ros自定义消息
Posted fuhang
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了ros自定义消息相关的知识,希望对你有一定的参考价值。
ros自定义消息可以根据自身项目需求定义和封装想要的数据类型和数据结构。具体可以参考维基百科关于ros自定义消息部分
这里我只是记录自定义消息的要点部分:
1.首先要在工作空间下功能包中创建一个msg的文件夹用于存放消息文件。创建过程可以通过手动创建,也可以通过以下命令创建
mkdir msg
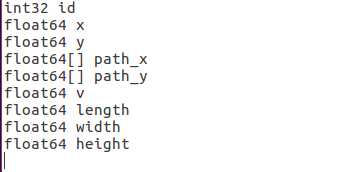
2.在msg文件中添加消息文件,并在其中添加自定义消息类型。这里给出样例:

object.msg
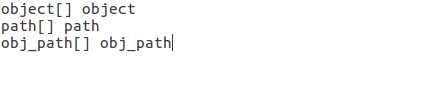
package.msg package.msg主要是对其他的消息进行了整合,在代码中更好的实现封装。
3.接下来修改包的package.xml文件,在下图所示位置添加"message_generation","message_runtime"对msg的转为C++代码。
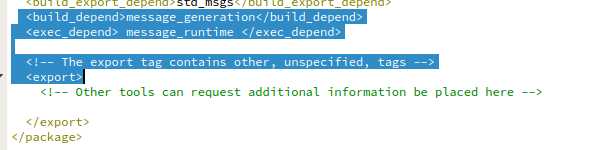
这里需要注意的是按照维基百科中添加:
<build_depend>message_generation</build_depend> <run_depend>message_runtime</run_depend>
的时候会报错,后来改为:
<build_depend>message_generation</build_depend> <exec_depend> message_runtime </exec_depend>
就可以了。
4.修改Cmakelists.txt文件
(1)修改find_packag.
添加对message_generation的依赖,这样就可以生成消息了。 你可以直接在COMPONENTS的列表里增加message_generation。
find_package(catkin REQUIRED COMPONENTS
roscpp
rospy
std_msgs
message_generation
)
(2)修改 add_message_files
添加你在msg文件夹中定义的所有的msg文件。
add_message_files(
FILES
Locate.msg
Object.msg
Package.msg
Path.msg
)
(3)在 add_message_files后面添加generate_messages()
add_message_files(
FILES
Locate.msg
Object.msg
Package.msg
Path.msg
)
generate_messages()
以上部分已经完成了对ROS自定义消息。
4.测试
通过一下命令可以测试自定义消息是否成功
rosmsg show predict/Object
其中predict是包名,Object是消息文件名称。结果:
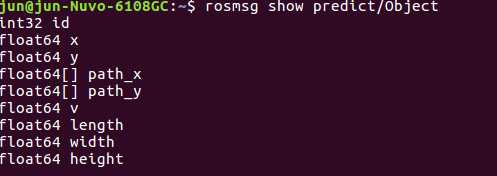
如果能出现以上结果,表示自定义消息成功了。
5.出错原因
(1)只要按照上面的配置方法自定义消息应该是没有问题了,要注意的是一定要对package.xml,Cmakeliststxt进行正确修改。
(2)还要注意一定要写对包名和消息文件名称,不然就会出现如下错误。
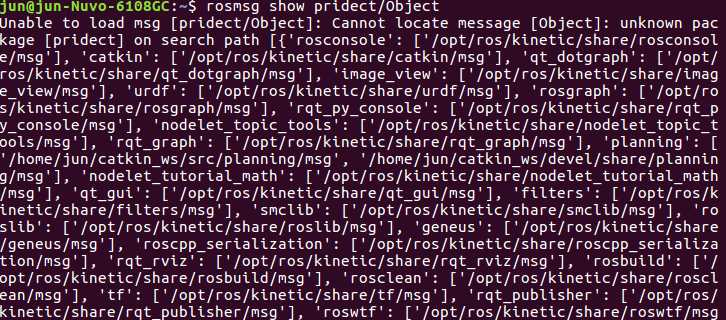
(3)还有一种可能会出现如上错误,就是工作空间路径没有配置正确。只要重新导入ros路径到.bashrc 文件中就可以了
以上是关于ros自定义消息的主要内容,如果未能解决你的问题,请参考以下文章
ros2 pub/sub 自定义消息通过 ros2-web-bridge 到客户端应用程序
SpringCloud系列十一:SpringCloudStream(SpringCloudStream 简介创建消息生产者创建消息消费者自定义消息通道分组与持久化设置 RoutingKey)(代码片段