UR5仿真学习笔记
Posted Sakurazzy
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了UR5仿真学习笔记相关的知识,希望对你有一定的参考价值。
UR5仿真学习笔记
在ROS中完成UR5机械臂的仿真,记录学习过程
仿真环境搭建
安装moveit
参考:Ubuntu 18.04 安装ros-melodic-moveit
moveit官方文档
$ sudo apt-get install ros-melodic-moveit
$ source /opt/ros/melodic/setup.bash
$ sudo apt-get install ros-melodic-moveit-resources
安装UR5驱动
参考:Ubuntu18.04 ROS手眼标定UR5之安装篇
安装了UR驱动包、aruco_ros、vision_visp / visp_hand2eye_calibration、easy_handeye
编译UR驱动包出现了一系列缺少依赖包的问题,参考:UR驱动包安装过程及遇到问题的解决方案
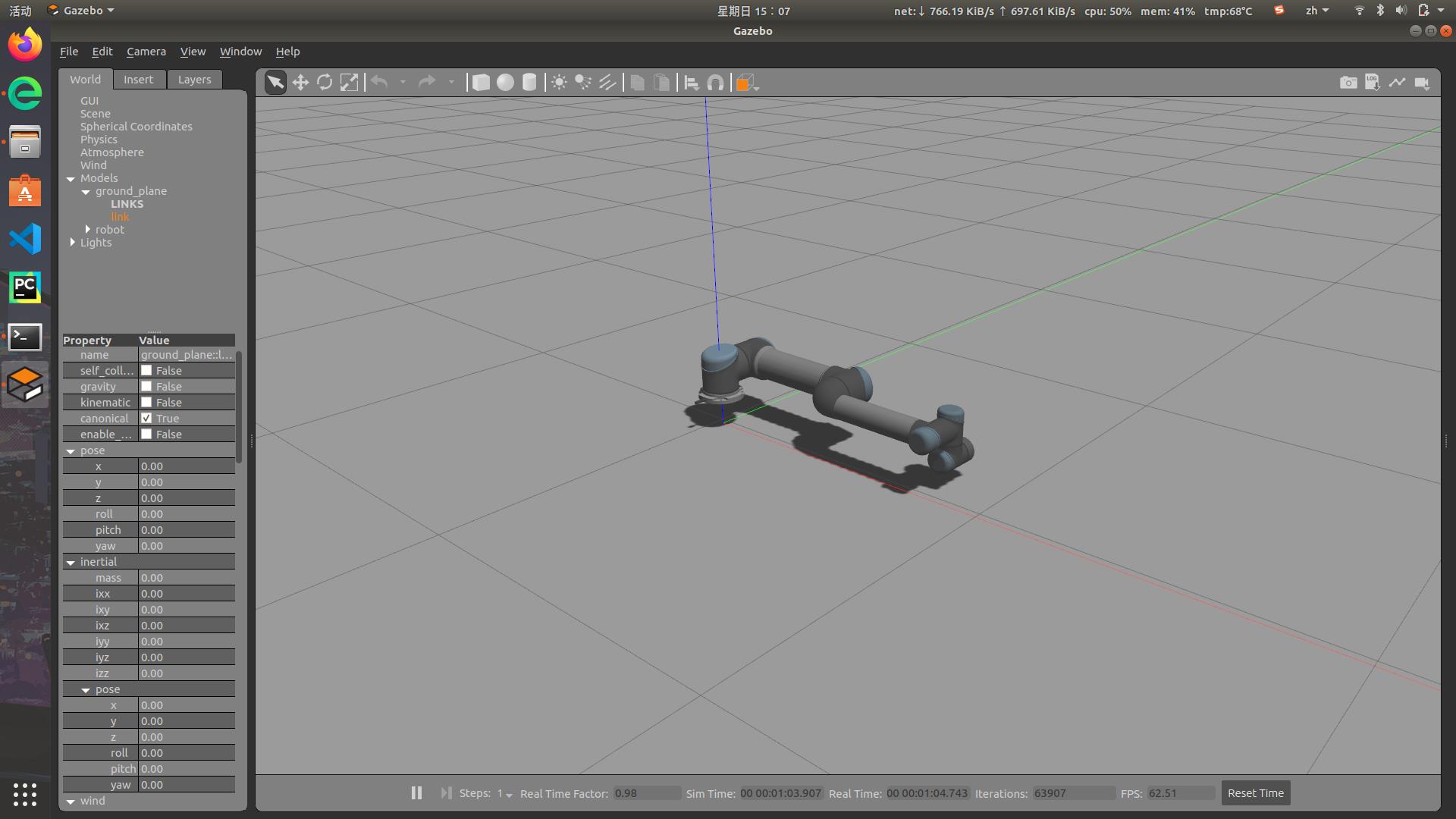
启动Gazebo和rviz
$ roslaunch ur_gazebo ur5_bringup.launch
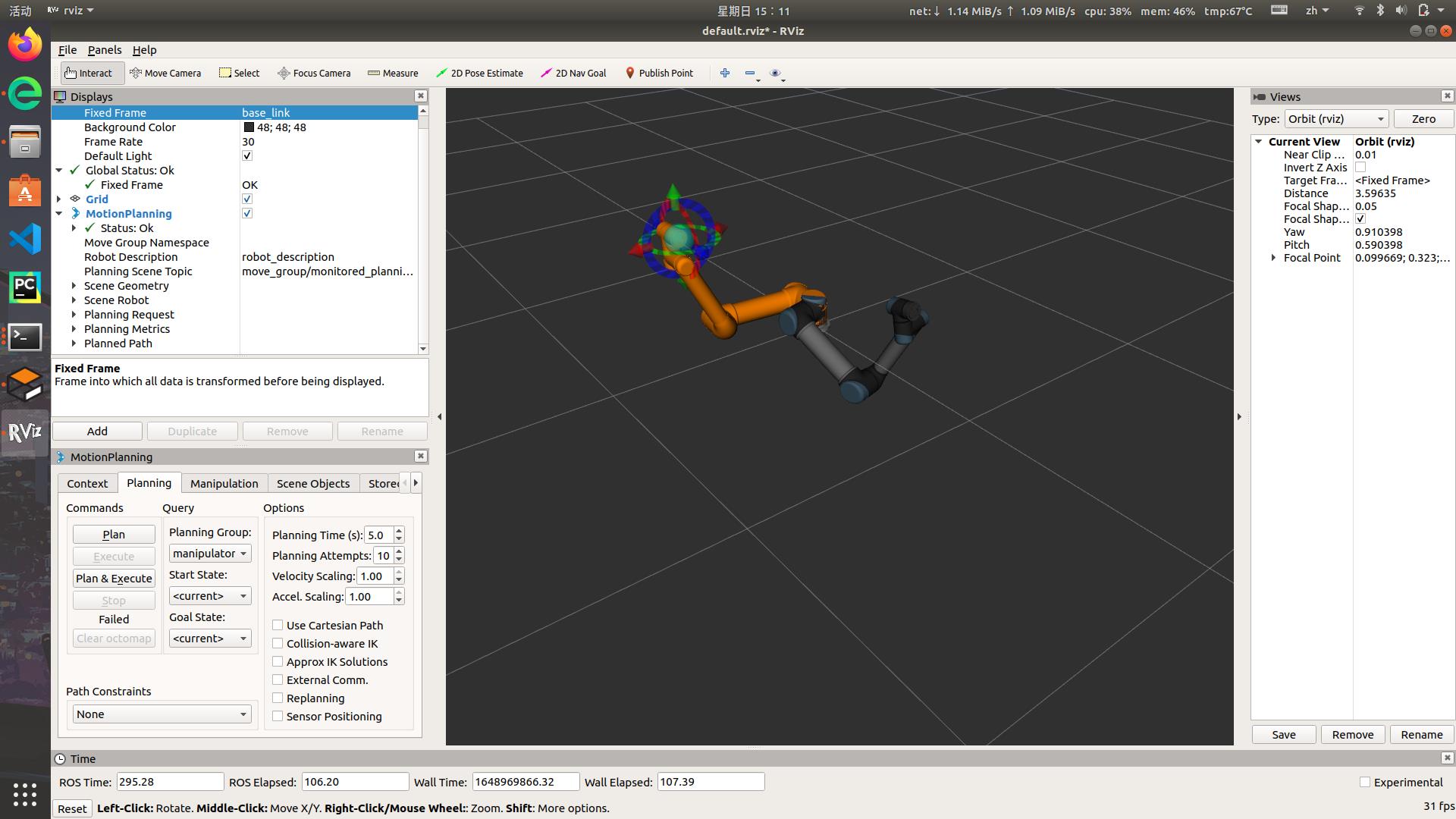
启动rviz仿真,完成轨迹规划和运动
$ roslaunch ur5_moveit_config ur5_moveit_planning_execution.launch sim:=true
$ roslaunch ur5_moveit_config moveit_rviz.launch config:=true
参考博客
Ubuntu18.04 ROS+Gazebo的UR5虚拟仿真
[gazebo仿真]添加RealSense双目相机传感器
ur5+realsensei435实现机械臂移动到检测物体位置
优遨机器人UR5与RealSense深度摄像头D435的手眼标定
以上是关于UR5仿真学习笔记的主要内容,如果未能解决你的问题,请参考以下文章