unity wheelCollider怎么设置才能实现漂移的效果
Posted
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了unity wheelCollider怎么设置才能实现漂移的效果相关的知识,希望对你有一定的参考价值。
参考技术A unity wheelCollider怎么设置才能实现漂移的效果那个在max中的文件明明是z轴向上,为什么设置y轴向上导出呢?max里没有说y轴就是向上的,那也许是教你人的习惯,并不是他说y轴向上就向上,你要看文件的轴向再考虑哪个轴向上然后导出
最后一个问题
这样导入unity中没问题那就是对的,说明这个方法也可以
有些问题不需要问,因为你没理解轴向,而是你把别人的习惯当成真理去对待
并且你先前导入的文件已经出问题了,你还坚持在错误的思路上问问题 参考技术B 漂移效果时你调试wheelCollider合理实现的 车子快速行驶突然往反方向转弯就能形成漂移 不过手感要你自己调 给你个 参数 车身 mass 为1000 四个轮子mass为 600 速度speed为2400 你去试试能不能漂移
详解Unity中的车轮碰撞器Wheel Collider
前言
碰撞体组件定义了物体的物理性状,Unity中有一系列基本碰撞体,我们可以使用它们组合成任意形状,但除了基本碰撞体之外,Untiy还提供了诸如车轮(Wheel)、网格(Mesh)、地形(Terrain)等碰撞器,就比如Wheel Collider,该碰撞器用以实现车辆模拟,它可以模型车辆的前进后退,刹车,转向,打滑等。今天就简要介绍一下该组件的使用。
目录
前排提醒:本文仅代表个人观点,以供交流学习,若有不同意见请评论留言,笔者一定好好学习,天天向上。
阅读此文章时,若有不理解的地方,推荐观看本文列出的参考资料来对照阅读。
阅读本篇前,请先了解“刚体和碰撞体”相关知识。
Unity版本[2019.4.10f1] 梦小天幼 & 禁止转载
视频讲解:
详解Unity的车轮碰撞器_BiLiBiLi
一、先做一辆小汽车
车轮碰撞器顾名思义,肯定是用于模拟车轮的,你可以用它来模拟自行车、三轮车、小汽车、大货车,统统都可以!该碰撞体内置了碰撞检测、车轮物理组件和基于打滑的轮胎摩擦模型。是专为车轮而生的碰撞器!
1.如何实现?实现效果展示
So,先从使用车轮碰撞器做一辆车车开始,首先想想若使用传统方法做汽车,车轮应当如何实现?
用transform位移,然后每秒转几圈、拐弯时车轮和车体整体都要偏移,很难做出车轮拐弯车体不动的效果,这时候使用刚体来驱动或许效果会好一点,但是它的模拟力不能确定,还有悬挂,刹车,打滑等又要如何实现?所以如果我们用自己的想法来实现一辆小汽车,可能困难重重,但!Unity为我们提供了车轮碰撞器!它可以解决上述所有问题!
老规矩,先看实现效果,再细说实现流程。
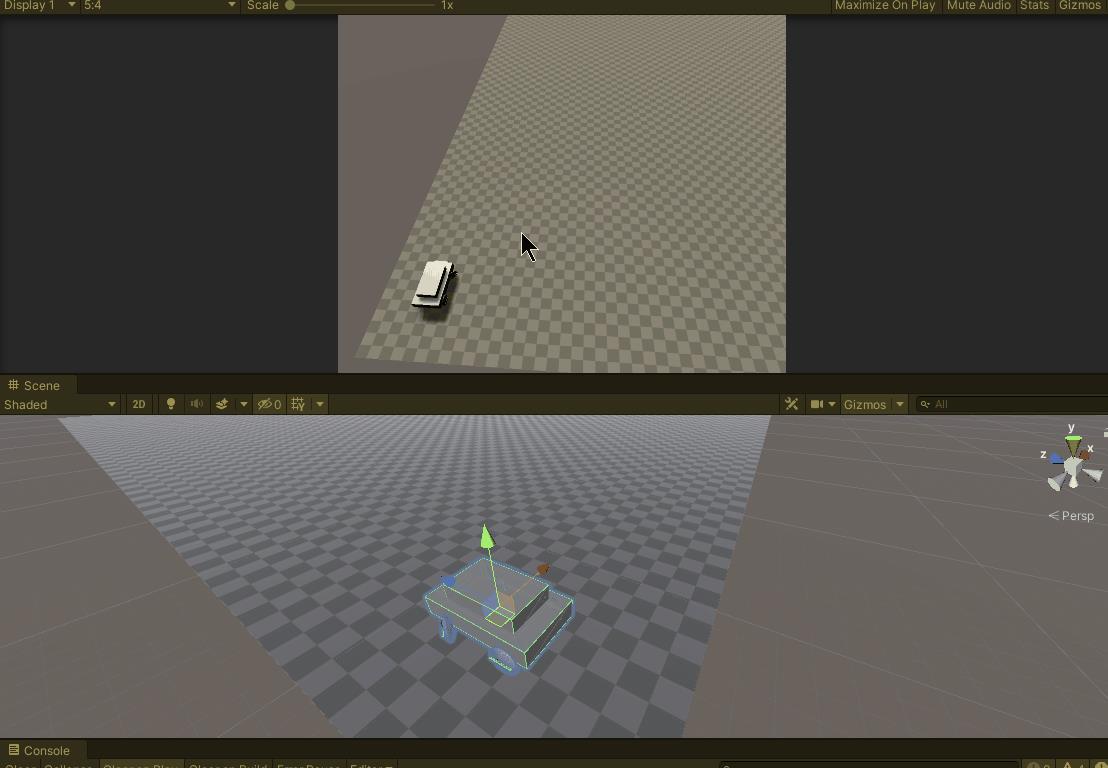
通过这个动图,我们可以清楚的看到,小汽车可以前进后退,转弯,打滑。下面来说说详细的实现步骤
2.实现步骤
首先我们要认识到空物体的重要性,举个例子,那就相当于电脑中的文件夹,它没有什么实际的功能,但是它可以帮我们将一大堆资源合理摆放,我们要做一辆汽车,为了便于脚本控制和方便我们管理,所以首先我们要建立一个汽车的空物体,这是一个"总文件夹",场景中和汽车相关的都放在这里。其次我们建立三个"子文件夹(三个空物体)",分别存放汽车主体模型,汽车轮胎,汽车轮胎的车轮碰撞体。
你可能会疑惑?什么汽车轮胎和汽车轮胎的WheelCollider要分类存放,碰撞体组件不是依附在汽车轮胎模型上的吗?答案如下:
不必通过转动或滚动 WheelCollider 对象来控制汽车;附加了 WheelCollider 的对象应始终相对于汽车本身固定。但是,可能会需要车轮会旋转移动之类的动画操作。最好的方法是为 WheelCollider(依附于空物体)和车轮模型设置单独的对象(引用自Unity官方文档,经过简要修改)
所以我们建立好三个空物体,存放汽车主体模型、车轮模型、碰撞体,车体模型用最基本的正方体堆一个就行,车轮模型使用圆球,压扁它当作车轮(为什么不用圆柱体,因为它的轴向不对,大家可以拿一个圆柱体试试看),碰撞体需要单独建四个空物体,然后为它们加上WheelCollider。So,结构图如下。

3.注意事项
写代码前,有几点需要注意的事项。(很重要!!!)
首先要在最上层的空物体上加上刚体组件,也就是"Car",更改质量参数Mass,大概1500(普通小汽车的重量),其他不用改。这样做的目的是给车加上重量,以及让车具有物理特性。且!如果不给WheelCollider的父级或父父级加上刚体组件的话,WheelCollider是不会显示在Scene窗口中的。
其次,删除汽车车轮模型上的自带的碰撞体,因为WheelCollider本身就具有碰撞,所以车轮模型的作用就只是动画而已,其物理特性,完全由WheelCollider控制的。
最后,WheelCollider的位置和车轮模型的位置要一样,大致一样就行。因为它们分开是为了方便控制,但本身它们就应该在同一个位置,一个负责外形,一个负责物理实现。
最后的最后,若WheelCollider的半径太小,调整其Radius参数即可
4.代码实现
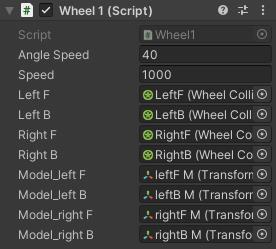
该脚本挂载到任何地方都行,建议挂载到Car总空物体上,截图和代码如下:
private float angle;
public float angleSpeed;
public float moveSpeed;
//注意这八个变量,四个是获取车轮碰撞器的,四个是获取车轮模型的
public WheelCollider leftF;
public WheelCollider leftB;
public WheelCollider rightF;
public WheelCollider rightB;
public Transform model_leftF;
public Transform model_leftB;
public Transform model_rightF;
public Transform model_rightB;
void Update()
WheelsControl_Update();
//控制移动 转向
void WheelsControl_Update()
//垂直轴和水平轴
float h = Input.GetAxisRaw("Horizontal");
float v = Input.GetAxisRaw("Vertical");
//前轮角度,后轮驱动
//steerAngle:转向角度,总是围绕自身Y轴,转向
//motorTorque:电机转矩,驱动车轮
angle = angleSpeed * h;
leftF.steerAngle = angle;
rightF.steerAngle = angle;
leftB.motorTorque = v * moveSpeed;
rightB.motorTorque = v * moveSpeed;
//当车轮碰撞器位置角度改变,随之也变更车轮模型的位置角度
WheelsModel_Update(model_leftF, leftF);
WheelsModel_Update(model_leftB, leftB);
WheelsModel_Update(model_rightF, rightF);
WheelsModel_Update(model_rightB, rightB);
//控制车轮模型移动 转向
void WheelsModel_Update(Transform t, WheelCollider wheel)
Vector3 pos = t.position;
Quaternion rot = t.rotation;
wheel.GetWorldPose(out pos, out rot);
t.position = pos;
t.rotation = rot;
二、Wheel Collider组件参数介绍
现在你已经完成了一辆小汽车了,是不是成就感满满,然后呢我们就来详细说说该组件都有什么参数,看起来一大堆很唬人是吧,咱就挑些重点的说说,其他的先不涉及。
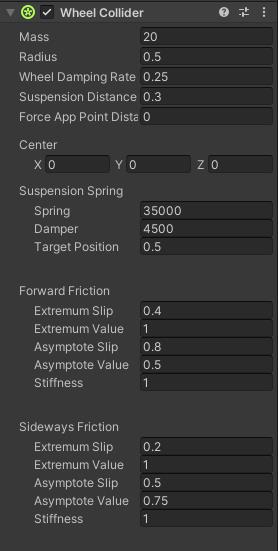
1.Mass质量 & Radius 半径
顾名思义,质量值一般就设置为单个轮胎重量就行,和现实世界不要差太多,半径就是半径,不多解释,自己调一调试一试。
2.Wheel Damping Rate
应用于车轮的阻尼值。阻尼是作用于运动物体的阻力,值越大,车越难打滑。
3.Suspension Distance
车轮悬挂的最大延伸距离,悬挂始终向下延伸穿过自身Y轴,就是悬挂高度,始终是垂直向下的。这个要看你做什么车,比如汽车,底盘低,默认值我觉得就OK,但是那种越野车就需要把该值改高一点了。设置为0,那么车本身的转向避震就会很生硬,像个方块一样。
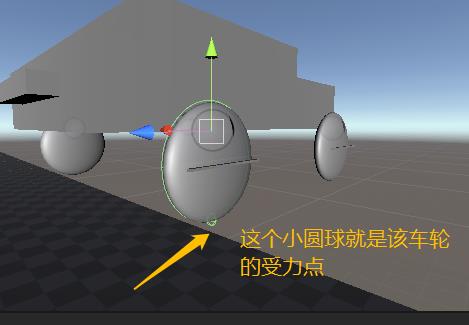
4.Force App Point Distance
车轮的受力点,默认位于静止车轮的底部(如下图),一般无需改动。
5.Suspension Spring
设置悬挂系统相关参数:
1.Spring :
值越大,悬架抵达目标位置就越快,就是悬架弹簧弹一个来回的时间的快慢
2.Damper :
抑制悬架速度,这个参数和上一个是相辅相成的(应该是相爱相杀),若想要到达自己需要的悬架数据,需不断调整。
3.Target Position :
这个值就是在静止状态下的悬架展开程度(根据悬架距离Supension Distance计算),也就是说悬架静止状态下的展开和压缩并不是有车体重量控制的,而是这个参数来控制的。默认0.5,符合正常的汽车悬架。值为1完全展开,为0完全压缩。
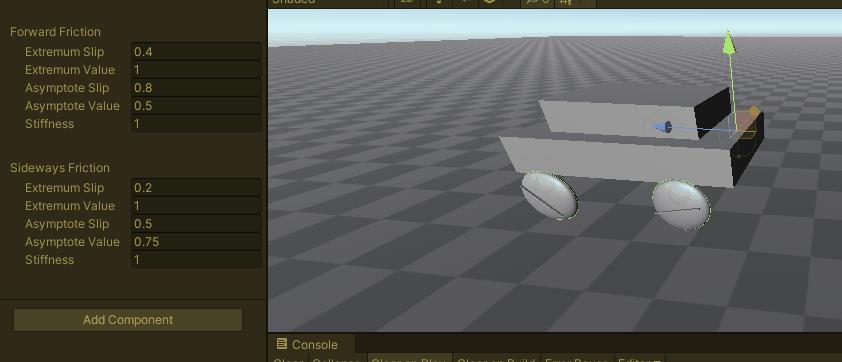
6.Forward Friction & Sideways Friction
根据名字应该就知道,这两组参数用于设置车轮的纵向(前进后退)和横向(转向)的摩擦特性。
该如何理解呢?
Extremum Slip ,Extremum Value
Asymptote Slip,Asymptote Value
上述四个值是坐标系的两个坐标,它们确定了一个滑动距离与摩擦力的关系曲线
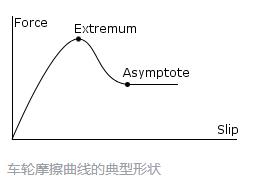
(该图截取自Unity官方文档)
Stiffnes :该值则整体调节摩擦曲线的倍数
若是上面不理解直接修改这个就可以,新手不建议动上面四个变量,因为在不懂的情况下修改会产生很奇怪的效果。
下图演示了仅修改车轮纵向的Stiffnes的值:
通过在运行时改变该值用以模拟各种地面材质(注意,物理材质在车轮碰撞器上是无效的,所以需要通过修改该值来模拟各种地面)
三、Wheel Collider API
学习WheelCollider的API可以让我们更好的对车轮进行控制,比如上面的做一个小汽车的案例,就使用了该碰撞器的两个变量,motorTorque和steerAngle。下面简要讲述一下这些API吧。
| 变量 | 描述 | 单位 | 备注 |
|---|---|---|---|
| motorTorque | 轮轴上的电机扭矩 | 牛米 | |
| steerAngle | 转向角度 | 度 | |
| breakTorque | 制动扭矩 | 牛米 | |
| rpm | 当前轮轴转速 | 每分钟/转 | 只读 |
| forwardFriction | 车轮前进方向上的摩擦 | ||
| sidewaysFriction | 车轮侧向上的摩擦 | ||
| wheelDampingRate | 车轮的阻尼率,必须大于零 | ||
| GetWorldPose(V3 pos, Quat quat) | 获取车轮世界空间姿态 | 获取WheelCollider参数同步到模型轮胎上,使其转动 | |
| 参考本篇1-4代码实现部分,第46行 |
挑几个重点说说:
1.motorTorque
此参数用于调整车轮的转动,也就是传说中的前进与后退。比如你想要做一辆后驱车,就只应该设置后两个车轮受控。单位是牛米(N.m),是力的单位和距离的单位的乘积。
这里套用现实世界的知识,扭矩决定了发动机输出的力度,曲轴转速的变化、汽车的爬坡能力、起步速度及加速性。理论上,扭矩越大,起步速度就越快。(仅供理解,Unity中和现实世界还是不一样的)
该值设置过低会出现颠簸的情况。
对了!通过调整左右车轮的扭矩大小,应当可以模拟坦克转向!回头可以试试。
2.steerAngle
该值用以转向。以度为单位。一般来讲要模拟真实车辆,肯定不能直接设置该值多少度,这样太突兀了。比如设置当按下左方向键后2秒,角度才完全打完,这样模拟向左打方向盘。现实世界中车轮转向角度为30-40,各个车型略有不同。
下面简要模拟了一下:
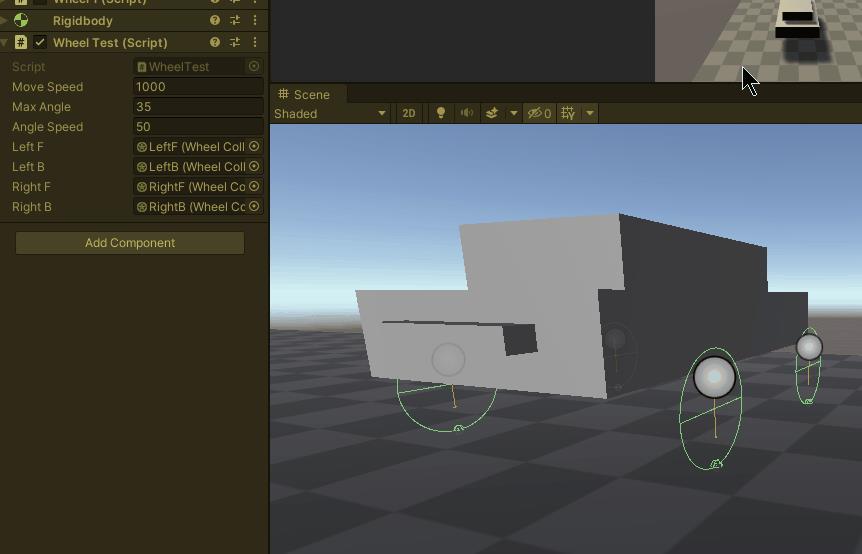
public float moveSpeed = 1500;
public float maxAngle = 35;
public float angleSpeed = 50;
public WheelCollider leftF;
public WheelCollider leftB;
public WheelCollider rightF;
public WheelCollider rightB;
private void Update()
float v = Input.GetAxisRaw("Vertical");
leftB.motorTorque = v * moveSpeed;
rightB.motorTorque = v * moveSpeed;
//左转向
if (Input.GetKey(KeyCode.A))
//Debug.Log(leftF.steerAngle);
leftF.steerAngle -= Time.deltaTime * angleSpeed;
rightF.steerAngle -= Time.deltaTime * angleSpeed;
if (leftF.steerAngle < (0-maxAngle) || rightF.steerAngle < (0-maxAngle))
//到最大值后就不能继续加角度了
leftF.steerAngle = (0 - maxAngle);
rightF.steerAngle = (0 - maxAngle);
//右转向
if (Input.GetKey(KeyCode.D))
leftF.steerAngle += Time.deltaTime * angleSpeed;
rightF.steerAngle += Time.deltaTime * angleSpeed;
if (leftF.steerAngle > maxAngle || rightF.steerAngle > maxAngle)
leftF.steerAngle = maxAngle;
rightF.steerAngle = maxAngle;
//松开转向后,方向打回
if (Input.GetKeyUp(KeyCode.A) || Input.GetKeyUp(KeyCode.D))
leftF.steerAngle = rightF.steerAngle = 0;
3.breakTorque
制动扭矩,单位还是N.m,必须为正数,用于刹车。看下面的代码就理解了。
至于这个数量设置多少合适,个人认为比车辆扭矩大一点就可以了,自己调整着来吧,反正也没个定值。
public float breakMove = 1000f;
bool isBraking = Input.GetKey(KeyCode.Space);
leftB.brakeTorque = isBraking ? breakMove : 0f;
rightB.brakeTorque = isBraking ? breakMove : 0f;
4.rpm
该车轮每分钟的转速,该参数可以拿来计算汽车的速度。
Rpm = wheel.rpm * (wheel.radius * 2 * Mathf.PI) * 60 / 1000);
五、总结和参考资料
1.总结
我们通过Unity提供的Wheel Collider用以模拟各种车辆,它们的前进后退,制动,转向,悬挂等功能。
- 通过motorTorque控制车辆扭矩
- 通过steerAngle控制车辆转向
- 通过breakTorque控制车辆制动
注意点:
- 碰撞器最上层空物体一定要加刚体组件
- 汽车轮胎模型自动的碰撞体记得删除
- 汽车轮胎模型和车轮碰撞体分别存放
车轮碰撞体参数:可设置该车轮的质量、半径、阻尼、悬挂、摩擦等特性。
2.参考资料
[1].天孤寒羽.unity小案例教程第二期(汽车)BiliBili
[2].Unity官方.Unity官方文档 车轮碰撞体
[3].Unity官方.Unity官方文档 WheelCollider API
[4].CoderZ1010.Unity 【Wheel Collider】实现游戏中的车具控制(CSDN)
[5].泰课在线.unity wheelcollider轮子转动
以上是关于unity wheelCollider怎么设置才能实现漂移的效果的主要内容,如果未能解决你的问题,请参考以下文章
unity-----------------------------关于WheelCollider设置或小车运动的注意事项