[ROS] Chinese MOOC || Chapter-8.1 tf介绍:tf tree 8.2 tf消息 8.3 tf in c++ 8.4 tf in python
Posted ecoflex
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了[ROS] Chinese MOOC || Chapter-8.1 tf介绍:tf tree 8.2 tf消息 8.3 tf in c++ 8.4 tf in python相关的知识,希望对你有一定的参考价值。
tf:coordinate transform
urdf:ros 机器人属性描述的规范

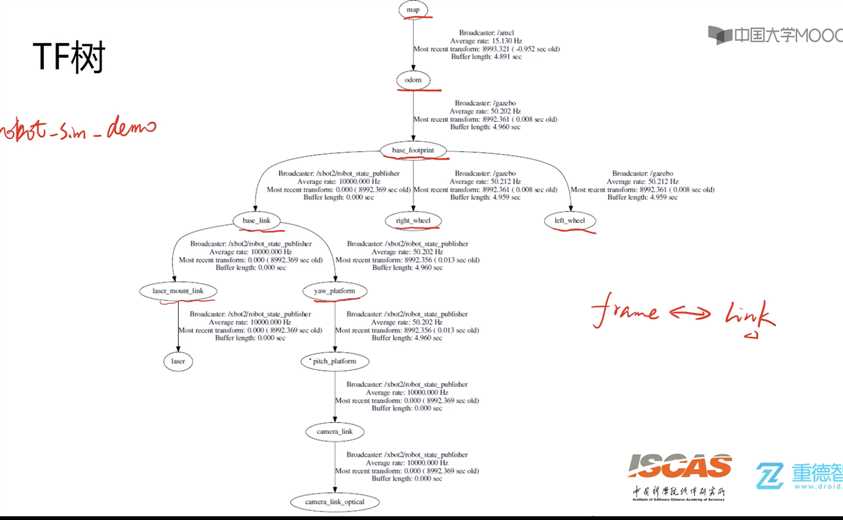
tf树必须是连通的
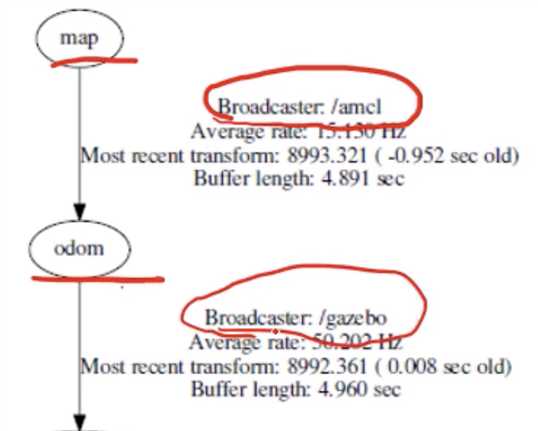
如果没有人来维护两个frame之间的联系(一个发送消息的node,or called broadcaster),就会断掉
broadcaster就一个是publisher
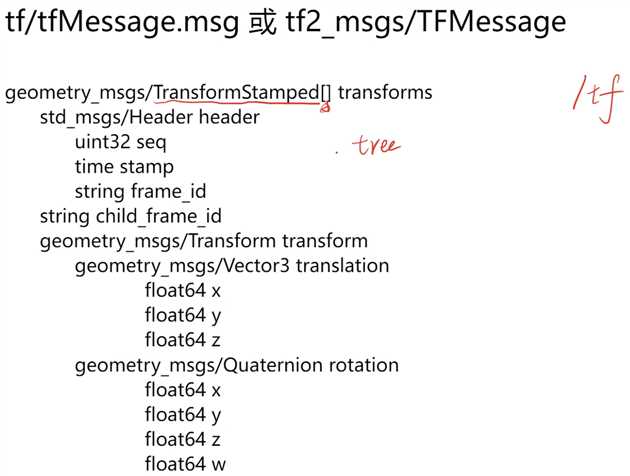
tf树是整个消息的反映
tf树就是把tf这个topic截取了一段信息来恢复出来的tree
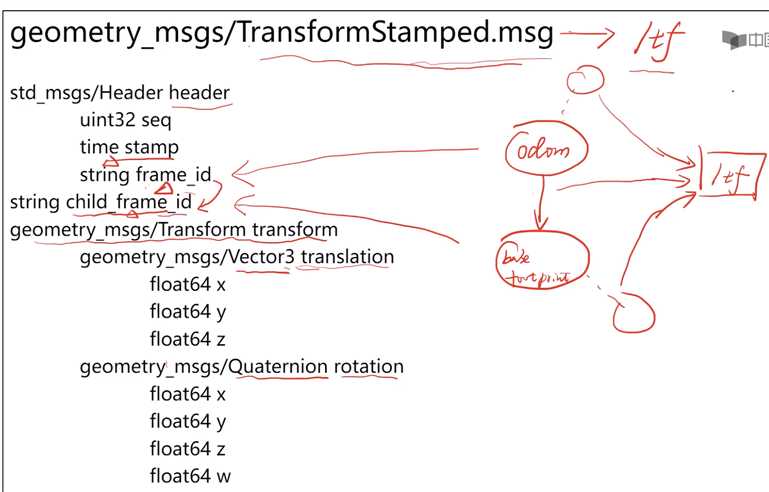
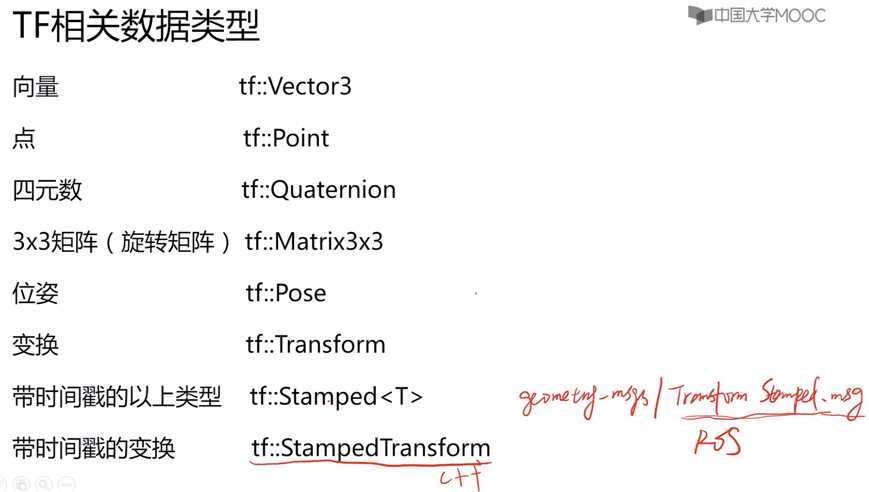
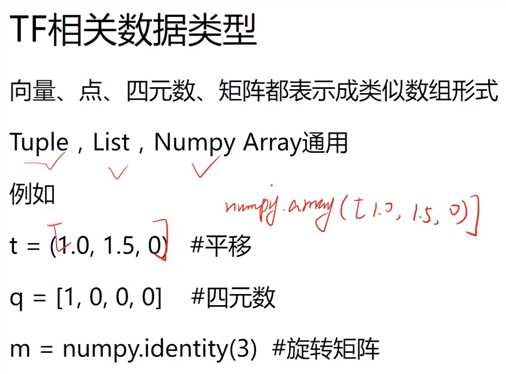
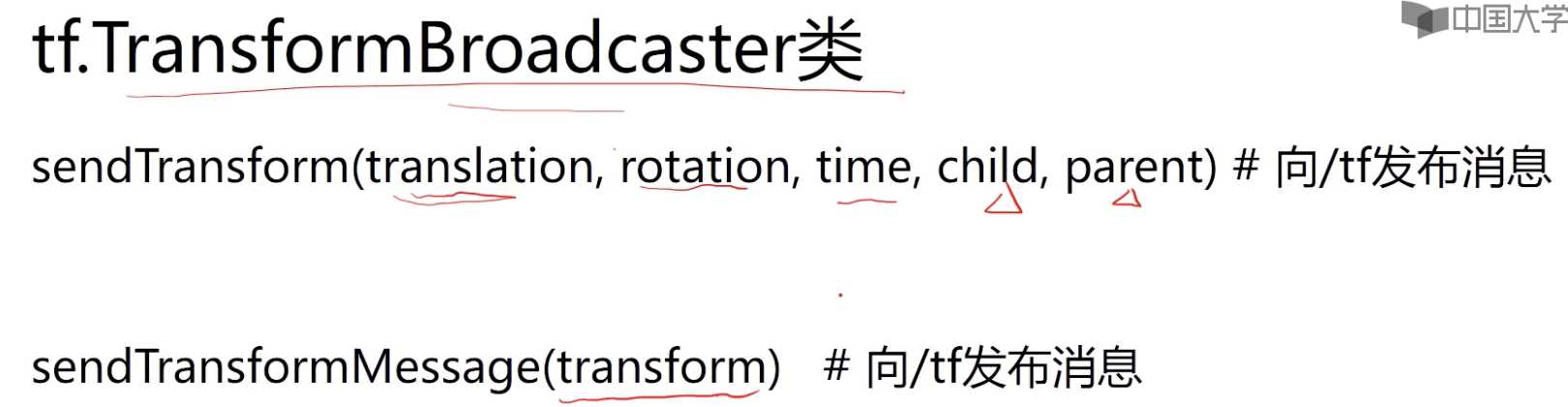
下面来看tf消息是什么,以及怎么发布。
![]()
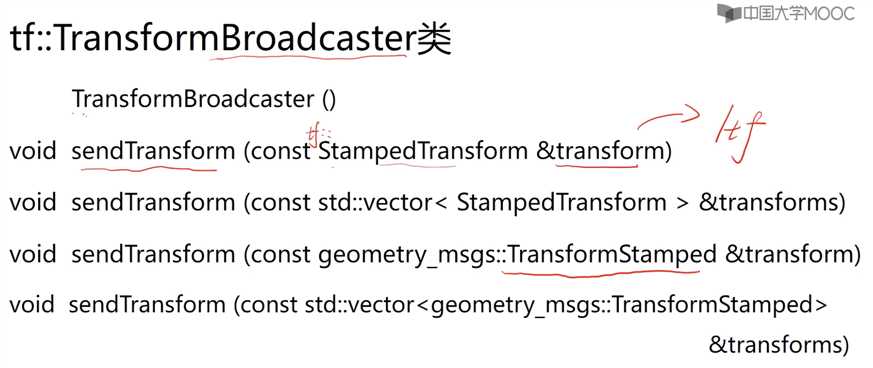
sendtransform 是把publisher封装了
![]()
以上是关于[ROS] Chinese MOOC || Chapter-8.1 tf介绍:tf tree 8.2 tf消息 8.3 tf in c++ 8.4 tf in python的主要内容,如果未能解决你的问题,请参考以下文章
[ROS] Chinese MOOC || Chapter-9.4 SLAM操作演示
[ROS] Chinese MOOC || Chapter-6.5 param_demo 参数服务器
[ROS] Chinese MOOC || Chapter-2.3 操作演示:Catkin工作空间探索
[ROS] Chinese MOOC || Chapter-2.1 Catkin工作空间与编译系统