隐马尔可夫模型(HMM)总结
Posted
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了隐马尔可夫模型(HMM)总结相关的知识,希望对你有一定的参考价值。
摘要:
1.算法概述
2.算法推导
3.算法特性及优缺点
4.注意事项(算法过程,调参等注意事项)
5.实现和具体例子
6.适用场合
内容:
1.算法概述
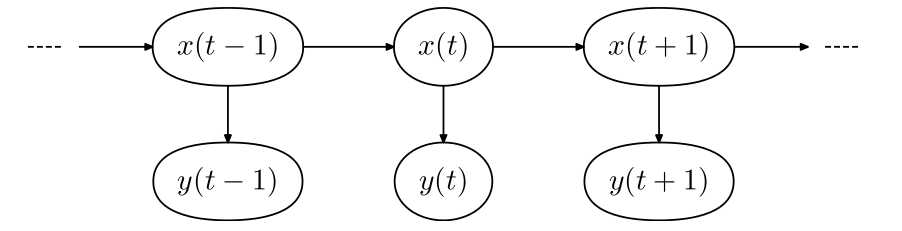
隐马尔科夫模型(Hidden Markov Model)是关于时序的概率模型,描述由一个隐含的马尔科夫链生成不可观测的状态序列,再由状态序列生成观测序列的过程。这种通过观测序列预测隐含的标记序列的问题叫做标注。
下图来自维基百科:
并且本文有如下符号表示:
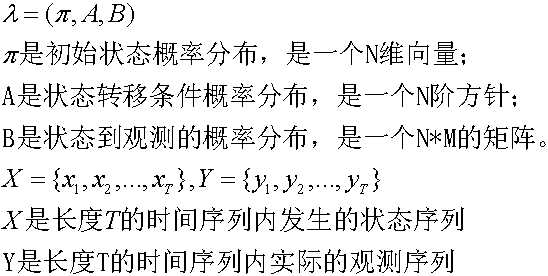
其中 就是我们需要求得的一个三元组;拿中文分词的例子来说,分词中的状态序列是{ Begin,Middle,End,Single },对应单个字成词的就是Single,双连词就是{Begin,End},三联词就是{Begin,Middle,End}。而我们观测到的就是一个句子;通过HMM实现的分词算法可以通过
就是我们需要求得的一个三元组;拿中文分词的例子来说,分词中的状态序列是{ Begin,Middle,End,Single },对应单个字成词的就是Single,双连词就是{Begin,End},三联词就是{Begin,Middle,End}。而我们观测到的就是一个句子;通过HMM实现的分词算法可以通过
求得初始{ Begin,Middle,End,Single }这四个状态的分布,以及各个状态间相互转移的条件概率矩阵,当前状态对应一个中文词(Unicode编码)的条件概率矩阵。另一个直观的例子来自《统计学习方法》,是给定4个盒子(4个状态),每个盒子有若干红,白小球,给定一个观测序列,求对应盒子的序列。
最后马尔科夫模型的两个基本假设:
1.齐次马尔科夫假设:马尔科夫链的当前状态之和其前一刻的状态有关,与其它状态无关;对应的概率语言是:
2.观测独立性假设:当前的观测只与该时刻的马尔科夫链相关,与其它观测及状态无关;对应的概率语言是:
2.算法推导
以下可以看作是HMM算法的一步步拆分,并且依次加深理解:
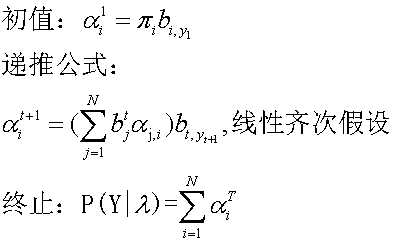
1.在模型给定下求观测序列的概率,即
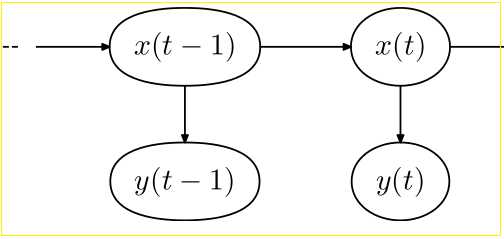
前向算法(动态规划算法):求观测序列为y1,y2,...,yt,并且t时间点对应状态 的概率
的概率
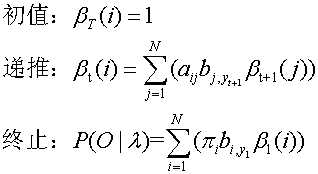
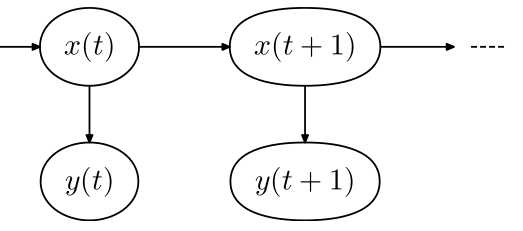
后向算法(动态规划算法):已知t时间点对应状态,求观测序列y(t+1),y(t+2),...,y(T)的概率
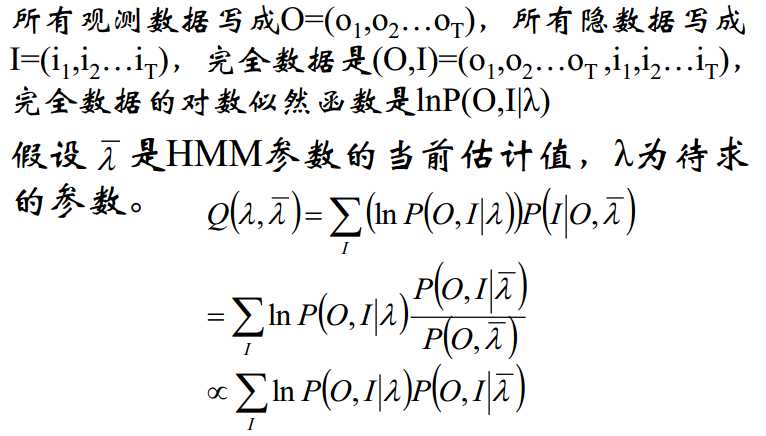
2.求解模型参数,使用对数极大似然估计, ,得到三元组
,得到三元组
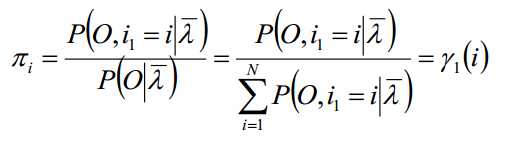
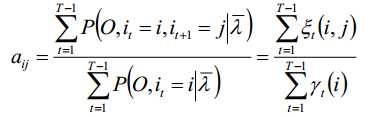
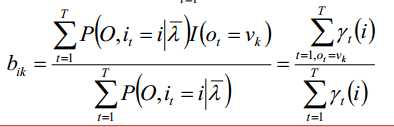
1)建立目标函数: 2)拆分三项:
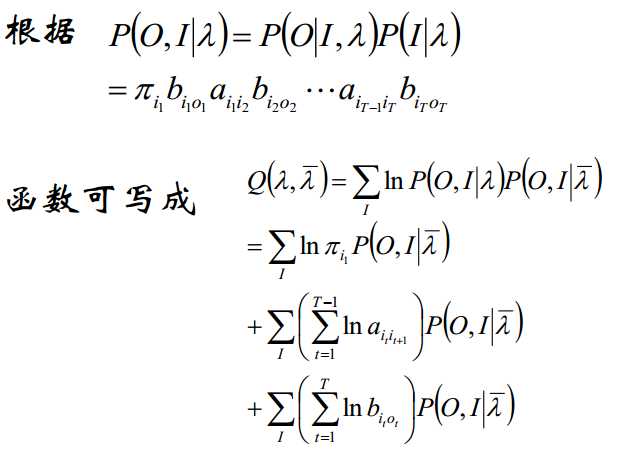
由概率加和为1,建立拉格朗日函数,求得三个最大化的
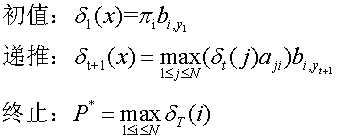
3.求最可能的状态序列,即 :维特比算法
:维特比算法
3.算法特性及优缺点 待续~~~
4.注意事项(算法过程,调参等注意事项)
5.实现和具体例子
6.适用场合
以上是关于隐马尔可夫模型(HMM)总结的主要内容,如果未能解决你的问题,请参考以下文章