somebot机械臂安装说明书-v0.4
Posted somebot
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了somebot机械臂安装说明书-v0.4相关的知识,希望对你有一定的参考价值。

【somebot】玩转四自由度机械臂
博主QQ:1356438802
somebot技术交流QQ群:1060139739
somebot机械臂资料下载及安装视频教程:
链接:https://pan.baidu.com/s/1TO9_MCkITVnz74NBIjUfAQ
提取码:ihci
0. 须知
- 所有的亚克力零件厚度为3mm规格。
- 机械臂所有关节处不要拧太紧,应让它可以自由活动,否则舵机转动时阻力太大会导致Arduino重启。
- 切勿手动蛮力转动舵机臂,否则会导致舵机损坏。
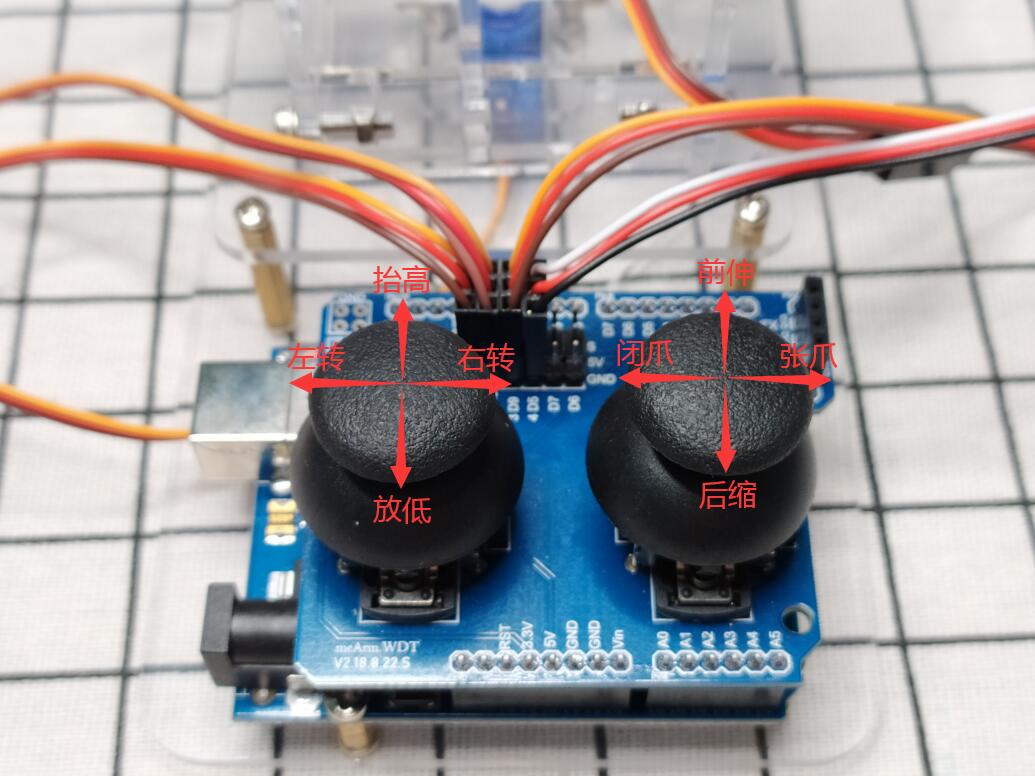
- 组装完成后的机械臂基座舵机、左臂舵机、右臂舵机、爪子舵机,分别接在摇杆控制板的D11 / D10 / D9 / D5 舵机接口。
1. 底座的组装
该部分安装所需要的零件如下,
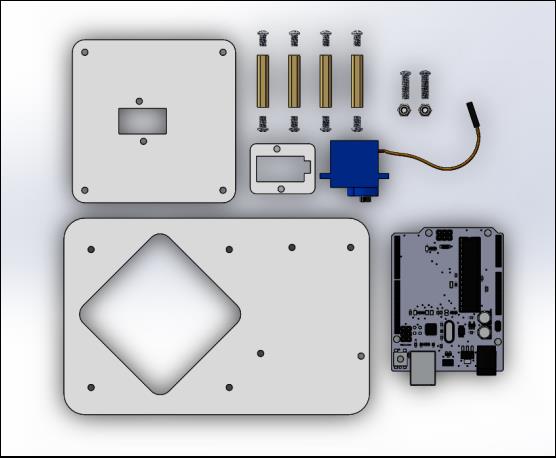
| 种类 | 数量 |
| 20mm铜柱 | 4 |
| M3×12mm螺丝 | 2 |
| M3×6mm螺丝 | 8 |
| M3普通螺母 | 2 |
| SG90舵机 | 1 |
| 亚克力板 | 3 |
| Arduino UNO R3主板 | 1 |
| 遥控板 | 1 |
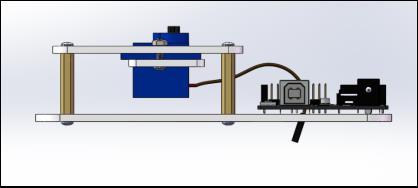
底座安装效果图如下,

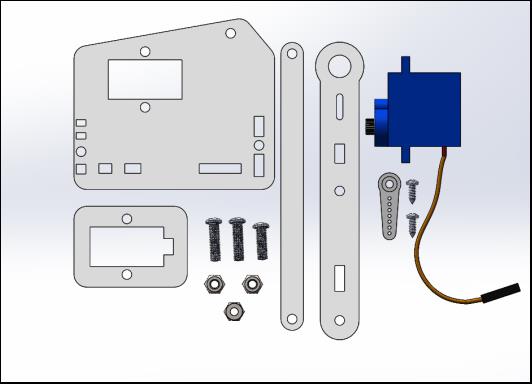
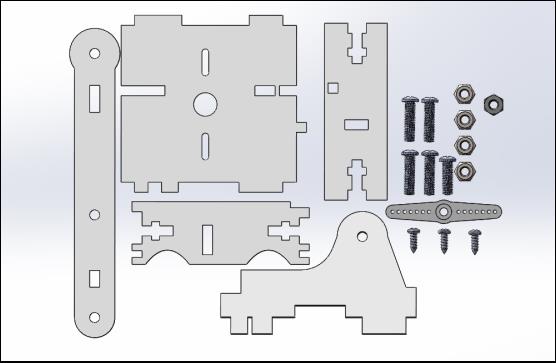
2. 左臂的组装
该部分的安装需要以下零件,
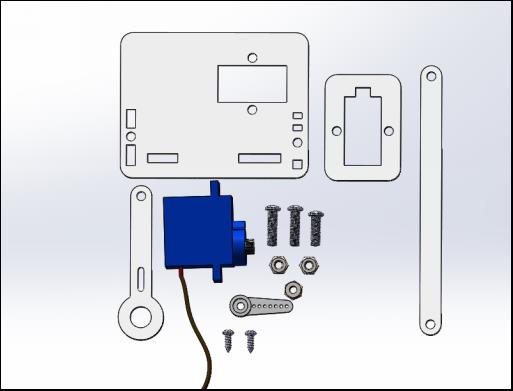
| 种类 | 数量 |
| M3×12mm螺丝 | 2 |
| M3×10mm螺丝 | 1 |
| M1.5×6mm自攻螺丝 | 2 |
| M3普通螺母 | 2 |
| M3自锁螺母 | 1 |
| SG90舵机 | 1 |
| 舵机单臂 | 1 |
| 亚克力板 | 4 |
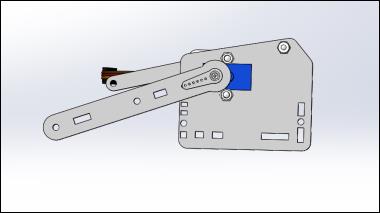
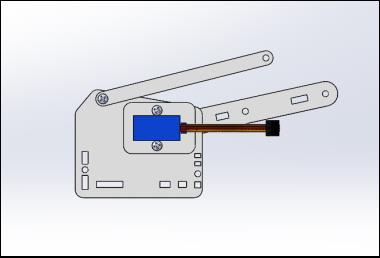
该步骤需要调整舵机角度,先为舵机安装上舵机臂,将Arduino板和遥控板装好后通电,舵机线插在D11舵机接口,推动左摇杆左右运动,让舵机顺时钟转到不能动,如下图(1)所示,然后逆时针转到不能动,如下图(2)所示。
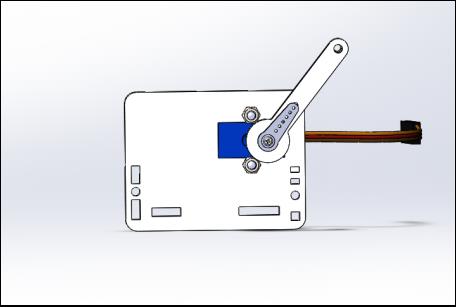
图(1)顺时针转到头
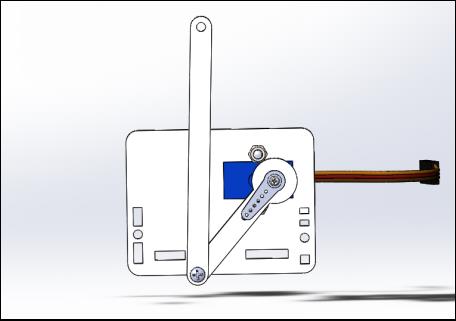
图(2)逆时针转到头
3. 右臂的组装
该部分需要以下零件,
| 种类 | 数量 |
| M3×12mm螺丝 | 2 |
| M3×10mm螺丝 | 1 |
| M1.5×6mm自攻螺丝 | 2 |
| M3普通螺母 | 2 |
| M3自锁螺母 | 1 |
| SG90舵机 | 1 |
| 舵机单臂 | 1 |
| 亚克力板 | 4 |
该步骤也需要调整舵机角度,先为舵机安装上舵机臂,将Arduino板和遥控板装好后通电,舵机线插在D11舵机接口,推动左摇杆左右运动,让舵机顺时钟转到不能动,如下图(1)所示,然后逆时针转到不能动,如下图(2)图所示。
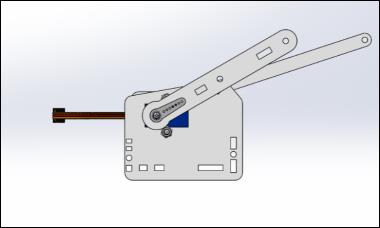
图(1)顺时针转到头
图(2)逆时针转到头
图(3)反面
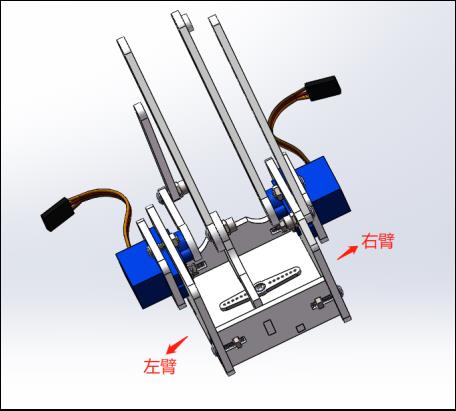
4. 底板的安装
该部分需要以下零件,
| 种类 | 数量 |
| M3×12mm螺丝 | 4 |
| M3×10mm螺丝 | 1 |
| M1.5×6mm自攻螺丝 | 3 |
| M3普通螺母 | 4 |
| M3自锁螺母 | 1 |
| SG90舵机 | 1 |
| 舵机双臂 | 1 |
| 亚克力板 | 5 |
底板与左右两臂的安装效果图如下,

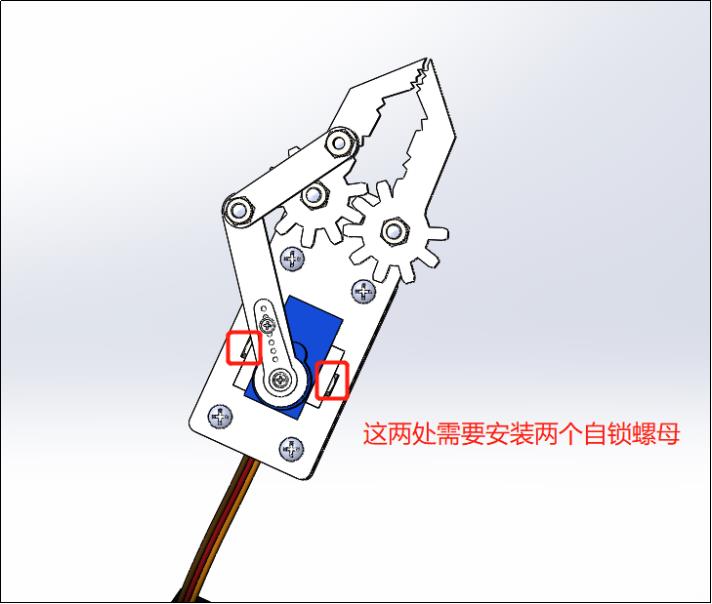
5. 支持板的安装
该部分需要以下零件,

| 种类 | 数量 |
| M3×12mm螺丝 | 2 |
| M3普通螺母 | 2 |
| 亚克力板 | 1 |
安装效果图如下,

6. 爪子的组装
爪子由以下部分组成,

| 种类 | 数量 |
| M3×16mm螺丝 | 1 |
| M3×12mm螺丝 | 4 |
| M3×10mm螺丝 | 3 |
| M1.5×6mm自攻螺丝 | 3 |
| M3普通螺母 | 4 |
| M3自锁螺母 | 4 |
| SG90舵机 | 1 |
| 舵机双臂 | 1 |
| 亚克力板 | 8 |
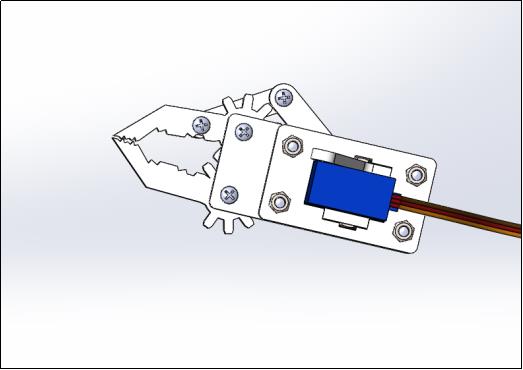
爪子舵机线插在D11舵机接口,推动左摇杆左右运动,应使舵机顺时钟转到不能动,如下图所示,

爪子合拢效果如下,
注意:若爪子不能正常开合,有两种情况,一是螺丝拧太紧了,二是舵机角度调试出现了问题,切记不要手动蛮力转动舵机臂,否则会导致舵机损坏。
7. 整体组装
需要零件如下,

| 种类 | 数量 |
| M3×16mm螺丝 | 2 |
| M3×12mm螺丝 | 1 |
| M3×10mm螺丝 | 5 |
| M3自锁螺母 | 6 |
| 亚克力板 | 5 |
安装效果图如下,

以上是关于somebot机械臂安装说明书-v0.4的主要内容,如果未能解决你的问题,请参考以下文章