《Unsupervised Monocular Depth Learning in Dynamic Scenes》论文笔记
Posted m_buddy
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了《Unsupervised Monocular Depth Learning in Dynamic Scenes》论文笔记相关的知识,希望对你有一定的参考价值。
参考代码:depth_and_motion_learning
1. 概述
导读:这篇文章是在(Depth from Videos in the Wild)的基础上进行改进得到的,在之前的文章中运动区域/物体通过mask标注或是bounding box标注的形式确定,但是这样或多或少会存在对外依赖的问题。对此,文章从 刚性物体运动 在相机前运动的特性进行分析得出如下两个特性:
1)其在整幅图像中的占比是较少的,毕竟一般情况下不会运动的背景占据了较大的比例;
2)刚性运动的物体其内部运动特性是分段的常量值,也就是对应的梯度变化很小;
正是基于上述两点观察,文章在之前文章的基础上对运动物体区域构建了一个约束,从而减少了运动物体会深度估计带来的影响。
文章的方式是通过隐式约束的形式对刚性物体运动区域进行约束,从而避免了显示地对运动区域标注,因而文章的方法可以在输入2帧图像的情况下实现深度预测和物体运动感知,如下图所示:

2. 方法设计
2.1 网络结构
文章的网络结构如下图所示:
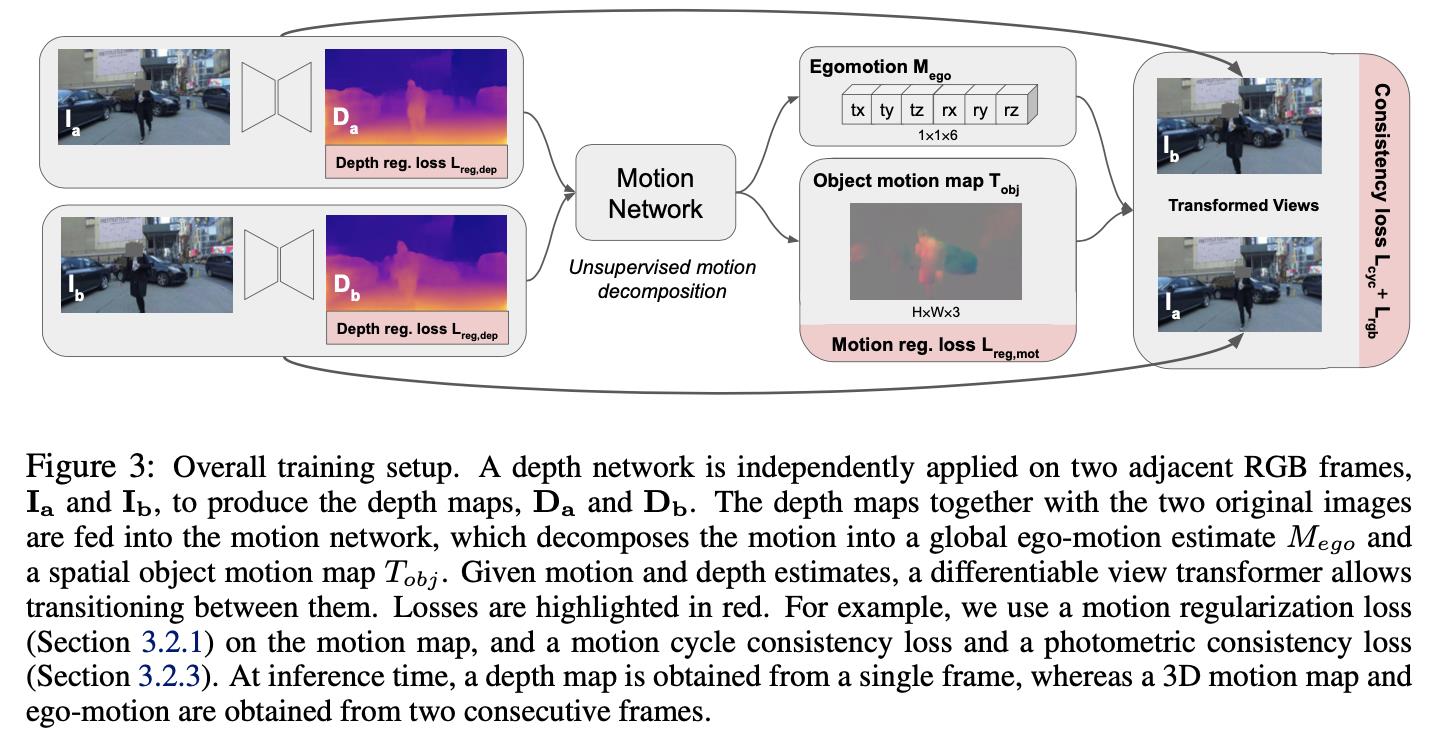
整体上这里网络结构与之前文章(Depth from Videos in the Wild)的网络结构类似,只是在一些细节上有所区别。这里深度估计网络的编解码结构是一致的,主要的不同点在相机位姿和内参估计网络上,在原本两帧图像输入基础上添加了深度估计结果作为输入。
2.2 损失函数
深度图平滑损失:
这部分损失是为了给深度估计结果带来平滑作用,减少噪声的产生,其损失函数描述为:
L
r
e
g
,
d
e
p
=
α
d
e
p
∬
(
∣
∂
u
d
(
u
,
v
)
e
−
∂
u
I
(
u
,
v
)
+
∂
v
d
(
u
,
v
)
e
−
∂
v
I
(
u
,
v
)
∣
d
u
d
v
L_{reg,dep}=\\alpha_{dep}\\iint(|\\partial_ud(u,v)e^{-\\partial_uI(u,v)}+\\partial_vd(u,v)e^{-\\partial_vI(u,v)}|d_ud_v
Lreg,dep=αdep∬(∣∂ud(u,v)e−∂uI(u,v)+∂vd(u,v)e−∂vI(u,v)∣dudv
循环一致性损失:
首先是变换矩阵的循环一致性约束,其描述为:
L
c
y
c
=
α
c
y
c
∣
∣
R
R
i
n
v
−
1
∣
∣
2
∣
∣
R
−
1
∣
∣
2
+
∣
∣
R
i
n
v
−
1
∣
∣
2
+
β
c
y
c
∬
∣
∣
R
i
n
v
T
(
u
,
v
)
+
T
i
n
v
(
u
w
a
r
p
,
v
w
a
r
p
)
∣
∣
2
∣
∣
T
(
u
,
v
)
∣
∣
2
+
∣
∣
T
i
n
v
(
u
w
a
r
p
,
v
w
a
r
p
)
∣
∣
2
d
u
d
v
L_{cyc}=\\alpha_{cyc}\\frac{||RR_{inv}-\\mathbf{1}||^2}{||R-\\mathbf{1}||^2+||R_{inv}-\\mathbf{1}||^2}+\\beta_{cyc}\\iint\\frac{||R_{inv}T(u,v)+T_{inv}(u_{warp},v_{warp})||^2}{||T(u,v)||^2+||T_{inv}(u_{warp},v_{warp})||^2}d_ud_v
Lcyc=αcyc∣∣R−1∣∣2+∣∣Rinv−1∣∣2∣∣RRinv−1∣∣2+βcyc∬∣∣T(u,v)∣∣2+∣∣Tinv(uwarp,vwarp)∣∣2∣∣RinvT(u,v)+Tinv(uwarp,vwarp)∣∣2dudv
图像域的循环一致性约束,描述为:
L
r
g
b
=
α
r
g
b
∬
∣
I
(
u
,
v
)
−
I
w
a
r
p
(
u
,
v
)
∣
1
D
u
,
v
>
D
w
a
r
p
(
u
,
v
)
d
u
d
v
+
β
r
g
b
1
−
S
S
I
M
(
I
,
I
w
a
r
p
)
2
L_{rgb}=\\alpha_{rgb}\\iint|I(u,v)-I_{warp}(u,v)|\\mathbf{1}_{D_{u,v}\\gt D_{warp}(u,v)}d_ud_v+\\beta_{rgb}\\frac{1-\\mathcal{SSIM(I,I_{warp})}}{2}
Lrgb=αrgb∬∣I(u,v)−Iwarp(u,v)∣1Du,v>Dwarp(u,v)dudv+βrgb21−SSIM(I,Iwarp)
物体移动约束损失:
这部分损失主要是完成下面的两个作用:
- 1)根据上文提到的稀疏特性,对运动场做稀疏化约束,这里使用的 L 1 2 L{\\frac{1}{2}} L21,文章指出该函数具有更好的稀疏特性;
- 2)基于刚性物体运动的分析,对刚性物体运动场施加梯度损失,使其在分布呈现分段的常量值特性;
首先对于常量值特性,添加梯度约束:
L
g
1
[
T
(
u
,
v
)
]
=
∑
i
∈
{
x
,
y
,
z
}
∬
(
∂
u
T
i
(
u
,
v
)
)
2
+
(
∂
v
T
i
(
u
,
v
)
)
2
d
u
d
v
L_{g1}[T(u,v)]=\\sum_{i\\in \\{x,y,z\\}}\\iint \\sqrt{(\\partial_uT_i(u,v))^2+(\\partial_vT_i(u,v))^2}d_ud_v
Lg1[T(u,v)]=i∈{x,y,z}∑∬(∂uTi(u,v))2+(∂vTi(u,v))2d以上是关于《Unsupervised Monocular Depth Learning in Dynamic Scenes》论文笔记的主要内容,如果未能解决你的问题,请参考以下文章