摄像头v4l2编写,实现视频在帧缓冲显示
Posted
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了摄像头v4l2编写,实现视频在帧缓冲显示相关的知识,希望对你有一定的参考价值。
申明:该文档只是记录我的编写和理解过程,代码部分参考了较多的文章,如有意见请联系我删除,谢谢。
目标:
使用v4l2提供API,完成摄像头视频采集,并使用帧缓存显示。
准备工作:
- USB摄像头1个
- 编译环境(我用的是PC+Ubuntu14.04)
- 了解大概情况,查看如下网址,基本情况应该没问题了:http://baike.baidu.com/item/V4L2?sefr=enterbtn
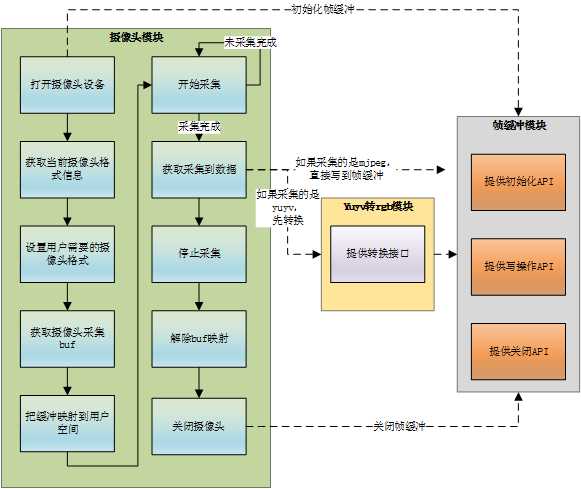
框架理解:
关键点理解:
摄像头采集的循环buf
必须使用循环buf,否则摄像头采集图像显示不会连续。
摄像头的分辨率和帧缓冲的分辨率
摄像头的分辨率和帧缓冲的分辨率不相同,不能套用同一个宽高,需要区别对待,否则会导致显示花屏或其他未知后果。
yuyv转换rgb
yuyv:4个字节,表示2个像素(uv共用),也就是说一个像素2个字节。
rgb24:3个字节,表示1个像素
rgb32:4个字节,表示1个像素
YUV到RGB的转换有如下公式:
R = 1.164*(Y-16) + 1.159*(V-128);
G = 1.164*(Y-16) - 0.380*(U-128)+ 0.813*(V-128);
B = 1.164*(Y-16) + 2.018*(U-128));
举例:一个yuyv的转换到rgb32如下:
1、先从yuyv中取出第一个像素点: y0 u v
2、可以用公式计算出 R0 G0 B0 的值。
3、组装成RGB32的第一个像素点: rgb32_0[4]={R0,G0,B0,0}
4、再从yuyv中取出第二个像素点: y1 u v (注意这里uv共用)
5、可以用公式计算出 R1 G1 B1 的值。
6、组装成RGB32的第二个像素点: rgb32_1[4]={R0,G0,B0,0}
搭建框架:
为了方便,全部代码都放到一个文件中。最好的方式是按功能拆分成多个文件,这里为了理解方便,就不拆分了。
黑色是摄像头模块(v4l2) 蓝色是帧缓冲模块
1 void main() 2 { 3 //打开摄像头设备 4 open_cameral(MY_CAMERA); 5 //初始化帧缓冲 6 init_FrameBuffer(); 7 //获取当前摄像头的格式信息 8 get_camInfo(); 9 //设置用户需要的摄像头格式信息(分辨率和图形格式) 10 set_format(); 11 //获取摄像头采集图片buf 12 get_buf(); 13 //映射buf到用户空间 14 map_buf(); 15 //开始采集 16 startcon(); 17 while(1) //这里可以优化成select,就不会阻塞了 18 { 19 //获取采集到的数据 20 get_picture(bmp); 21 //把采集数据写入帧缓冲 22 write_data_to_fb(FrameBuffer, Frame_fd, bmp, cam_width, cam_hight, Framebpp); 23 } 24 25 //停止采集 26 stopcon(); 27 //解除映射 28 bufunmap(); 29 //关闭帧缓冲 30 exit_Framebuffer(); 31 //关闭摄像头设备 32 close_cameral(); 33 }
具体实现:
摄像头模块
打开摄像头设备
这里为了通用,把摄像头设备路径作为入参传入。
1 //打开摄像头设备 2 int open_cameral(char* path) 3 { 4 fd=open(path,O_RDWR); 5 if (fd < 0) { 6 printf("Open /dev/video0 failed\\n"); 7 return -1; 8 } 9 }
一般usb摄像头,插入后,会直接生成设备文件:/dev/videox,这里的x范围[0~n],表示第几个usb摄像头设备,我的测试环境由于只有1个,所以是/dev/video0。
获取当前摄像头的格式信息
这里刚开始我也很困惑,这里获取摄像头信息有什么用。后面自己分析了下,主要原因是获取当前摄像头支持的图片格式,防止后面设置的时候设置不正确。
有些老式的摄像头,只有yuyv格式,后面采集就只能采集成yuyv格式,再转换下。
1 //获取摄像头信息 2 void get_camInfo(void) 3 { 4 struct v4l2_format fmt; 5 fmt.type=V4L2_BUF_TYPE_VIDEO_CAPTURE; 6 //获取当前摄像头的宽高 7 ioctl(fd, VIDIOC_G_FMT, &fmt); 8 printf("Current data format information:\\n\\twidth:%d\\n\\theight:%d\\n",fmt.fmt.pix.width,fmt.fmt.pix.height); 9 10 struct v4l2_fmtdesc fmtdesc; 11 fmtdesc.index=0; 12 fmtdesc.type=V4L2_BUF_TYPE_VIDEO_CAPTURE; 13 //获取当前摄像头支持的格式 14 while(ioctl(fd,VIDIOC_ENUM_FMT,&fmtdesc)!=-1) 15 { 16 if(fmtdesc.pixelformat & fmt.fmt.pix.pixelformat) 17 { 18 printf("\\tformat:%s\\n",fmtdesc.description); 19 break; 20 } 21 fmtdesc.index++; 22 } 23 }
这里我只是通过打印来查看,没有直接在代码里面比较,可以在后期优化中添加。
设置用户需要的摄像头格式信息
这里需要注意,选择格式的时候,一定要确认你的摄像头是否支持。这里格式有2种yuyv和mjpeg,可以通过上面的接口 get_camInfo 来查看。我的设备只支持yuyv,所以这里选择V4L2_PIX_FMT_YUYV。
如果摄像头支持mjpeg,建议直接选择V4L2_PIX_FMT_MJPEG,避免后面转换。
1 //设置摄像头具体格式 2 int set_format() 3 { 4 struct v4l2_format fmt; 5 fmt.type = V4L2_BUF_TYPE_VIDEO_CAPTURE; //这里必须填这个 6 fmt.fmt.pix.width = cam_width; //用户希望设置的宽 7 fmt.fmt.pix.height = cam_hight; //用户希望设置的高 8 fmt.fmt.pix.pixelformat = V4L2_PIX_FMT_YUYV;//选择格式:V4L2_PIX_FMT_YUYV或V4L2_PIX_FMT_MJPEG 9 fmt.fmt.pix.field = V4L2_FIELD_INTERLACED; 10 int ret = ioctl(fd, VIDIOC_S_FMT, &fmt); 11 if (ret < 0) { 12 printf("VIDIOC_S_FMT failed (%d)\\n", ret); 13 return -1; 14 } 15 //如果用户传入超过了实际摄像头支持大小,摄像头会自动缩小成最大支持。这里把摄像头当前支持的宽高情况反馈给用户。 16 cam_width = fmt.fmt.pix.width; 17 cam_hight = fmt.fmt.pix.height; 18 19 printf("------------VIDIOC_S_FMT---------------\\n"); 20 printf("Stream Format Informations:\\n"); 21 printf(" type: %d\\n", fmt.type); 22 printf(" width: %d\\n", fmt.fmt.pix.width); 23 printf(" height: %d\\n", fmt.fmt.pix.height); 24 return 0; 25 }
获取摄像头采集图片buf
由于摄像头采集数据是放在内部的buf中的,我们需要申请内部buf存放采集数据。一般选择4个内部buf,构造成一个简单的循环buf,方便图片的循环显示。
1 //获取摄像头图片采集的缓存buf 2 int get_buf(void) 3 { 4 struct v4l2_requestbuffers req; 5 memset(&req, 0, sizeof (req)); 6 req.count = CBUF_NUM; //摄像头图片缓存buf个数,这里一般设置4个 7 req.type = V4L2_BUF_TYPE_VIDEO_CAPTURE; 8 req.memory = V4L2_MEMORY_MMAP; 9 if (ioctl(fd,VIDIOC_REQBUFS,&req) <0) 10 { 11 perror("VIDIOC_REQBUFS error \\n"); 12 return -1; 13 } 14 return 0; 15 }
这里不构造循环队列,后面映射的时候再构造。
映射buf到用户空间
将申请到的buf映射到用户空间,这样就可以直接操作采集到的帧了,而不必去复制,提升性能。
1 //映射buf到用户空间 2 void map_buf(void) 3 { 4 int numBufs = 0; 5 struct v4l2_buffer tmp_buf ; //摄像头缓冲buf临时保存buf 6 for (numBufs = 0; numBufs < CBUF_NUM; numBufs++) 7 { 8 memset( &tmp_buf, 0, sizeof(tmp_buf) ); 9 tmp_buf.type = V4L2_BUF_TYPE_VIDEO_CAPTURE ; 10 tmp_buf.memory = V4L2_MEMORY_MMAP ; 11 tmp_buf.index = numBufs; 12 //获取内部buf信息到tmp_buf 13 if (ioctl(fd, VIDIOC_QUERYBUF, &tmp_buf) < 0) 14 { 15 printf("VIDIOC_QUERYBUF (%d) error\\n",numBufs); 16 return; 17 } 18 pic_buffers[numBufs].length = tmp_buf.length; 19 pic_buffers[numBufs].offset = (size_t) tmp_buf.m.offset; 20 //开始映射 21 pic_buffers[numBufs].start = mmap (NULL, tmp_buf.length,PROT_READ | PROT_WRITE, MAP_SHARED, fd, tmp_buf.m.offset); 22 if (pic_buffers[numBufs].start == MAP_FAILED) 23 { 24 perror("pic_buffers error\\n"); 25 //return -1; 26 } 27 //把设置好的buf入队列 28 if (ioctl (fd, VIDIOC_QBUF, &tmp_buf) < 0) 29 { 30 printf("VIDIOC_QBUF error\\n"); 31 //return -1; 32 } 33 } 34 //初始化入队出队 35 enqueue.type = V4L2_BUF_TYPE_VIDEO_CAPTURE ; 36 dequeue.type = V4L2_BUF_TYPE_VIDEO_CAPTURE ; 37 enqueue.memory = V4L2_MEMORY_MMAP ; 38 dequeue.memory = V4L2_MEMORY_MMAP ; 39 }
开始采集
1 //开始采集 2 void startcon() 3 { 4 enum v4l2_buf_type type; 5 type = V4L2_BUF_TYPE_VIDEO_CAPTURE; 6 if (ioctl (fd, VIDIOC_STREAMON, &type) < 0) 7 { 8 printf("VIDIOC_STREAMON error\\n"); 9 // return -1; 10 } 11 }
获取采集到的数据
1 //获取采集到的数据 2 int get_picture(char *buffer) 3 { 4 int ret ; 5 //把采集到图片的缓冲出队 6 ret = ioctl(fd , VIDIOC_DQBUF , &dequeue); 7 if(ret != 0) 8 { 9 perror("dequeue fail"); 10 return -1 ; 11 } 12 13 //把图片数据放到buffer中 14 memcpy(buffer , pic_buffers[dequeue.index].start , pic_buffers[dequeue.index].length); 15 16 //由于当前出队的缓冲数据已经拷贝到用户buffer中,这里可以重新入队用于后面的数据保存,构造起循环队列。 17 enqueue.index = dequeue.index ; 18 ret = ioctl(fd , VIDIOC_QBUF , &enqueue); 19 if(ret != 0) 20 { 21 perror("enqueue fail"); 22 return -2 ; 23 } 24 return 0 ; 25 }
停止采集
1 int stopcon(void) 2 { 3 //停止摄像头 4 int ret ; 5 int off= 1 ; 6 ret = ioctl(fd , VIDIOC_STREAMOFF, &off); 7 if(ret != 0) 8 { 9 perror("stop Cameral fail"); 10 return -1 ; 11 } 12 return 0 ; 13 }
解除映射
1 int bufunmap(void) 2 { 3 int i ; 4 for(i = 0 ; i < CBUF_NUM ; i++) 5 { 6 munmap(pic_buffers[i].start , pic_buffers[i].length); 7 } 8 return 0 ; 9 }
关闭摄像头设备
1 //关闭摄像头 2 void close_cameral(void) 3 { 4 close(fd); 5 }
帧缓冲模块
初始化帧缓冲
1 //初始化framebuffer 2 int init_FrameBuffer(void) 3 { 4 5 struct fb_var_screeninfo vinfo; 6 struct fb_fix_screeninfo finfo; 7 Frame_fd = open("/dev/fb0" , O_RDWR); 8 if(-1 == Frame_fd) 9 { 10 perror("open frame buffer fail"); 11 return -1 ; 12 } 13 14 // Get fixed screen information 15 if (ioctl(Frame_fd, FBIOGET_FSCREENINFO, &finfo)) 16 { 17 printf("Error reading fixed information.\\n"); 18 exit(0); 19 } 20 21 // Get variable screen information 22 if (ioctl(Frame_fd, FBIOGET_VSCREENINFO, &vinfo)) 23 { 24 printf("Error reading variable information.\\n"); 25 exit(0); 26 } 27 //这里把整个显存一起初始化(xres_virtual 表示显存的x,比实际的xres大,bits_per_pixel位深) 28 screensize = vinfo.xres_virtual * vinfo.yres_virtual * vinfo.bits_per_pixel / 8; 29 //获取实际的位色,这里很关键,后面转换和填写的时候需要 30 Framebpp = vinfo.bits_per_pixel; 31 printf("%dx%d, %dbpp screensize is %ld\\n", vinfo.xres_virtual, vinfo.yres_virtual, vinfo.bits_per_pixel,screensize); 32 33 //映射出来,用户直接操作 34 FrameBuffer = mmap(0, screensize, PROT_READ | PROT_WRITE , MAP_SHARED , Frame_fd ,0 ); 35 if(FrameBuffer == (void *)-1) 36 { 37 perror("memory map fail"); 38 return -2 ; 39 } 40 return 0 ; 41 }
填写帧缓冲
1 //写入framebuffer fbp:帧缓冲首地址 fbfd:帧缓冲fd img_buf:采集到的图片首地址 width:用户的宽 height:用户的高 bits:帧缓冲的位深 2 int write_data_to_fb(void *fbp, int fbfd, void *img_buf, unsigned int img_width, unsigned int img_height, unsigned int img_bits) 3 { 4 int row, column; 5 int num = 0; //img_buf 中的某个像素点元素的下标 6 rgb32_frame *rgb32_fbp = (rgb32_frame *)fbp; 7 rgb32 *rgb32_img_buf = (rgb32 *)img_buf; 8 9 //防止摄像头采集宽高比显存大 10 if(screensize < img_width * img_height * img_bits / 8) 11 { 12 printf("the imgsize is too large\\n"); 13 return -1; 14 } 15 16 /*不同的位深度图片使用不同的显示方案*/ 17 switch (img_bits) 18 { 19 case 32: 20 for(row = 0; row < img_height; row++) 21 { 22 for(column = 0; column < img_width; column++) 23 { 24 //由于摄像头分辨率没有帧缓冲大,完成显示后,需要强制换行,帧缓冲是线性的,使用row * vinfo.xres_virtual换行 25 rgb32_fbp[row * Framex + column].r = rgb32_img_buf[num].r; 26 rgb32_fbp[row * Framex + column].g = rgb32_img_buf[num].g; 27 rgb32_fbp[row * Framex + column].b = rgb32_img_buf[num].b; 28 29 num++; 30 } 31 } 32 break; 33 default: 34 break; 35 } 36 37 return 0; 38 }
这里有个关键点:帧缓冲存放的格式是bgr,不能直接rgb拷贝,需要转换下,否则显示颜色不对。
由于我是是32位的,所以只写了32位,具体的目标板上可能是24位的,需要修改对应的结构rgb32_frame和rgb32。 rgb24和rgb32的区别,请自行百度。
如下是32位的:
1 //rgb结构 2 typedef struct { 3 uint_8 r; // 红色分量 4 uint_8 g; // 绿色分量 5 uint_8 b; // 蓝色分量 6 uint_8 rgbReserved; // 保留字节(用作Alpha通道或忽略) 7 } rgb32; 8 9 //帧缓冲中的rgb结构 10 typedef struct { 11 uint_8 b; // 蓝色分量 12 uint_8 g; // 绿色分量 13 uint_8 r; // 红色分量 14 uint_8 rgbReserved; // 保留字节(用作Alpha通道或忽略) 15 } rgb32_frame;
如下是24位的:
1 //rgb结构 2 typedef struct { 3 uint_8 r; // 红色分量 4 uint_8 g; // 绿色分量 5 uint_8 b; // 蓝色分量 6 } rgb24; 7 8 //帧缓冲中的rgb结构 9 typedef struct { 10 uint_8 b; // 蓝色分量 11 uint_8 g; // 绿色分量 12 uint_8 r; // 红色分量 13 } rgb24_frame;
退出帧缓冲
1 //退出framebuffer 2 int exit_Framebuffer(void) 3 { 4 munmap(FrameBuffer , screensize); 5 close(Frame_fd); 6 return 0 ; 7 }
转换模块
yuyv转rgb
//yuyv转rgb32的算法实现 static int sign3 = 1; /* YUV到RGB的转换有如下公式: R = 1.164*(Y-16) + 1.159*(V-128); G = 1.164*(Y-16) - 0.380*(U-128)+ 0.813*(V-128); B = 1.164*(Y-16) + 2.018*(U-128)); */ int yuvtorgb(int y, int u, int v) { unsigned int pixel32 = 0; unsigned char *pixel = (unsigned char *)&pixel32; int r, g, b; static long int ruv, guv, buv; if(1 == sign3) { sign3 = 0; ruv = 1159*(v-128); guv = -380*(u-128) + 813*(v-128); buv = 2018*(u-128); } r = (1164*(y-16) + ruv) / 1000; g = (1164*(y-16) - guv) / 1000; b = (1164*(y-16) + buv) / 1000; if(r > 255) r = 255; if(g > 255) g = 255; if(b > 255) b = 255; if(r < 0) r = 0; if(g < 0) g = 0; if(b < 0) b = 0; pixel[0] = r; pixel[1] = g; pixel[2] = b; return pixel32; } int yuyv2rgb32(unsigned char *yuv, unsigned char *rgb, unsigned int width, unsigned int height) { unsigned int in, out; int y0, u, y1, v; unsigned int pixel32; unsigned char *pixel = (unsigned char *)&pixel32; //分辨率描述像素点个数,而yuv2个像素点占有4个字符,所以这里计算总的字符个数,需要乘2 unsigned int size = width*height*2; for(in = 0, out = 0; in < size; in += 4, out += 8) { y0 = yuv[in+0]; u = yuv[in+1]; y1 = yuv[in+2]; v = yuv[in+3]; sign3 = 1; pixel32 = yuvtorgb(y0, u, v); rgb[out+0] = pixel[0]; rgb[out+1] = pixel[1]; rgb[out+2] = pixel[2]; rgb[out+3] = 0; //32位rgb多了一个保留位 pixel32 = yuvtorgb(y1, u, v); rgb[out+4] = pixel[0]; rgb[out+5] = pixel[1]; rgb[out+6] = pixel[2]; rgb[out+7] = 0; } return 0; }
以上是关于摄像头v4l2编写,实现视频在帧缓冲显示的主要内容,如果未能解决你的问题,请参考以下文章