ROS机器人仿真运动学和动力学位置曲线差异
Posted zhangrelay
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了ROS机器人仿真运动学和动力学位置曲线差异相关的知识,希望对你有一定的参考价值。
配置完成后,分别使用如下命令打开三维仿真和二维仿真:
roslaunch robot1_gazebo gazebo_empty.launch
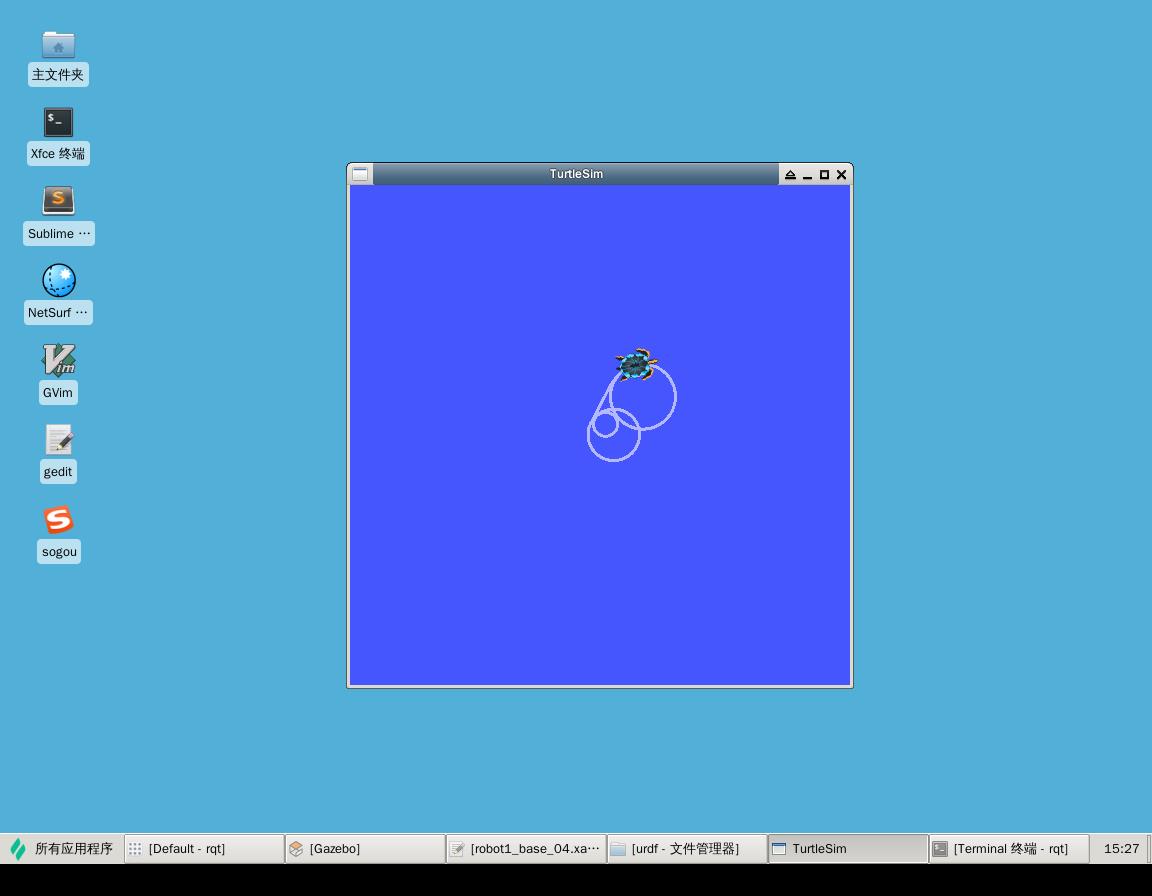
rosrun turtlesim turtlesim_node
通用性:
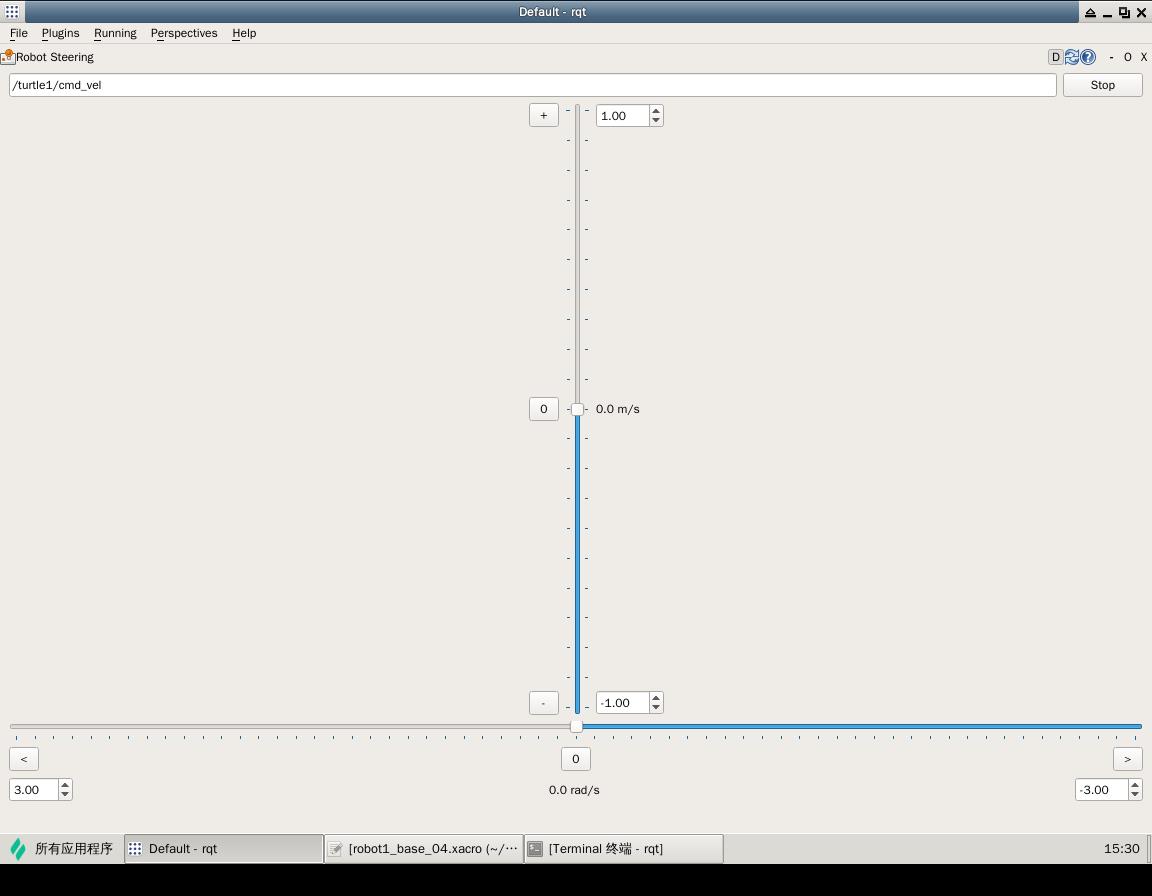
使用/cmd_vel,速度指令,均可以控制机器人运动。
- 机器人/cmd_vel
- 小乌龟/turtle1/cmd_vel
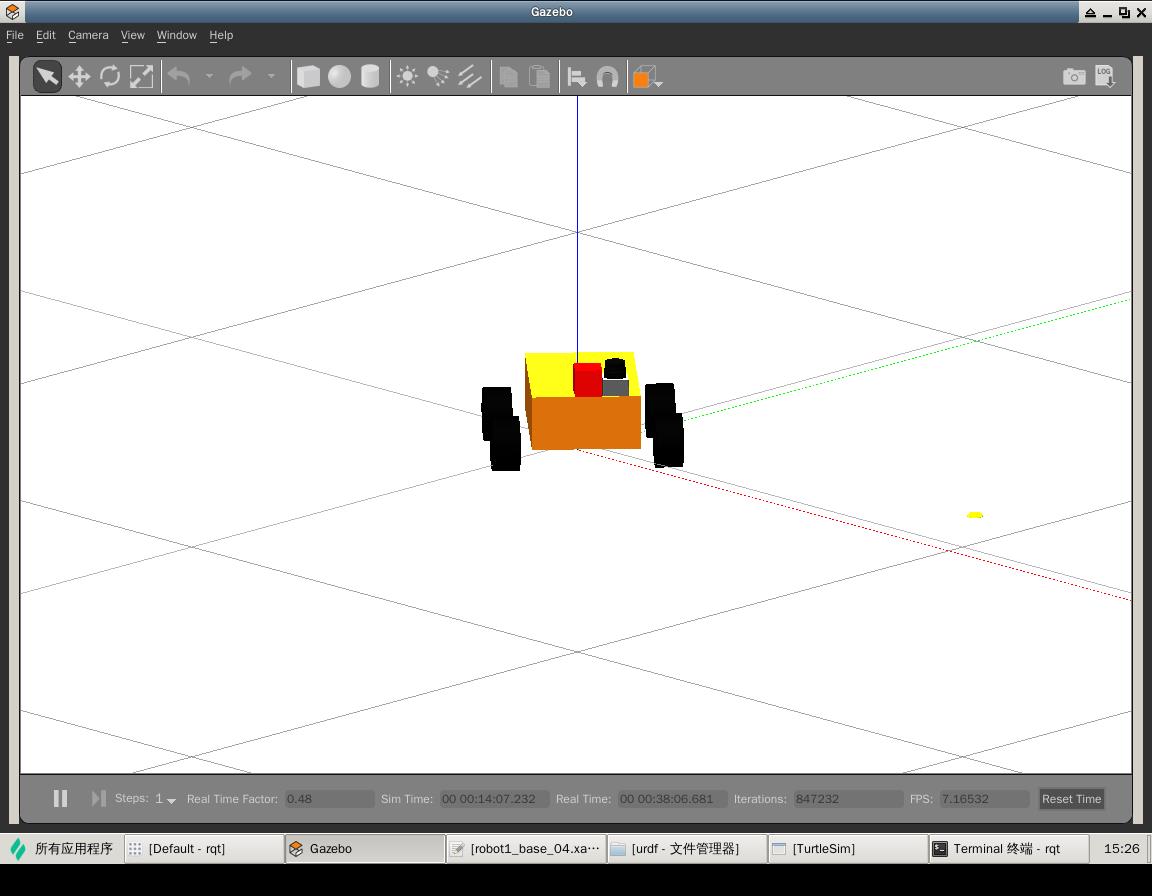
三维仿真如下:
二维仿真如下:
但是由于三维仿真中机器人是有惯性等物理特性,
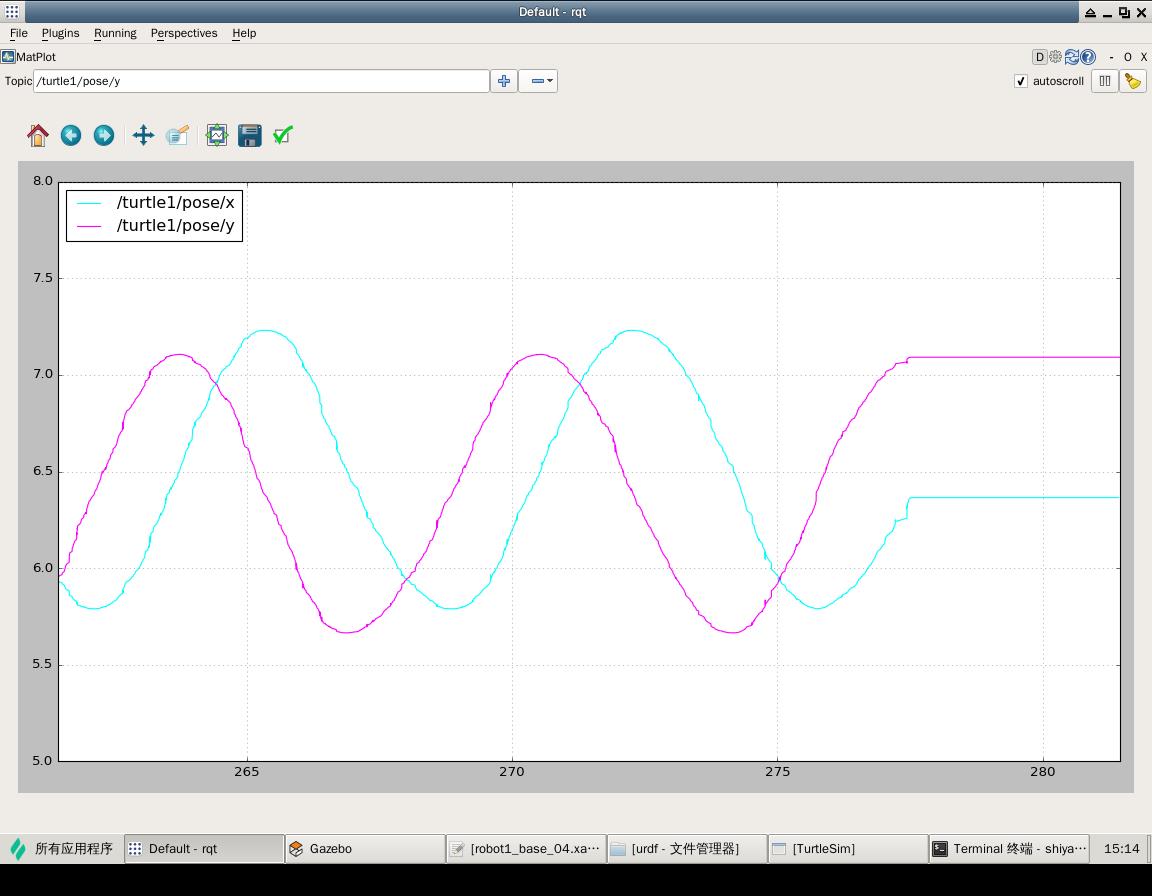
位置曲线如下:
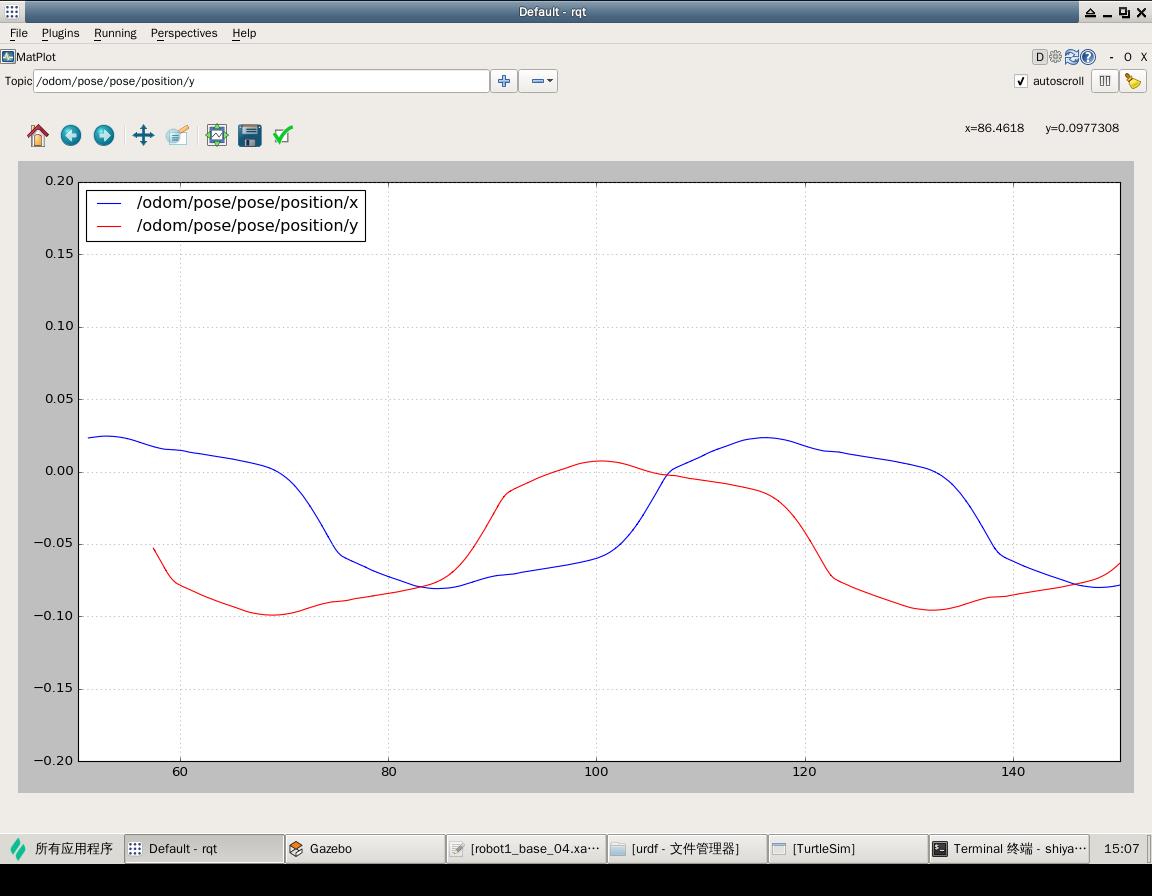
上图是由于动力学模型导致的。
小海龟为运动学模型:
为何很多仿真数据实际上不能用?
对实际模型进行大量简化,导致与原有模型不匹配。
实验所用全部指令汇总:
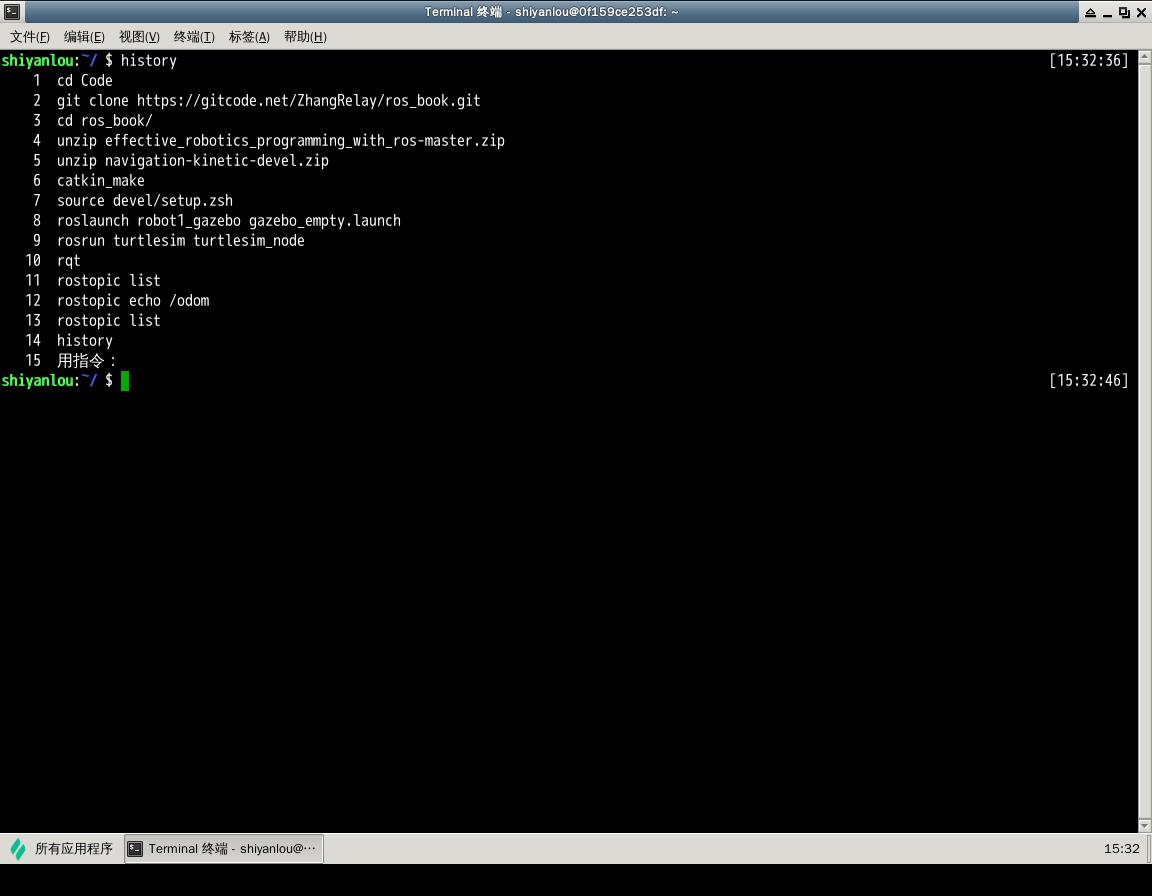
shiyanlou:~/ $ history [15:32:36]
1 cd Code
2 git clone https://gitcode.net/ZhangRelay/ros_book.git
3 cd ros_book/
4 unzip effective_robotics_programming_with_ros-master.zip
5 unzip navigation-kinetic-devel.zip
6 catkin_make
7 source devel/setup.zsh
8 roslaunch robot1_gazebo gazebo_empty.launch
9 rosrun turtlesim turtlesim_node
10 rqt
11 rostopic list
12 rostopic echo /odom
13 rostopic list
14 history
以上是关于ROS机器人仿真运动学和动力学位置曲线差异的主要内容,如果未能解决你的问题,请参考以下文章