使用Rviz显示摄像头视频
Posted 冰软
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了使用Rviz显示摄像头视频相关的知识,希望对你有一定的参考价值。
目录
前言
如何使用OpenCV调用电脑摄像头或USB摄像头,本章Leslie就讲解如何使用rviz来显示摄像头的画面。
一、RVIZ介绍
数据类型介绍
1、配置摄像头
①USB选择3.0
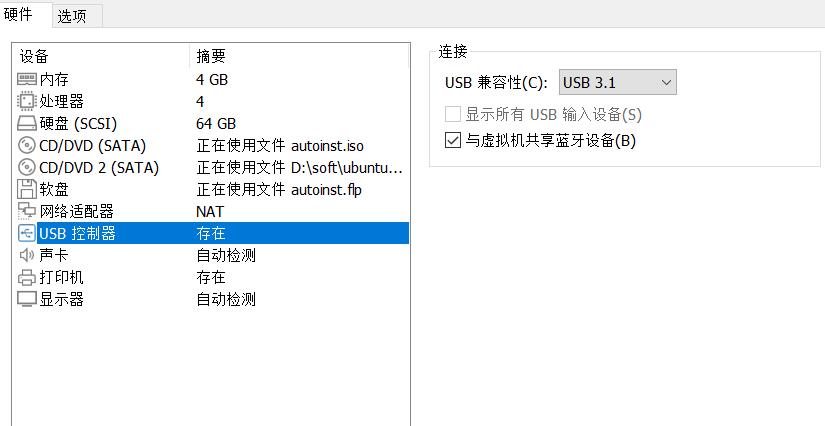
②连接主机摄像头 并用cheese命令检查摄像头的使用

2、下载相关功能包usb_cam和uvc_cam
安装驱动包 usb_cam
cd catkin_ws/src
git clone https://github.com/bosch-ros-pkg/usb_cam.git
cd ..
catkin_make
安装功能包
sudo apt-get install ros-kinetic-usb-cam
如果是uvc摄像头安装uvc的功能包
sudo apt-get install ros-kinetic-uvc-camera
安装image相关功能包
sudo apt-get install ros-kinetic-image-*
sudo apt-get install ros-kinetic-rqt-image-view
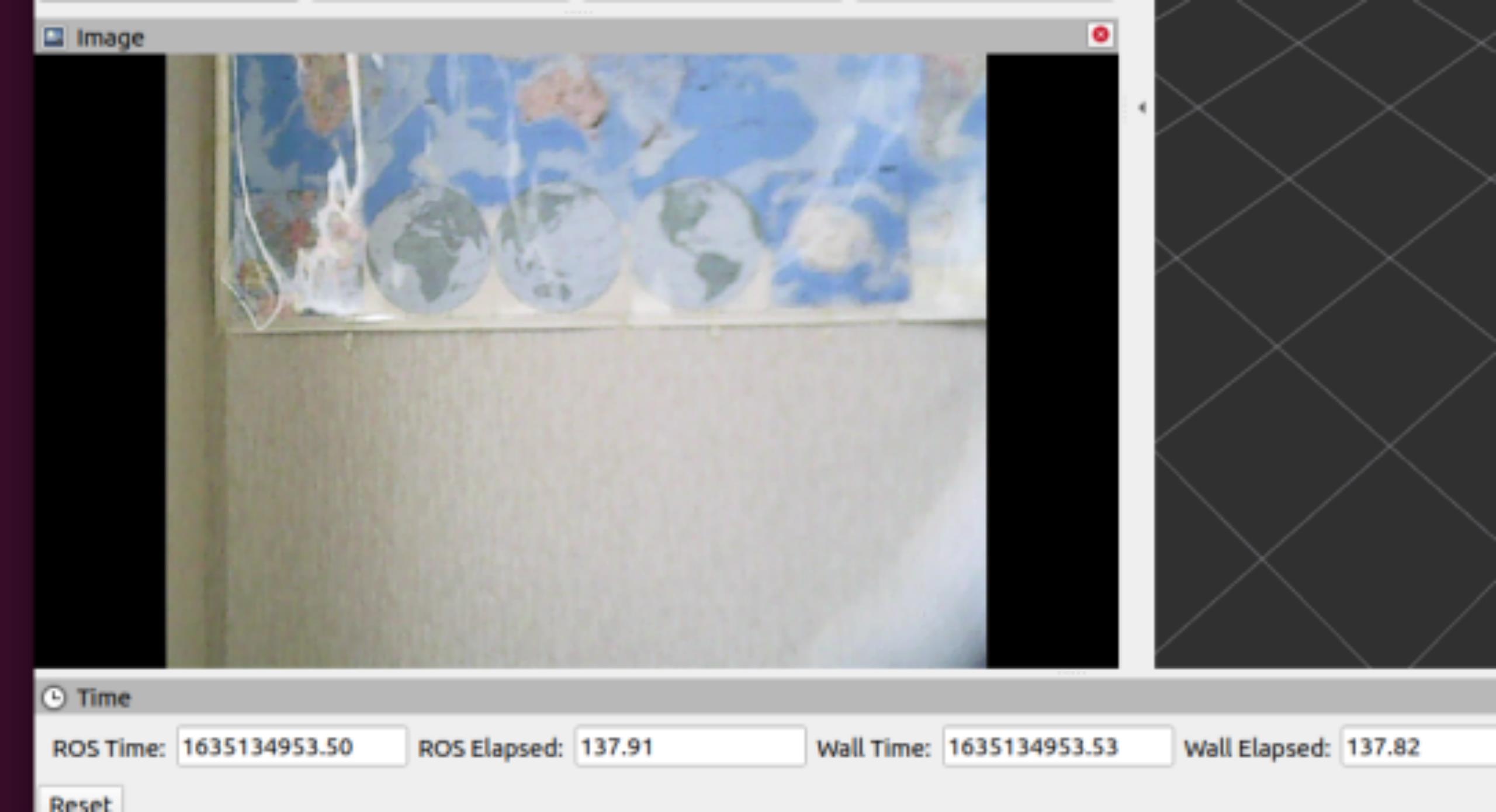
3、使用Rviz显示摄像头视频
启动ROS
roscore
另开终端,运行camera节点
rosrun usb_camera usb_camera_node
另开终端,查看消息话题
rostopic list
打印相机信息
rostopic echo /camera_info
打开Rviz配置摄像头
rosrun rviz rviz 详解
内置的显示类型
名称 |
描述 |
使用消息 |
轴 |
显示一组轴 |
|
努力 |
显示被放入每个回转关节的机器人的努力。 |
sensor_msgs/JointStates |
相机 |
它上面的图像,创建一个新的渲染窗口从一个相机和覆盖的角度。 |
sensor_msgs/图像, sensor_msgs/CameraInfo |
网格 |
显示一个 2D 或 3D 的网格,沿平面 |
|
网格单元格 |
从网格绘制细胞通常从 costmap导航堆栈中的障碍。 |
nav_msgs/GridCells |
图像 |
用图像创建一个新的渲染窗口。不同相机显示屏,这显示不使用 CameraInfo。版本: 小菜 + |
sensor_msgs/图像 |
InteractiveMarker |
显示 3D 对象从一个或多个交互式标记服务器并允许鼠标交互与他们。版本: 电 + |
visualization_msgs/InteractiveMarker |
激光扫描 |
显示来自激光扫描,用不同的选项,用于渲染模式、 积累等数据。 |
sensor_msgs/细度仪 |
地图 |
在地平面上显示地图。 |
nav_msgs/OccupancyGrid |
标记 |
允许程序员将显示任意的原始形状,通过主题 |
visualization_msgs/标记, visualization_msgs/MarkerArray |
路径 |
显示了导航堆栈中的路径。 |
nav_msgs/路径 |
点 |
绘制一个点作为一个小的球体。 |
geometry_msgs/PointStamped |
构成 |
绘制箭头或轴作为一个姿势。 |
geometry_msgs/PoseStamped |
构成阵列 |
绘制箭头,一个用于每个姿势姿势数组中"云" |
geometry_msgs/PoseArray |
点 Cloud(2) |
显示数据点云,用不同的选项,用于渲染模式、 积累等。 |
sensor_msgs/点云数据, sensor_msgs/PointCloud2 |
多边形 |
为线条绘制多边形的轮廓。 |
geometry_msgs/多边形 |
里程计 |
累积里程计姿势多时间。 |
nav_msgs/里程计 |
范围 |
显示代表从声纳或红外范围传感器范围测量的视锥细胞。版本: 电 + |
sensor_msgs/范围 |
RobotModel |
显示一个可视化的机器人在正确的姿势 (由当前的 TF 变换定义)。 |
|
TF |
显示的tf变换层次结构。 |
|
扳手 |
绘制箭头 (力) 和箭头 + 圆 (扭矩) 扳手 |
geometry_msgs/WrenchStamped |
眼 |
呈现到眼耳机 RViz 现场 |
以上是关于使用Rviz显示摄像头视频的主要内容,如果未能解决你的问题,请参考以下文章
ubuntu14.04,SONY摄像机使用1394线传输视频,cheese无法识别设备,是不是支持?啥视频采集软件支持?