POJ1228 Grandpa's Estate 稳定凸包
Posted 逐雪
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了POJ1228 Grandpa's Estate 稳定凸包相关的知识,希望对你有一定的参考价值。
转自http://www.cnblogs.com/xdruid/archive/2012/06/20/2555536.html
这道题算是很好的一道凸包的题吧,做完后会加深对凸包的理解。
题意很关键。。。这英语看了好几遍才差不多看明白了。意思就是给你一堆点,这堆点本来就是某个凸包上的部分点,问你这堆点是否能确定唯一的凸包(大概这意思吧。。。)。后来搜了一下,发现这种凸包叫做稳定凸包。
首先来了解什么是稳定的凸包。比如有4个点:
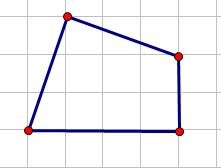 这四个点是某个凸包上的部分点,他们连起来后确实还是一个凸包。但是原始的凸包可能不是这样。比如:
这四个点是某个凸包上的部分点,他们连起来后确实还是一个凸包。但是原始的凸包可能不是这样。比如: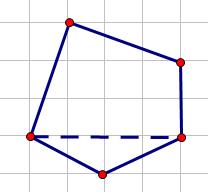
即这四个点构成的凸包不算做“稳定”的。我们发现,当凸包上存在一条边上的点只有端点两个点的时候,这个凸包不是稳定的,因为它可以在这条边外再引入一个点,构成一个新的凸包。但一旦一条边上存在三个点,那么不可能再找到一个点使它扩展成一个新的凸包,否则构成的新多边形将是凹的。
下面是一个典型的稳定凸包:
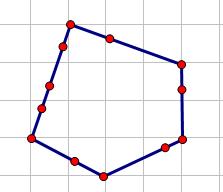
那么这道题的做法终于明确了。即求出给定这堆点的新的凸包,然后判断凸包上的每条边上是否至少有3个点存在,假如有一条边不符合条件,则输出NO。否则YES。
写的时候又遇到几个小问题了。。。一个是要修改一下凸包模板,大多数人的模板都是不包括共线点的。然后,如果输入的点数n小于6,那么直接输出NO。当然,也可以直接按极角排序进行比较。至于判断一条边上是否至少有三个点,我是这样做的,假设要判断的边i,那么判断边i和边i-1,边i和边i+1的夹角是否都为0(180)。
#include<iostream> #include<stdio.h> #include<stdlib.h> #include<string.h> #include<math.h> #include<algorithm> #include<queue> #include<vector> using namespace std; const double eps=1e-9; int cmp(double x) { if(fabs(x)<eps)return 0; if(x>0)return 1; else return -1; } const double pi=acos(-1.0); inline double sqr(double x) { return x*x; } struct point { double x,y; point (){} point (double a,double b):x(a),y(b){} void input() { scanf("%lf%lf",&x,&y); } friend point operator +(const point &a,const point &b) { return point(a.x+b.x,a.y+b.y); } friend point operator -(const point &a,const point &b) { return point(a.x-b.x,a.y-b.y); } friend bool operator ==(const point &a,const point &b) { return cmp(a.x-b.x)==0&&cmp(a.y-b.y)==0; } friend point operator *(const point &a,const double &b) { return point(a.x*b,a.y*b); } friend point operator*(const double &a,const point &b) { return point(a*b.x,a*b.y); } friend point operator /(const point &a,const double &b) { return point(a.x/b,a.y/b); } double norm() { return sqrt(sqr(x)+sqr(y)); } }; struct line { point a,b; line(){}; line(point x,point y):a(x),b(y) { } }; double det(const point &a,const point &b) { return a.x*b.y-a.y*b.x; } double dot(const point &a,const point &b) { return a.x*b.x+a.y*b.y; } double dist(const point &a,const point &b) { return (a-b).norm(); } point rotate_point(const point &p,double A) { double tx=p.x,ty=p.y; return point(tx*cos(A)-ty*sin(A),tx*sin(A)+ty*cos(A)); } bool parallel(line a,line b) { return !cmp(det(a.a-a.b,b.a-b.b)); } bool line_joined(line a,line b,point &res) { if(parallel(a,b))return false; double s1=det(a.a-b.a,b.b-b.a); double s2=det(a.b-b.a,b.b-b.a); res=(s1*a.b-s2*a.a)/(s1-s2); return true; } bool pointonSegment(point p,point s,point t) { return cmp(det(p-s,t-s))==0&&cmp(dot(p-s,p-t))<=0; } void PointProjLine(const point p,const point s,const point t,point &cp) { double r=dot((t-s),(p-s))/dot(t-s,t-s); cp=s+r*(t-s); } struct polygon_convex { vector<point>P; polygon_convex(int Size=0) { P.resize(Size); } }; bool comp_less(const point &a,const point &b) { return cmp(a.x-b.x)<0||cmp(a.x-b.x)==0&&cmp(a.y-b.y)<0; } polygon_convex convex_hull(vector<point> a) { polygon_convex res(2*a.size()+5); sort(a.begin(),a.end(),comp_less); a.erase(unique(a.begin(),a.end()),a.end());//删去重复点 int m=0; //cout<<a.size()<<endl; for(int i=0;i<a.size();i++) { while(m>1&&cmp(det(res.P[m-1]-res.P[m-2],a[i]-res.P[m-2]))<0)--m; res.P[m++]=a[i]; } int k=m; for(int i=int(a.size())-2;i>=0;--i) { while(m>k&&cmp(det(res.P[m-1]-res.P[m-2],a[i]-res.P[m-2]))<0)--m; res.P[m++]=a[i]; } res.P.resize(m); if(a.size()>1)res.P.resize(m-1); return res; } bool is_convex(vector<point> &a) { for(int i=0;i<a.size();i++) { int i1=(i+1)%int(a.size()); int i2=(i+2)%int(a.size()); int i3=(i+3)%int(a.size()); if((cmp(det(a[i1]-a[i],a[i2]-a[i1]))*cmp(det(a[i2]-a[i1],a[i3]-a[i2])))<0) return false; } return true; } int containO(const polygon_convex &a,const point &b) { int n=a.P.size(); point g=(a.P[0]+a.P[n/3]+a.P[2*n/3])/3.0; int l=0,r=n; while(l+1<r) { int mid=(l+r)/2; if(cmp(det(a.P[l]-g,a.P[mid]-g))>0) { if(cmp(det(a.P[l]-g,b-g))>=0&&cmp(det(a.P[mid]-g,b-g))<0)r=mid; else l=mid; }else { if(cmp(det(a.P[l]-g,b-g))<0&&cmp(det(a.P[mid]-g,b-g))>=0)l=mid; else r=mid; } } r%=n; int z=cmp(det(a.P[r]-b,a.P[l]-b))-1; if(z==-2)return 1; return z; } bool circle_in_polygon(point cp,double r,polygon_convex &pol) { polygon_convex pp=convex_hull(pol.P); if(containO(pp,cp)!=1)return false; for(int i=0;i<pol.P.size();i++) { int j; if(i<pol.P.size()-1)j=i+1; else j=0; point prol; PointProjLine(cp,pol.P[i],pol.P[j],prol); double dis; if(pointonSegment(prol,pol.P[i],pol.P[j]))dis=dist(prol,cp); else dis=min(dist(cp,pol.P[i]),dist(pol.P[j],cp)); if(cmp(dis-r)==-1)return false; } return true; } const int maxn=1e+6; point po[maxn+10]; double area(point a[],int n) { double sum=0; a[n]=a[0]; for(int i=0;i<n;i++) sum+=det(a[i+1],a[i]); return sum/2.; } int Point_in(point a[],int n,point t) { int num=0,i,d1,d2,k; a[n]=a[0]; for(int i=0;i<n;i++) { if(pointonSegment(t,a[i],a[i+1]))return 2; k=cmp(det(a[i+1]-a[i],t-a[i])); d1=cmp(a[i].y-t.y); d2=cmp(a[i+1].y-t.y); if(k>0&&d1<=0&&d2>0)num++; if(k<0&&d2<=0&&d1>0)num--; } return num!=0; } point pp[100]; int GCD(int a,int b)//Euclid { return b==0?a:GCD(b,a%b); } int Border_point_num(point a[],int n) { int num=0; a[n]=a[0]; for(int i=0;i<n;i++) num+=GCD(abs(int(a[i+1].x-a[i].x)),abs(int(a[i+1].y-a[i].y))); return num; } int Inside_point_num(point a[],int n) { return int(-area(a,n))+1-Border_point_num(a,n)/2; } vector<point> p; int main() {freopen("t.txt","r",stdin); int T; scanf("%d",&T); while(T--) { p.clear(); int n; scanf("%d",&n); p.resize(n); for(int i=0;i<n;i++) p[i].input(); if(n<6){printf("NO\\n");continue;} polygon_convex pc=convex_hull(p); int i=0; bool flag=true; pc.P.push_back(pc.P[0]); while(i<pc.P.size()-1&&flag) { flag=false; if(i+2>=pc.P.size())break; point p1=pc.P[i],p2=pc.P[i+1],p3=pc.P[i+2]; if(cmp(det(p2-p1,p3-p2))==0)flag=true; else break; i=i+3; while((cmp(det(p2-p1,pc.P[i]-p2))==0)&&i<pc.P.size())i++; i--; } if(flag)printf("YES\\n"); else printf("NO\\n"); } return 0; }
以上是关于POJ1228 Grandpa's Estate 稳定凸包的主要内容,如果未能解决你的问题,请参考以下文章
POJ 1228 Grandpa's Estate [稳定凸包]
Grandpa's Estate---POJ1228(凸包)