六自由度机械臂项目学习笔记
Posted longyuan-z
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了六自由度机械臂项目学习笔记相关的知识,希望对你有一定的参考价值。
由于课程要做一个控制六自由度机械臂的项目,主要是学习舵机和舵机控制的知识,在这里做一下学习笔记。
使用的舵机为2个DS3115MG数字舵机+4个MG996R模拟舵机。
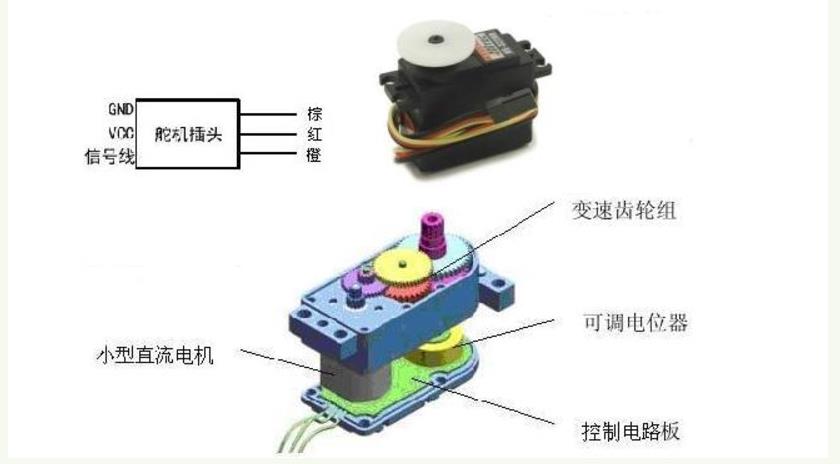
1.舵机基本构造
2.舵机控制原理
控制电路板接受来自信号线的控制信号,控制电机转动,电机带动一系列齿轮组,减速后传动至输出舵盘。舵机的输出轴和位置反馈电位计是相连的,舵盘转动的同时,带动位置反馈电位计,电位计将输出一个电压信号到控制电路板,进行反馈,然后控制电路板根据所在位置决定电机转动的方向和速度,从而达到目标停止。其工作流程为:控制信号→控制电路板→电机转动→齿轮组减速→舵盘转动→位置反馈电位计→控制电路板反馈。
舵机的控制信号周期为20MS的脉宽调制(PWM)信号,其中脉冲宽度从0.5-2.5MS,相对应的舵盘位置为0-180度,呈线性变化。也就是说,给他提供一定的脉宽,它的输出轴就会保持一定对应角度上,无论外界转矩怎么改变,直到给它提供一个另外宽度的脉冲信号,它才会改变输出角度到新的对应位置上如图7所求。舵机内部有一个基准电路,产生周期为20MS,宽度1.5MS的基准信号,有一个比出较器,将外加信号与基准信号相比较,判断出方向和大小,从而生产电机的转动信号。由此可见,舵机是一种位置伺服驱动器,转动范围不能超过180度,适用于那些需要不断变化并可以保持的驱动器中,比如说机器人的关节、飞机的舵面等。
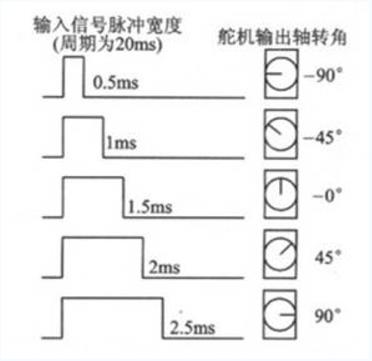
舵机输出转角与输入脉冲的关系
控制过程图:

3.舵机使用注意事项
1、常用舵机的额定工作电压为6V,可以使用LM1117等芯片提供6V的电压,如果为了简化硬件上的设计直接使用5V的供电影响也不是很大,但最好和单片机进行分开供电,否则会造成单片机无法正常工作。
2、一般来说可以将来信号线连接至单片机的任意引脚,对于51单片机需通过定时器模块出PWM才能进行控制。但是如果连接像飞思卡尔之类的芯片,由于飞思卡尔内部带有PWM模块,可以直接输出PWM信号,此时应将来信号连于专用的PWM输出引脚上。
3、数字舵机一般要与供电电路、控制电路三者共地,模拟舵机单独供电即可。
4.数字舵机和模拟舵机的差别
数字舵机(Digital Servo)和模拟舵机(Analog Servo)在基本的机械结构方面是完全一样的,主要由马达、减速齿轮、控制电路等组成,而数字舵机和模拟舵机的最大区别则体现在控制电路上,数字舵机的控制电路比模拟舵机的多了微处理器和晶振。不要小看这一点改变,它对提高舵机的性能有着决定性的影响。数字舵机在以下两点与模拟舵机不同:
1.处理接收机的输入信号的方式。
2.控制舵机马达初始电流的方式,减少无反应区(对小量信号无反应的控制区域),增加分辨率以及产生更大的固定力量。
模拟舵机在空载时,没有动力被传到舵机马达。当有信号输入使舵机移动,或者舵机的摇臂受到外力的时候,舵机会作出反应,向舵机马达传动动力(电压)。这种动力实际上每秒传递50次,被调制成开/关脉冲的最大电压,并产生小段小段的动力。当加大每一个脉冲的宽度的时候,如电子变速器的效能就会出现,直到最大的动力/电压被传送到马达,马达转动使舵机摇臂指到一个新的位置。然后,当舵机电位器告诉电子部分它已经到达指定的位置,那么动力脉冲就会减小脉冲宽度,并使马达减速。直到没有任何动力输入,马达完全停止。
模拟舵机的“缺点”是:假设一个短促的动力脉冲,紧接着很长的停顿,并不能给马达施加多少激励,使其转动。这意味着如果有一个比较小的控制动作,舵机就会发送很小的初始脉冲到马达,这是非常低效率的。这也是为什么模拟舵机有“无反应区”的存在。比如说,舵机对于发射机的细小动作,反应非常迟钝,或者根本就没有反应。
相对于传统模拟舵机,数字舵机的两个优势是:
1.因为微处理器的关系,数字舵机可以在将动力脉冲发送到舵机马达之前,对输入的信号根据设定的参数进行处理。这意味着动力脉冲的宽度,就是说激励马达的动力,可以根据微处理器的程序运算而调整,以适应不同的功能要求,并优化舵机的性能。
2.数字舵机以高得多的频率向马达发送动力脉冲。就是说,相对与传统的50脉冲/秒,现在是300脉冲/秒。虽然,以为频率高的关系,每个动力脉冲的宽度被减小了,但马达在同一时间里收到更多的激励信号,并转动得更快。这也意味着不仅仅舵机马达以更高的频率响应发射机的信号,而且“无反应区”变小;反应变得更快;加速和减速时也更迅速、更柔和;数字舵机提供更高的精度和更好的固定力量。
但是在把数字舵机设计的更精准的同时,也带来了缺点:
1、数码舵机需要消耗更多的动力。其实这是很自然的。数码舵机以更高频率去修正马达,这一定会增加总体的动力消耗。
2、相对教短的寿命。其实这是很自然的。马达总在转来转去做修正,这一定会增加马达等转动部位的消耗。
5.数字舵机DS3115MG参数

6.模拟舵机MG996R参数
型号:MG996R
产品净重: 55g
产品尺寸: 40.7*19.7*42.9mm
产品拉力: 9.4kg/cm(4.8V), 11kg/cm(6V)
反应速度: 0.17sec/60degree(4.8v) 0.14sec/60degree(6v)
工作电压: 4.8-7.2V
工作温度: 0℃-55℃
齿轮形式: 金属齿轮
工作死区: 5us (微秒)
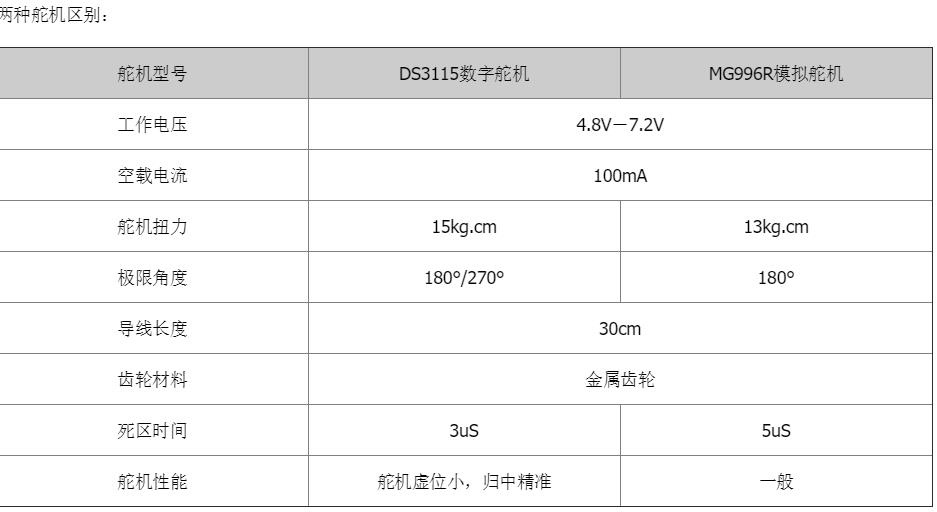
7.DS3115和MG996R的比较
8.机械臂控制器、供电电源及线材配件选择

9.有收获再更新
以上是关于六自由度机械臂项目学习笔记的主要内容,如果未能解决你的问题,请参考以下文章