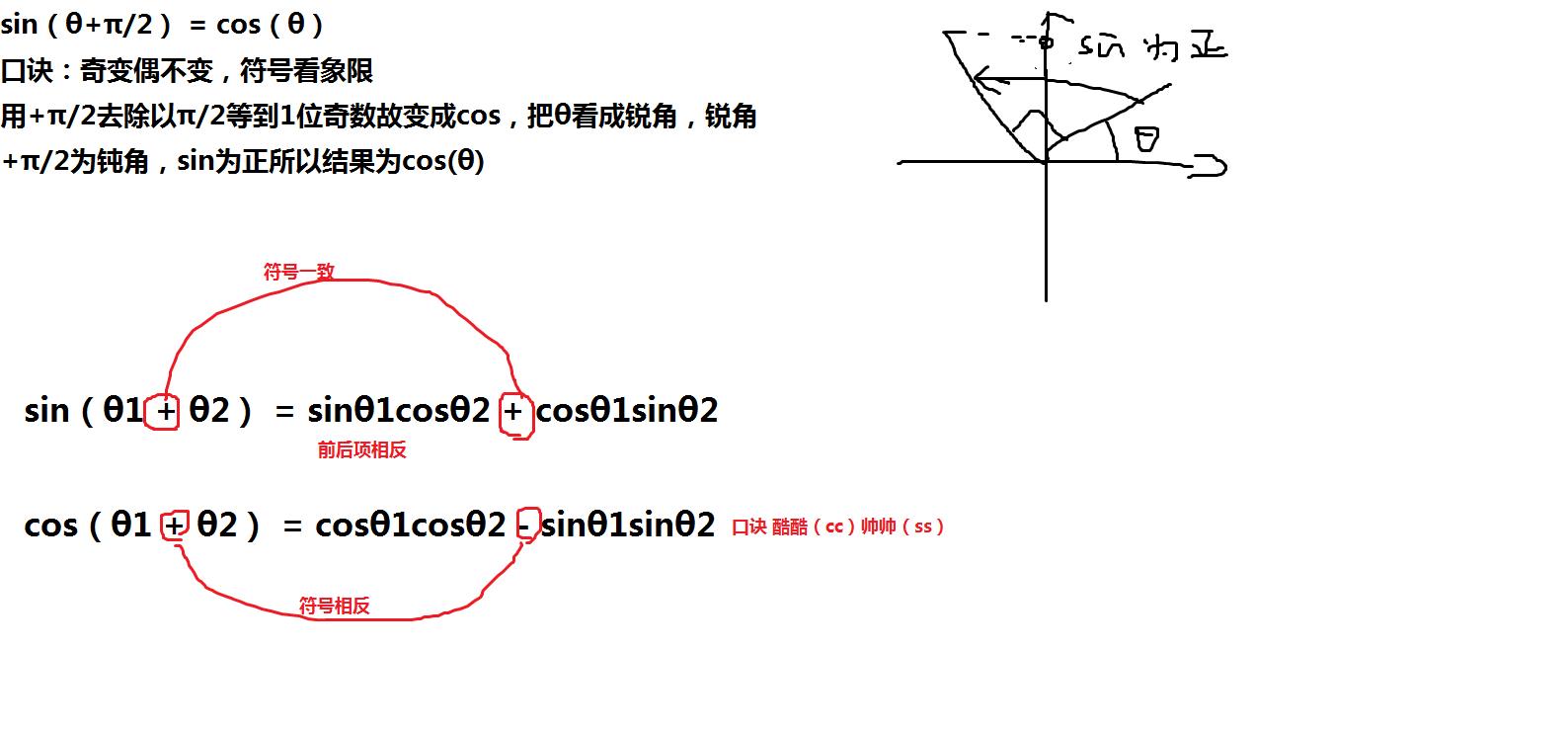
iii.三角恒等变化
iV. //加粗为向量
I.有如下向量P1(x1,y1) P2(x2,y2)
U = P1 - P2 = (x2-x1,y2-y2) = <ux,uy> (ux,uy为分量)
(terminal point - initial point)
II.向量长度即为范数||U||表示
III.计算单位向量 n\' = n / ||n||
IV.向量加法用平行四边形法则
V.向量减法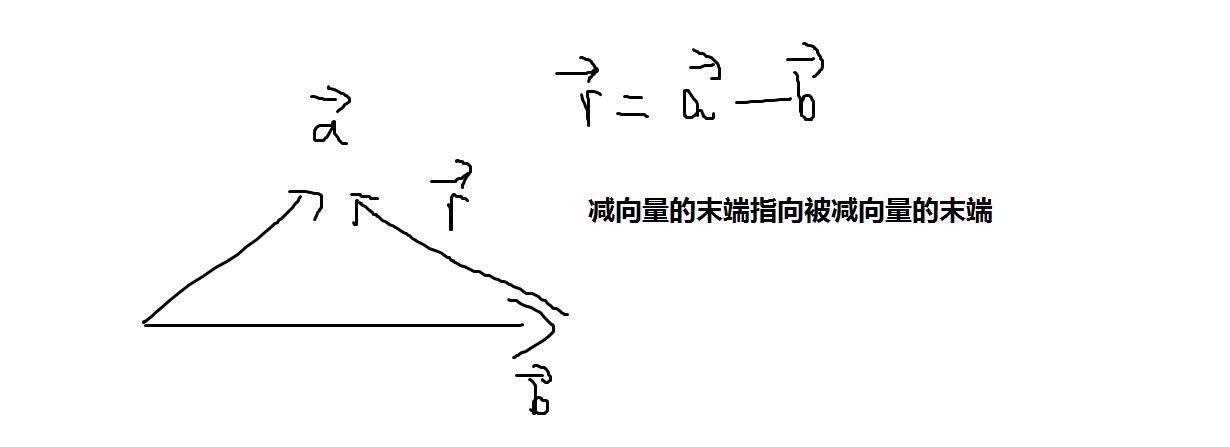
V.dot production

可以看出向量点乘是一个标量
应用:使用点乘可以计算出例如:物体A运动轨迹a,物体B运动轨迹b,求a在b上投影:
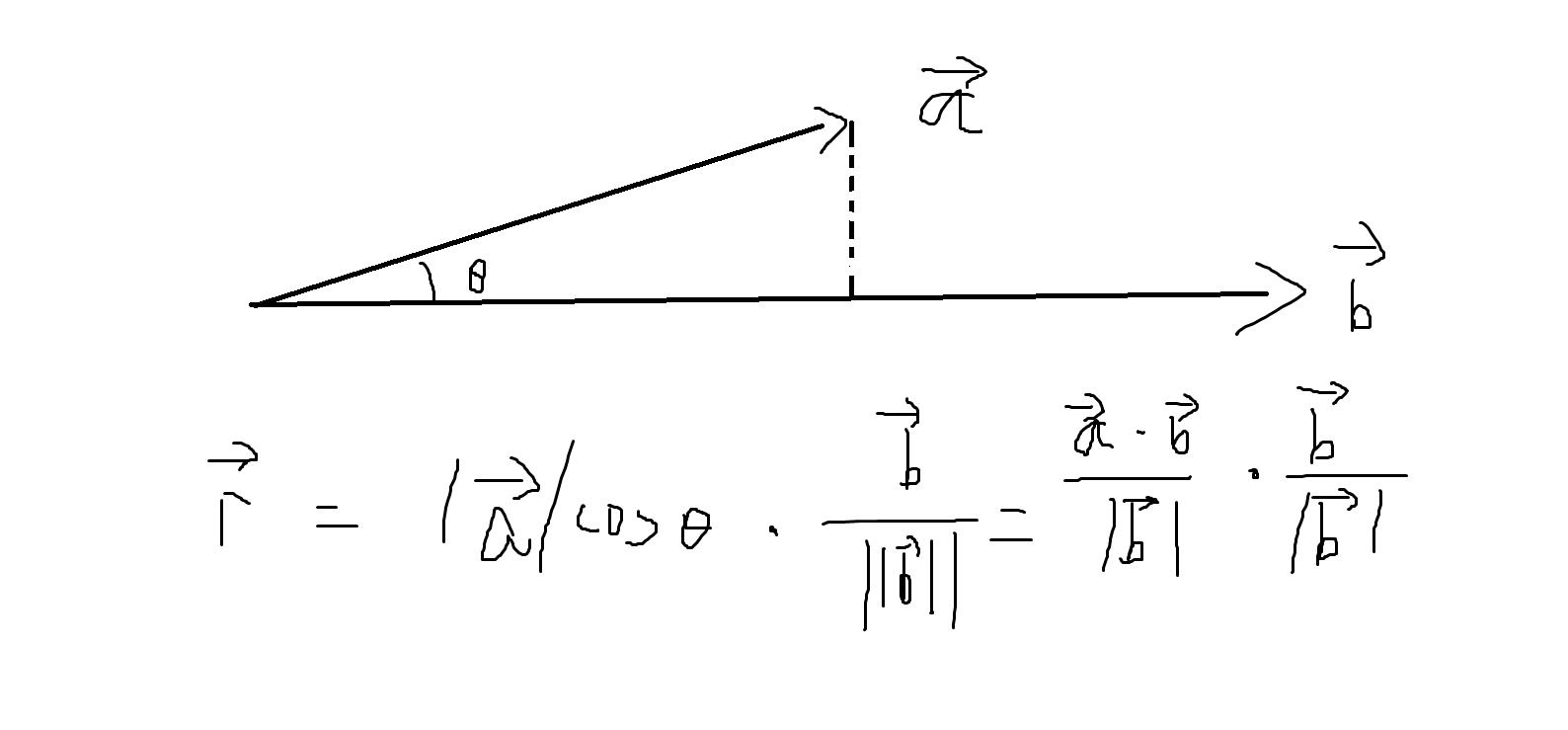 (要求:一看到这种式子就应马上想到投影)
(要求:一看到这种式子就应马上想到投影)
Vi.cross production
 (n为u和v构成平面的单位法向量,θ为uv两向量夹角)
(n为u和v构成平面的单位法向量,θ为uv两向量夹角)
计算n方法
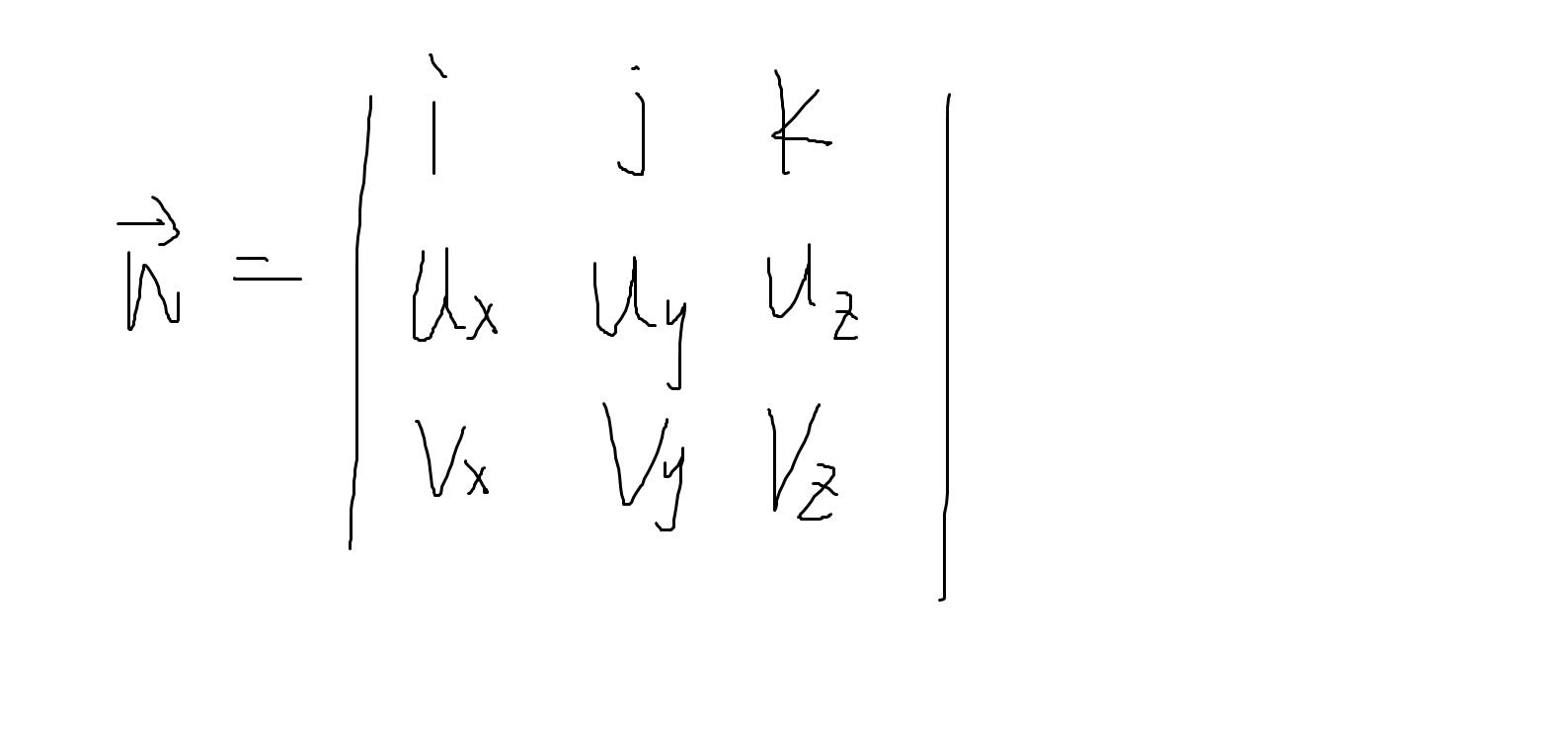 等号右边为行列式,它的值即为n向量(i<1,0,0>,j<0,1,0>,k<0,0,1>为x,y,z轴上的单位向量)
等号右边为行列式,它的值即为n向量(i<1,0,0>,j<0,1,0>,k<0,0,1>为x,y,z轴上的单位向量)
今天内容就到这里,还有下集,欢迎指正和吐槽!XDDD
以上是关于三角学,向量,矩阵和四元数(上)的主要内容,如果未能解决你的问题,请参考以下文章