[ROS] Chinese MOOC || Chapter-2.1 Catkin工作空间与编译系统
Posted ecoflex
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了[ROS] Chinese MOOC || Chapter-2.1 Catkin工作空间与编译系统相关的知识,希望对你有一定的参考价值。
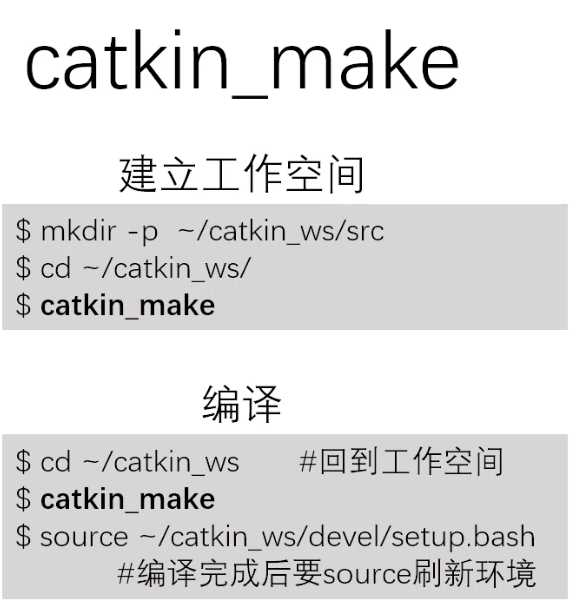
建立工作空间:名字可以任意取,但里面必须有src文件夹
编译:用source把编译完的workspace刷新到环境变量里,这样系统才知道ros可执行文件在哪,才能运行。否则roslaunch找不到工作空间。
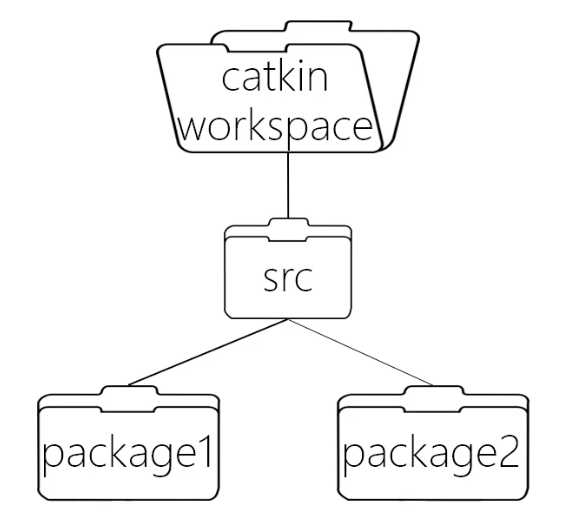
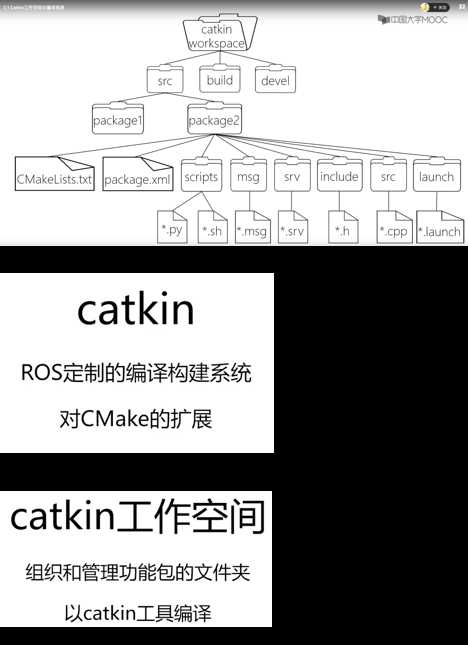
package is the most basic element for catkin make.
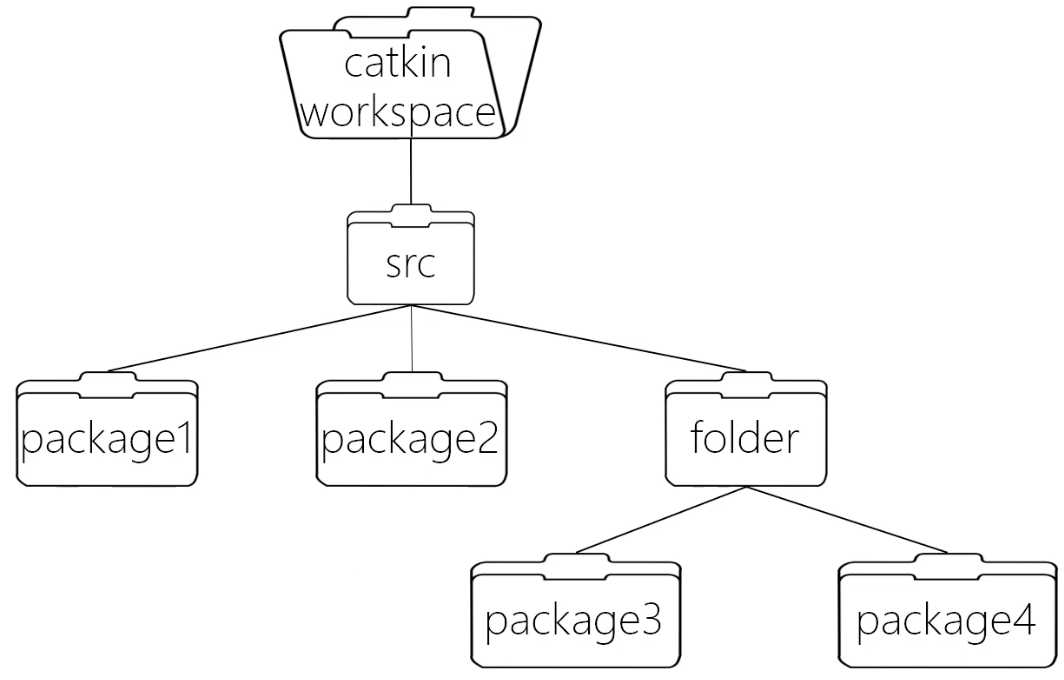
catkin make will recursively search packages in src folder, so the following organization is also allowed:
以上是关于[ROS] Chinese MOOC || Chapter-2.1 Catkin工作空间与编译系统的主要内容,如果未能解决你的问题,请参考以下文章
[ROS] Chinese MOOC || Chapter-9.4 SLAM操作演示
[ROS] Chinese MOOC || Chapter-6.5 param_demo 参数服务器
[ROS] Chinese MOOC || Chapter-2.3 操作演示:Catkin工作空间探索
[ROS] Chinese MOOC || Chapter-2.1 Catkin工作空间与编译系统