多自由度机械臂模拟6
Posted herd
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了多自由度机械臂模拟6相关的知识,希望对你有一定的参考价值。
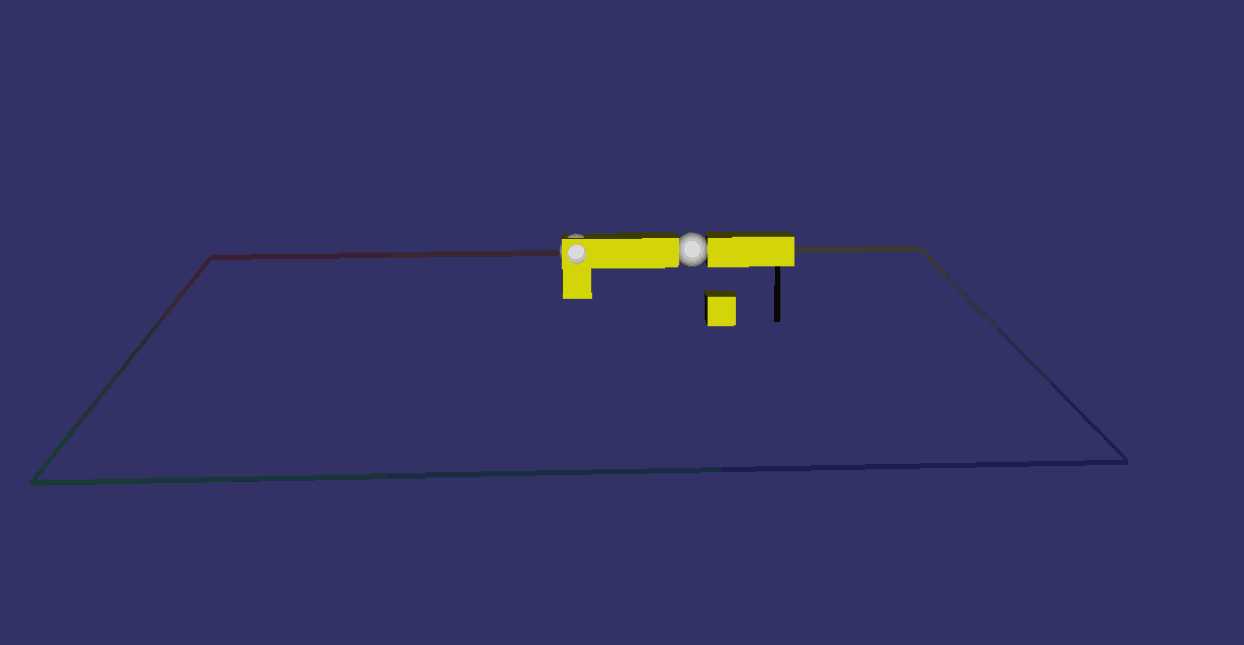
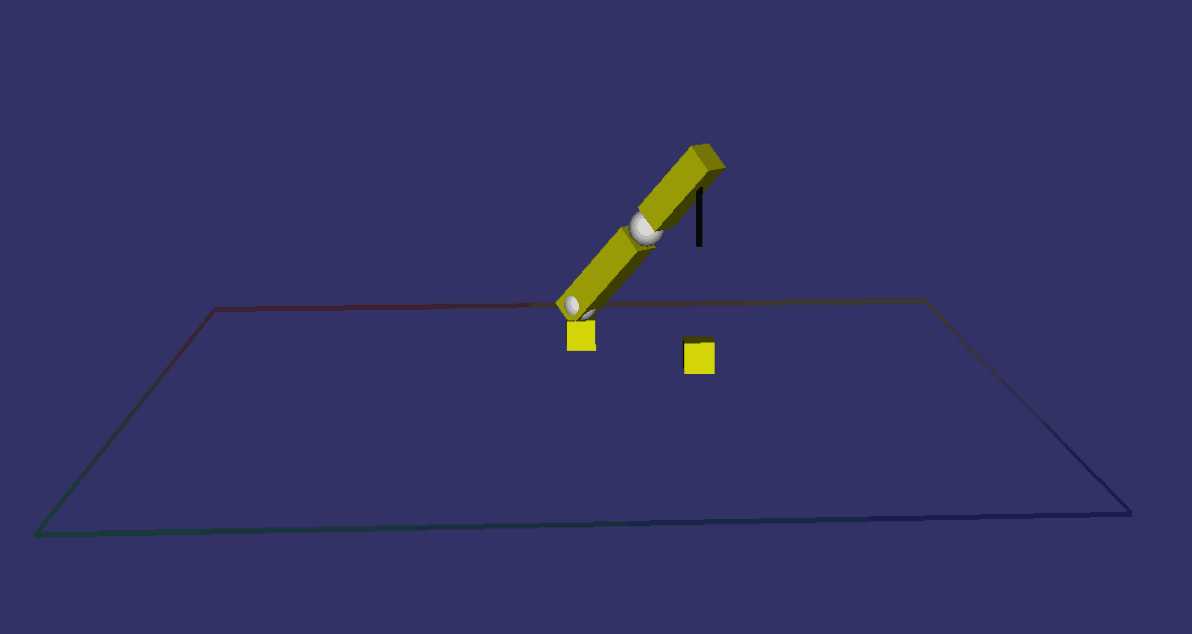
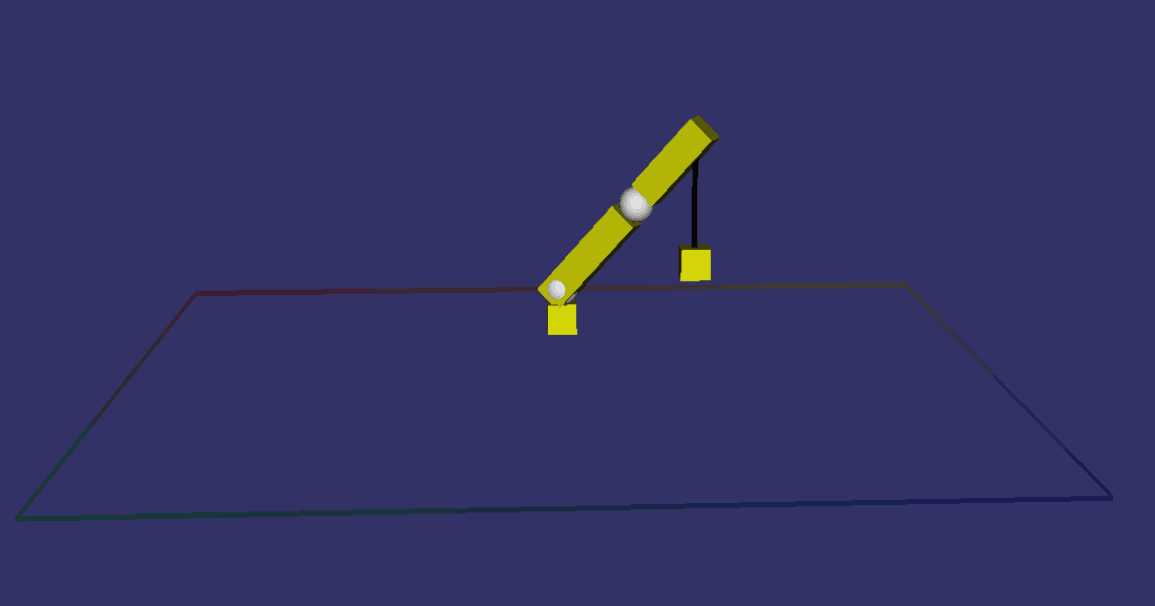
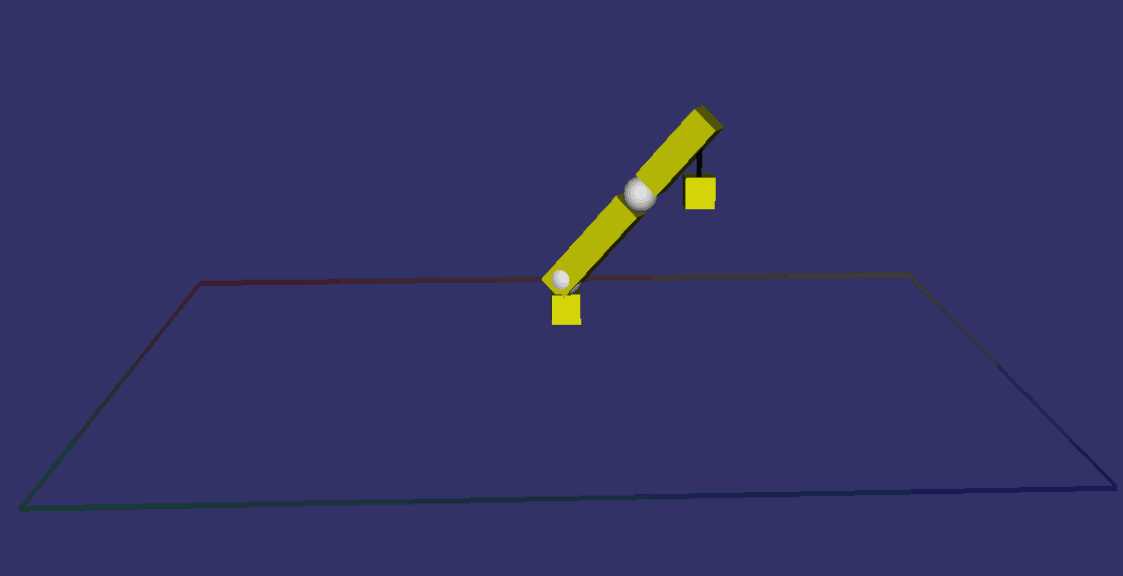
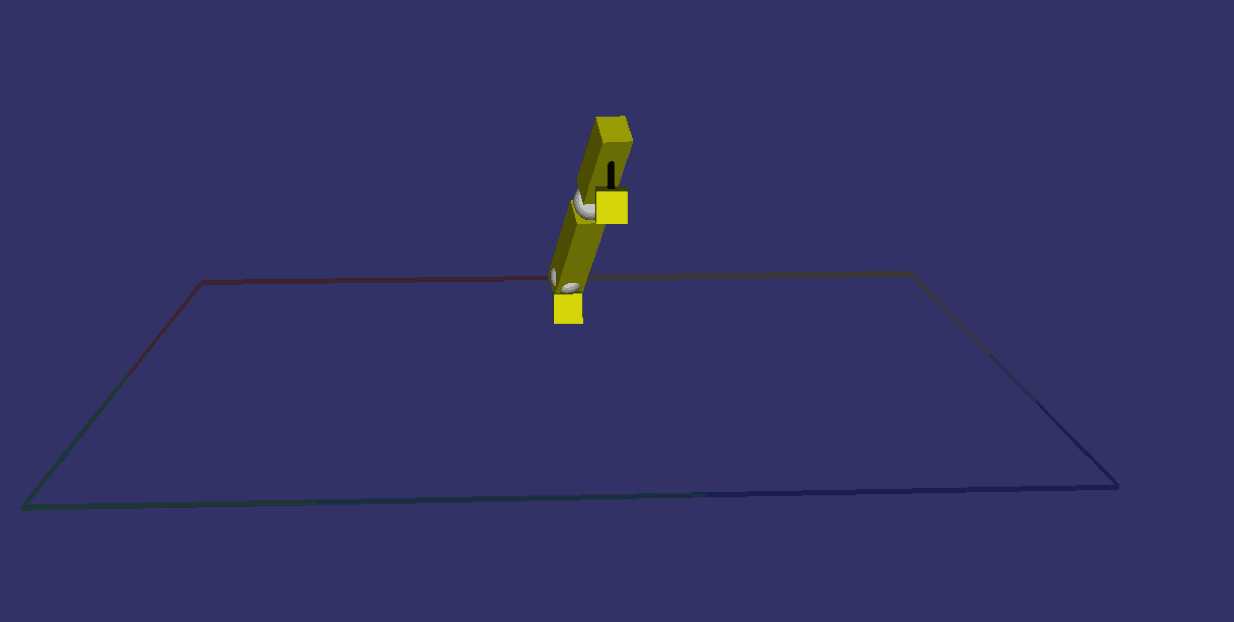
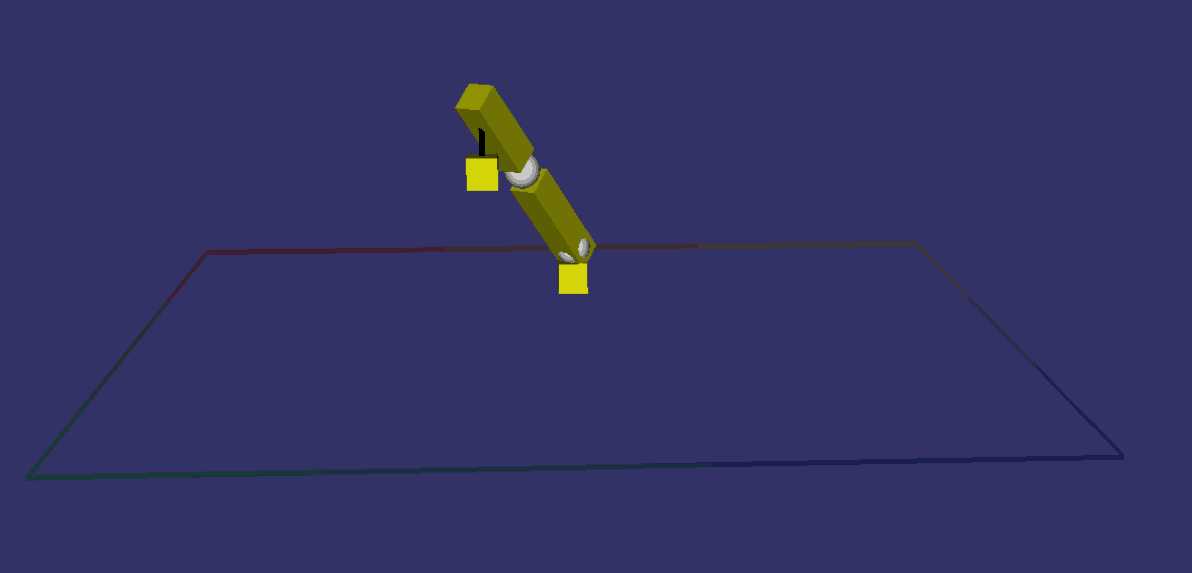
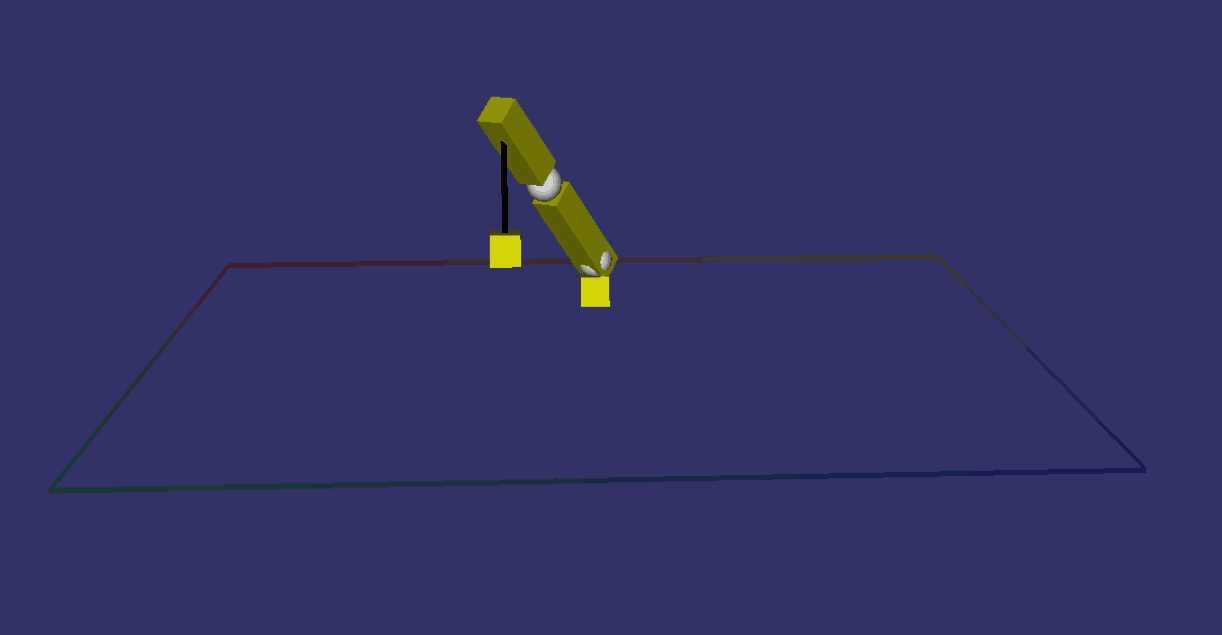
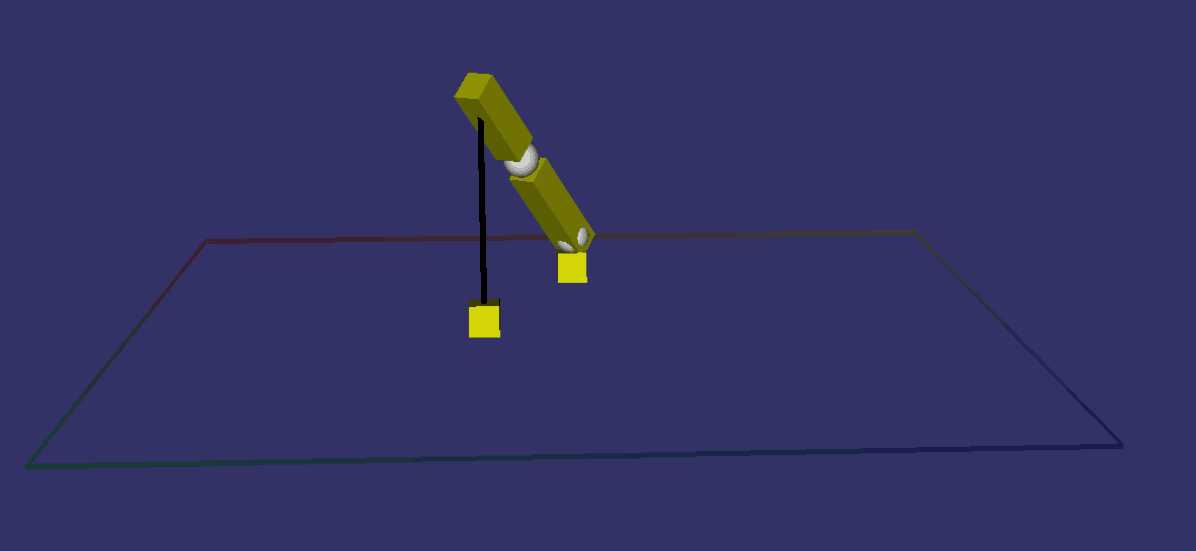
模拟一个完整的吊装流程,初始状态->起臂->放下吊绳->竖直起吊->水平旋转->放下物体->收缩吊绳。
osg::ref_ptr<osg::Node> createSimple() osg::ref_ptr<osg::Geode> geode = new osg::Geode; osg::ref_ptr<osg::Geometry> geo = new osg::Geometry; //申请一些顶点 osg::ref_ptr<osg::Vec3Array> vers = new osg::Vec3Array; geo->setVertexArray(vers.get()); #if 1 geo->addPrimitiveSet(new osg::DrawArrays(osg::PrimitiveSet::LINE_LOOP, 0, 4));//创建一个线圈 #else geo->addPrimitiveSet(new osg::DrawArrays(osg::PrimitiveSet::QUADS, 0, 4));//创建一个正方形 #endif //设置顶点 vers->push_back(osg::Vec3(-15, 3.0, -15)); vers->push_back(osg::Vec3(15, 3.0, -15)); vers->push_back(osg::Vec3(15, 3.0, 15)); vers->push_back(osg::Vec3(-15, 3.0, 15)); //申请颜色 osg::ref_ptr<osg::Vec4Array> color = new osg::Vec4Array(); color->push_back(osg::Vec4(1.0, 0.0, 0.0, 0.5)); color->push_back(osg::Vec4(0.0, 1.0, 0.0, 0.5)); color->push_back(osg::Vec4(0.0, 0.0, 1.0, 0.5)); color->push_back(osg::Vec4(1.0, 1.0, 0.0, 0.5)); //设置颜色 geo->setColorArray(color.get()); geo->setColorBinding(osg::Geometry::AttributeBinding::BIND_PER_VERTEX);//设置颜色绑定 //设置法线,正对屏幕的时候最亮 osg::ref_ptr<osg::Vec3Array> norm = new osg::Vec3Array; geo->setNormalArray(norm); geo->setNormalBinding(osg::Geometry::AttributeBinding::BIND_OVERALL); norm->push_back(osg::Vec3(0.0, -1.0, 0.0)); //打开透明度 geo->getOrCreateStateSet()->setMode(GL_BLEND, osg::StateAttribute::ON); //设置线宽 osg::ref_ptr<osg::LineWidth> w = new osg::LineWidth; w->setWidth(5.0); geo->getOrCreateStateSet()->setAttributeAndModes(w.get(), osg::StateAttribute::ON); geode->addDrawable(geo.get()); return geode;
//代码参考:https://blog.csdn.net/wb175208/article/details/80513775
以上是关于多自由度机械臂模拟6的主要内容,如果未能解决你的问题,请参考以下文章