多自由度机械臂模拟5
Posted herd
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了多自由度机械臂模拟5相关的知识,希望对你有一定的参考价值。
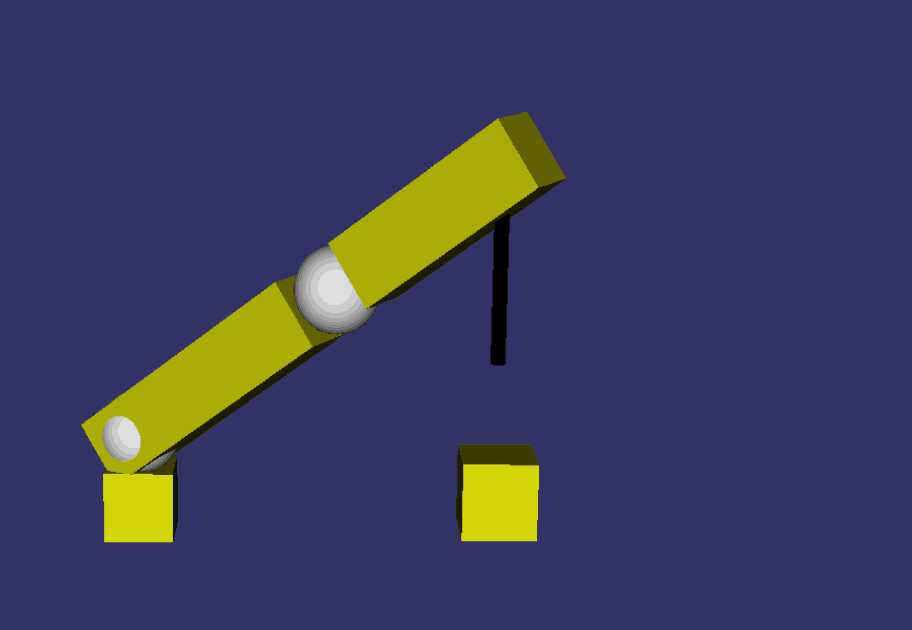
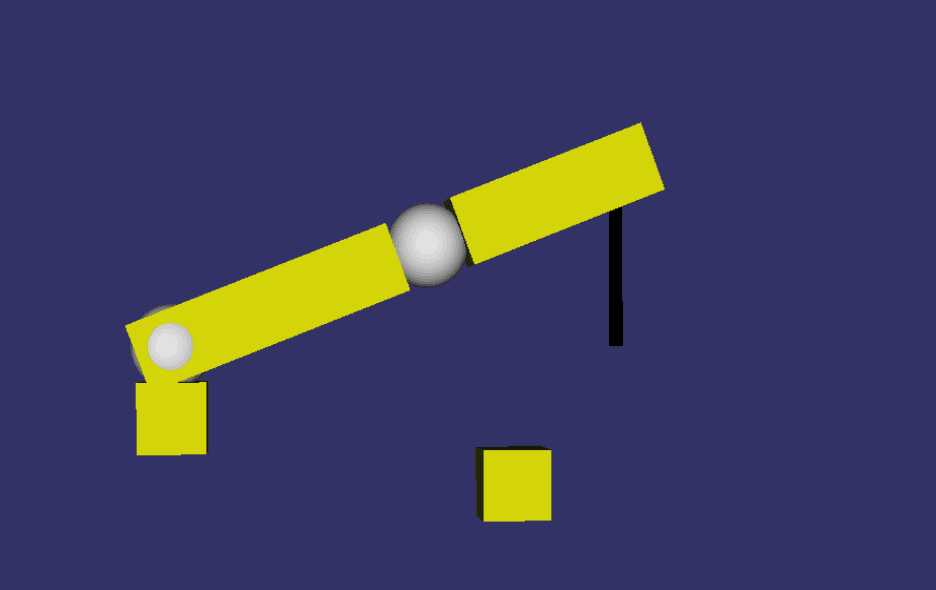
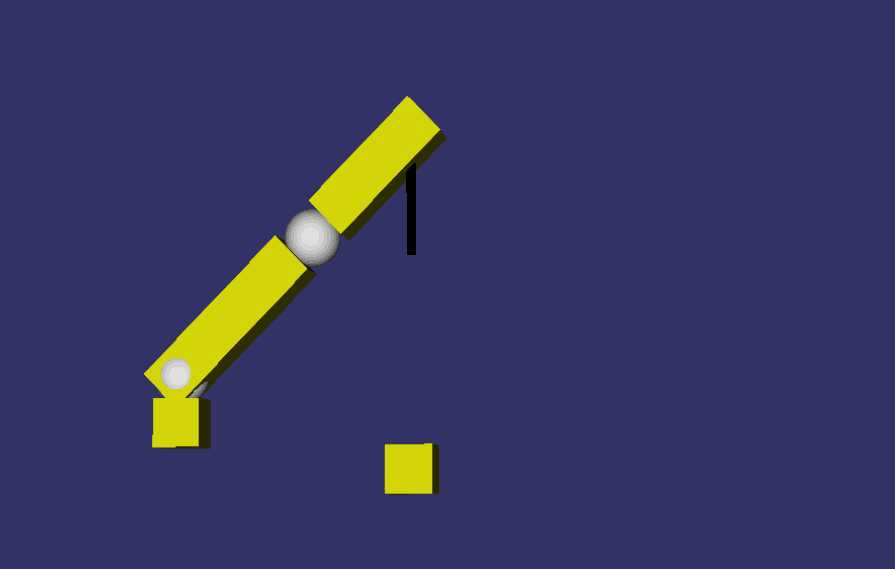
机械臂-起臂动作模拟
double cAngle = calaulateCAngle(); std::cout << "rorate cAngle:" << cAngle << std::endl; for (double d1=0.0;d1<cAngle;d1+=2.0) if (cAngle-d1>2.0) rorate3 += 2.0; rotateRope = -2.0; else double d_1 = cAngle - d1; rorate3 += d_1; rotateRope = -d_1; rotate3(); rotateRope1(); printHookPosition(); OpenThreads::Thread::microSleep(1 * 50000); viewer1->frame();
以上是关于多自由度机械臂模拟5的主要内容,如果未能解决你的问题,请参考以下文章