Offloading Monocular Visual Odometry with Edge Computing: Optimizing Image Quality in Multi-Robot Sy
Posted zherlock
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了Offloading Monocular Visual Odometry with Edge Computing: Optimizing Image Quality in Multi-Robot Sy相关的知识,希望对你有一定的参考价值。
写得很简短,没看到结论
用的VINS-MONO
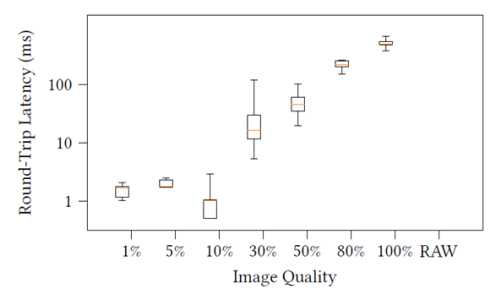
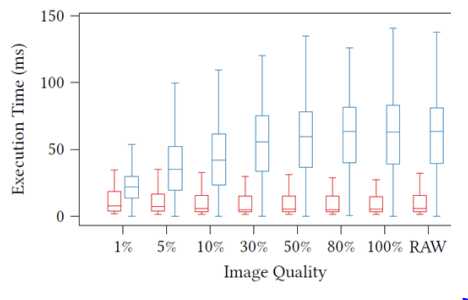
测试在已有数据集上,实验的变量是,不同的图像质量
图像质量和传输时间,处理时间,和SLAM误差的关系。
就是说,图像压缩是可以放进来考虑的一件事情
以上是关于Offloading Monocular Visual Odometry with Edge Computing: Optimizing Image Quality in Multi-Robot Sy的主要内容,如果未能解决你的问题,请参考以下文章
Zephyr网络传输Offloading--offload socket
《Unsupervised Monocular Depth Learning in Dynamic Scenes》论文笔记
《Boosting Monocular Depth Estimation Models to High-Resolution ...》论文笔记
泡泡一分钟:GEN-SLAM - Generative Modeling for Monocular Simultaneous Localization and Mapping