[ROS] Chinese MOOC || Chapter-4.1 通信架构 - Service和srv
Posted ecoflex
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了[ROS] Chinese MOOC || Chapter-4.1 通信架构 - Service和srv相关的知识,希望对你有一定的参考价值。
topic是一种信息传递模式,这里先看下service
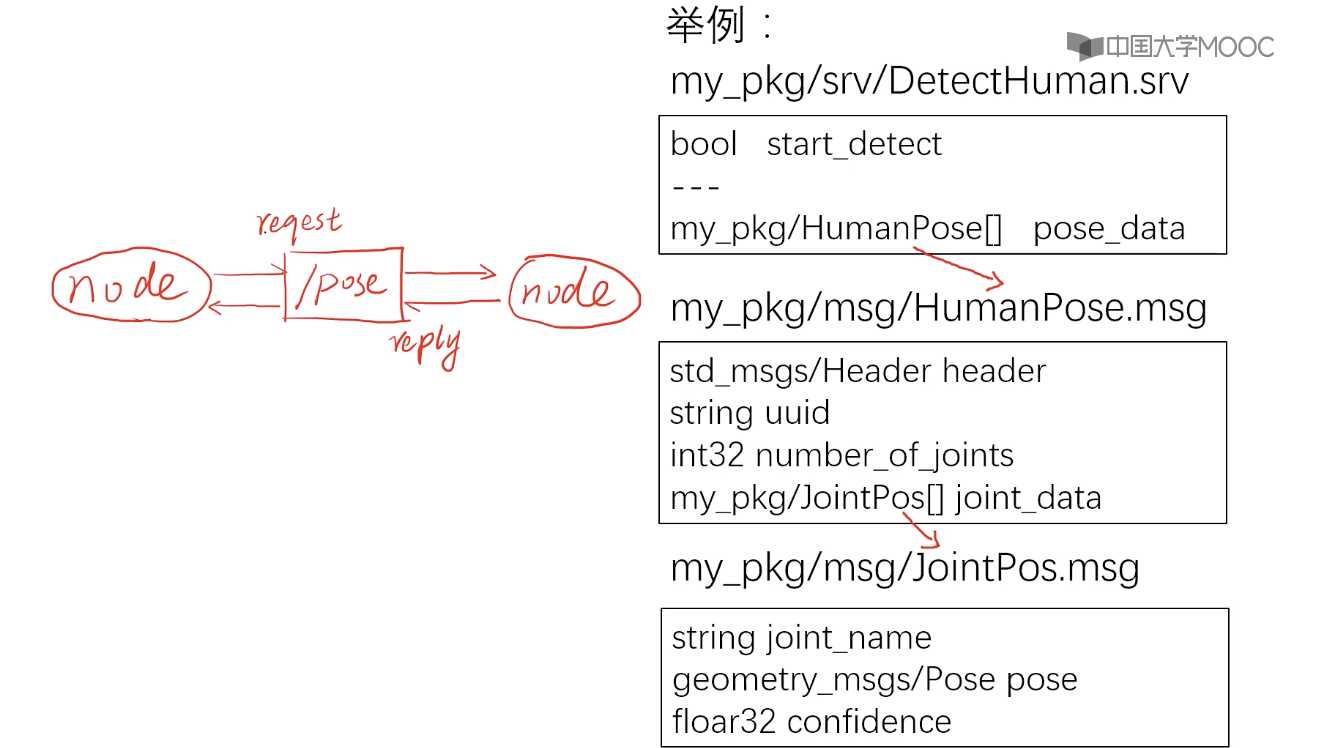
topic是一种单项传输信息的模式,在下面的场景:右node会连续不断发送数据给左node
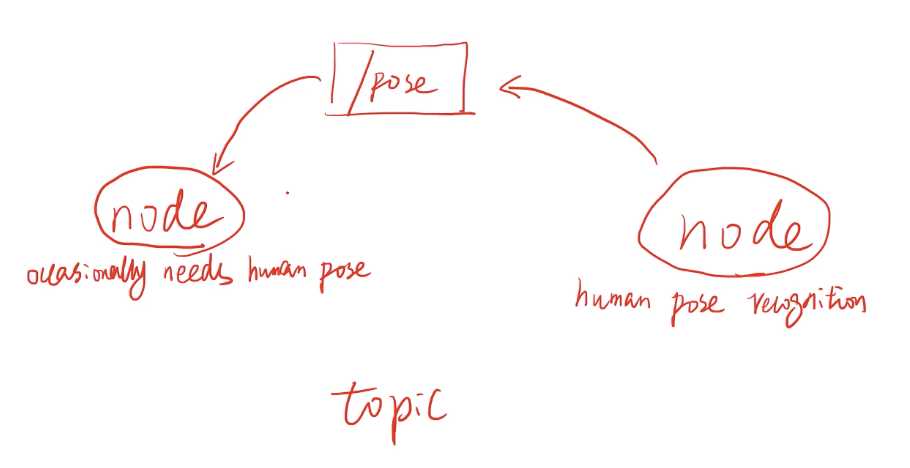
也可以写一个服务,让右边node接收到信息才开始发送,但是这样写起来很麻烦
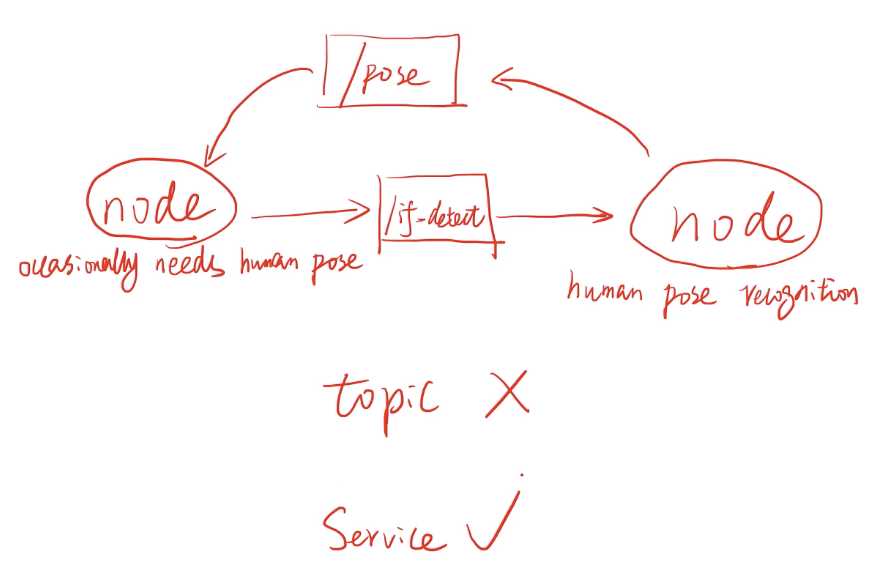
此时应该用service
node a发送请求,node b才会发送信息回来
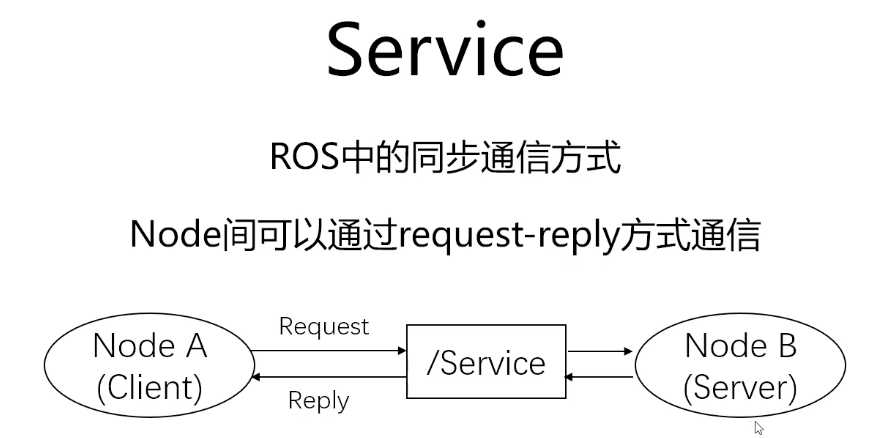
callback - RPC
以上是关于[ROS] Chinese MOOC || Chapter-4.1 通信架构 - Service和srv的主要内容,如果未能解决你的问题,请参考以下文章
[ROS] Chinese MOOC || Chapter-9.4 SLAM操作演示
[ROS] Chinese MOOC || Chapter-6.5 param_demo 参数服务器
[ROS] Chinese MOOC || Chapter-2.3 操作演示:Catkin工作空间探索
[ROS] Chinese MOOC || Chapter-2.1 Catkin工作空间与编译系统