[ROS] Chinese MOOC || Chapter-2.3 操作演示:Catkin工作空间探索
Posted ecoflex
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了[ROS] Chinese MOOC || Chapter-2.3 操作演示:Catkin工作空间探索相关的知识,希望对你有一定的参考价值。
slides:
https://www.gitbook.com/book/sychaichangkun/ros-tutorial-icourse163/details
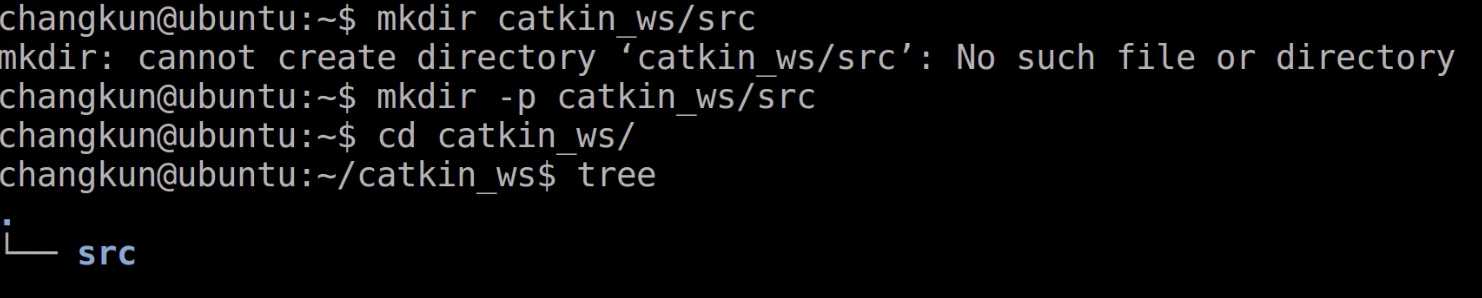
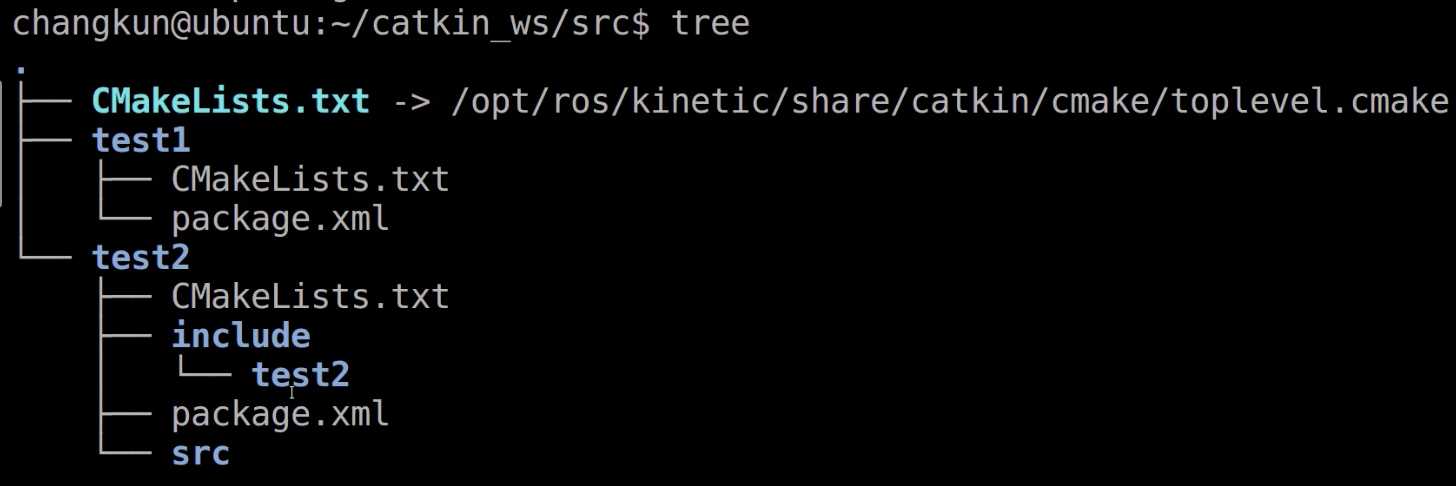
only on folder
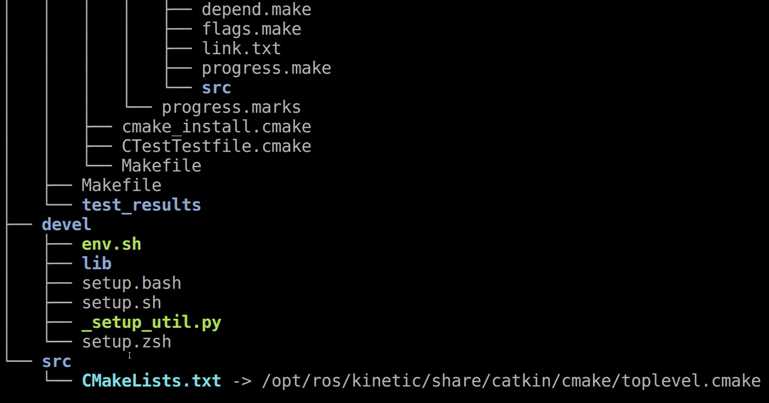
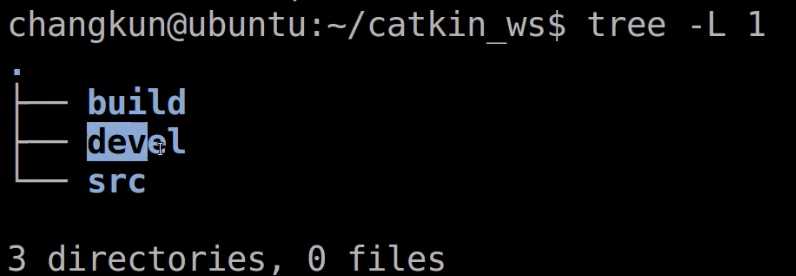
then apply catkin_make

and we have much more files

try to create a package: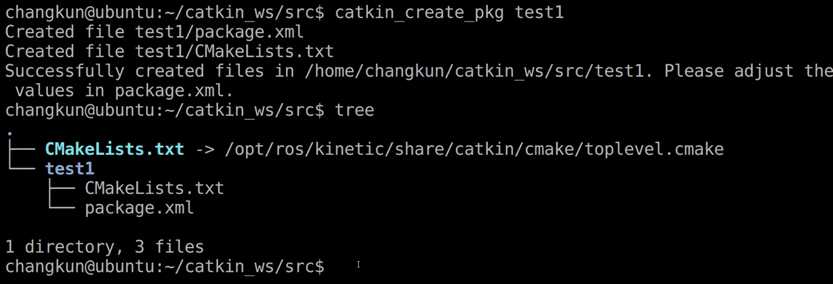
add dependency: roscpp rospy std_msgs(standard messages) and nav_msgs(navigation message)

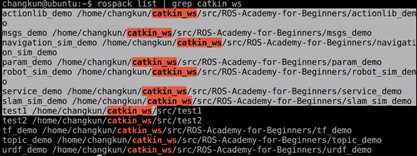
https://github.com/sychaichangkun/ROS-Academy-for-Beginners
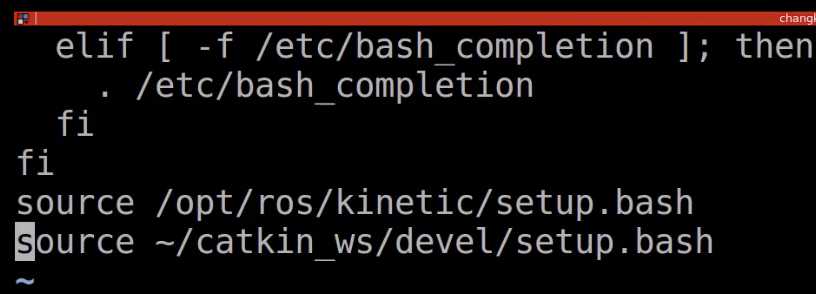
source之后在不同终端里还得重新source一遍。


/.bashrc文件最下面的内容
以上是关于[ROS] Chinese MOOC || Chapter-2.3 操作演示:Catkin工作空间探索的主要内容,如果未能解决你的问题,请参考以下文章
[ROS] Chinese MOOC || Chapter-9.4 SLAM操作演示
[ROS] Chinese MOOC || Chapter-6.5 param_demo 参数服务器
[ROS] Chinese MOOC || Chapter-2.3 操作演示:Catkin工作空间探索
[ROS] Chinese MOOC || Chapter-2.1 Catkin工作空间与编译系统